You might also like
- Hydrocarbon Fluid Inclusions in Petroliferous BasinsFrom EverandHydrocarbon Fluid Inclusions in Petroliferous BasinsNo ratings yet
- Tarea 19 - Metodo API Rp11lDocument12 pagesTarea 19 - Metodo API Rp11lMelo GutiérrezNo ratings yet
- Development of Volcanic Gas Reservoirs: The Theory, Key Technologies and Practice of Hydrocarbon DevelopmentFrom EverandDevelopment of Volcanic Gas Reservoirs: The Theory, Key Technologies and Practice of Hydrocarbon DevelopmentNo ratings yet
- 2006 International Sucker Rod Pumping WorkshopDocument33 pages2006 International Sucker Rod Pumping WorkshopRodrigo DacolNo ratings yet
- Wave Propagation in Drilling, Well Logging and Reservoir ApplicationsFrom EverandWave Propagation in Drilling, Well Logging and Reservoir ApplicationsNo ratings yet
- Chapter Five Jet Pumping System (JP)Document33 pagesChapter Five Jet Pumping System (JP)mghareebNo ratings yet
- Weatherford CORODDocument6 pagesWeatherford CORODclass 96No ratings yet
- Depositional History of Franchthi Cave: Stratigraphy, Sedimentology, and Chronology, Fascicle 12From EverandDepositional History of Franchthi Cave: Stratigraphy, Sedimentology, and Chronology, Fascicle 12No ratings yet
- SPE-23429 A Simple Method of Predicting The Performance of Sucker Rod Pumping SystemDocument10 pagesSPE-23429 A Simple Method of Predicting The Performance of Sucker Rod Pumping SystemOsmund MwangupiliNo ratings yet
- Formation Testing: Supercharge, Pressure Testing, and Contamination ModelsFrom EverandFormation Testing: Supercharge, Pressure Testing, and Contamination ModelsNo ratings yet
- Optimize Your Sucker Rod Pump PerformanceDocument27 pagesOptimize Your Sucker Rod Pump PerformanceMuhammad N BashashaNo ratings yet
- General Hydraulic Manual 02Document196 pagesGeneral Hydraulic Manual 02Malek r.i.pNo ratings yet
- Methods To Improve The Efficiency of Rod-Drawn Subsurface PumpsDocument16 pagesMethods To Improve The Efficiency of Rod-Drawn Subsurface PumpsRichard More LeonNo ratings yet
- OHI - PumpSystems (Bombeo Hidráulico - Oilwell Hyd)Document18 pagesOHI - PumpSystems (Bombeo Hidráulico - Oilwell Hyd)Adamec PachecoNo ratings yet
- Beam Pumping System For Deep High-Volume WellsDocument16 pagesBeam Pumping System For Deep High-Volume WellsIri PelaezNo ratings yet
- 1 4 Calculation of Acoustic BHP 2014Document60 pages1 4 Calculation of Acoustic BHP 2014Luis Enrique Muñoz SeguraNo ratings yet
- Sucker Rod String Design OptimizationDocument9 pagesSucker Rod String Design Optimizationsiraj1993No ratings yet
- Lufkin Automation PDFDocument4 pagesLufkin Automation PDFy149487No ratings yet
- Troubleshooting ROD PUMPSDocument7 pagesTroubleshooting ROD PUMPSLeonardo Arzuza DuránNo ratings yet
- Progressive Cavity Pump Manual: Version 07/03Document23 pagesProgressive Cavity Pump Manual: Version 07/03Jose Miguel GonzalezNo ratings yet
- Lufkin Mark IIDocument8 pagesLufkin Mark IIjulioramcaNo ratings yet
- Dura - Product CatalogDocument245 pagesDura - Product CatalogPedro Antonio Mejia SuarezNo ratings yet
- Presentation I-3 - UPCO - Sucker Rod Factors Affecting Make-UpDocument31 pagesPresentation I-3 - UPCO - Sucker Rod Factors Affecting Make-Upargentino_ar01No ratings yet
- Sucker Rods Brochure 851 06Document12 pagesSucker Rods Brochure 851 06Ronald LlerenaNo ratings yet
- Cvs X 1 CaliperDocument9 pagesCvs X 1 Calipercryomancer23No ratings yet
- PEG 4102 - Sucker Rod Pump Project PresentationDocument22 pagesPEG 4102 - Sucker Rod Pump Project PresentationAlex StollNo ratings yet
- NitrogenoDocument139 pagesNitrogenoEmanuelLopezNo ratings yet
- Gas Seperator PDFDocument11 pagesGas Seperator PDFshy_boyNo ratings yet
- Gas Well IPR PDFDocument28 pagesGas Well IPR PDFReza ShamsNo ratings yet
- Sucker Rod PumpDocument5 pagesSucker Rod Pumpwilzy74No ratings yet
- McCoy, J.N. Et Al.:rotaflex Efficiency and BalancingDocument9 pagesMcCoy, J.N. Et Al.:rotaflex Efficiency and BalancingSolenti D'nouNo ratings yet
- Motor Power Current Measurement For Improving Rod Pump EfficDocument13 pagesMotor Power Current Measurement For Improving Rod Pump EfficManoel Hermínio Vieira NetoNo ratings yet
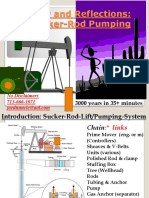
- History and Reflecions Sucker Rod PumpingDocument18 pagesHistory and Reflecions Sucker Rod PumpingRichard More LeonNo ratings yet
- Tricocat PDFDocument44 pagesTricocat PDFJuan PabloNo ratings yet
- Install Gas Separator 2.6Document3 pagesInstall Gas Separator 2.6Bombasticos FcNo ratings yet
- Analysis of An Annular Pressure Buildup Failure During Drill AheadDocument6 pagesAnalysis of An Annular Pressure Buildup Failure During Drill AheadJulian OlarteNo ratings yet
- Sucker Rod Lifecycle ChartDocument1 pageSucker Rod Lifecycle ChartMinimaxou78No ratings yet
- Progressive Cavity Pumps: Training GuideDocument18 pagesProgressive Cavity Pumps: Training GuideRyodi HanandaNo ratings yet
- Gas-Liquid Flow Through Electric Submersible PumpsDocument8 pagesGas-Liquid Flow Through Electric Submersible PumpspicapicNo ratings yet
- Plunger Fall Velocity Model 164495lDocument16 pagesPlunger Fall Velocity Model 164495lJonathan AvilaNo ratings yet
- SRP Report: Sucker Rod Pumping System OverviewDocument20 pagesSRP Report: Sucker Rod Pumping System OverviewDivyansh Singh ChauhanNo ratings yet
- Terminology and FormlaeDocument7 pagesTerminology and FormlaenabiNo ratings yet
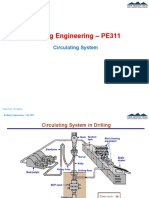
- 3 CirculatingSystemDocument19 pages3 CirculatingSystemAoun MuhammadNo ratings yet
- Plunger lift performance and operating experience in Ventura Avenue FieldDocument17 pagesPlunger lift performance and operating experience in Ventura Avenue FieldnicolasbelliniNo ratings yet
- KPC BOP Section ChecklistDocument7 pagesKPC BOP Section Checklistislam atifNo ratings yet
- PPE I PR 005Document11 pagesPPE I PR 005MahanderOadNo ratings yet
- C 06.C Wellhead DesignDocument6 pagesC 06.C Wellhead DesignJose David Hernandez OteroNo ratings yet
- C 17.a Well ServicingDocument6 pagesC 17.a Well ServicingTadjer AmineNo ratings yet
- New Methods for Deepwater Blowout InterventionDocument66 pagesNew Methods for Deepwater Blowout Interventionadityamdutta0% (1)
- CT Hydraulic JarsDocument2 pagesCT Hydraulic JarsAde RiantoNo ratings yet
- 29!541 Transient Aspects of Unloading Oil and Gas Wells With Coiled TubingDocument6 pages29!541 Transient Aspects of Unloading Oil and Gas Wells With Coiled TubingWaode GabriellaNo ratings yet
- Best Method To Balance Torque Loadings On A Pumping Unit GearboxDocument11 pagesBest Method To Balance Torque Loadings On A Pumping Unit GearboxNiurkarisNo ratings yet
- Mud/Gas Separator Sizing and Evaluation: G.R. MacdougallDocument6 pagesMud/Gas Separator Sizing and Evaluation: G.R. MacdougallDiego AraqueNo ratings yet
- Bottomhole Pressure 0504083Document6 pagesBottomhole Pressure 0504083Daniel DadzieNo ratings yet
- Reservoir SimulationDocument3 pagesReservoir SimulationEuler MendozaNo ratings yet
- Sucker Rod String Design by LufkinDocument9 pagesSucker Rod String Design by Lufkinachmad mahmudyNo ratings yet
- Wo Esp DevelopmentsDocument6 pagesWo Esp DevelopmentsHamed GeramiNo ratings yet
- Multiple Zone CompletionsDocument14 pagesMultiple Zone CompletionsweldsvNo ratings yet
- Other South America Bolivia Chile Paraguay Shale Field To Be ExploredDocument27 pagesOther South America Bolivia Chile Paraguay Shale Field To Be Exploredmichel louis friedmanNo ratings yet
- Optimization of Sucker Rod Replacement (1971) PDFDocument8 pagesOptimization of Sucker Rod Replacement (1971) PDFMuhammad Yunaldi PrayogaNo ratings yet
- High Volume Pumping With Sucker Rods (1968) PDFDocument7 pagesHigh Volume Pumping With Sucker Rods (1968) PDFMuhammad Yunaldi PrayogaNo ratings yet
- 3261Document26 pages3261Daniel ChiriacNo ratings yet
- Economical Selection of Sucker Rods (1935) PDFDocument13 pagesEconomical Selection of Sucker Rods (1935) PDFMuhammad Yunaldi PrayogaNo ratings yet
- Daftar Pustaka & Lampiran (FIX)Document2 pagesDaftar Pustaka & Lampiran (FIX)Muhammad Yunaldi PrayogaNo ratings yet
- PITPRO 125cc Parts ListDocument16 pagesPITPRO 125cc Parts ListMinibikeTech67% (3)
- Piston Type Steering Gears CatalogueDocument10 pagesPiston Type Steering Gears CatalogueMaria100% (1)
- Group 2 Specification: 1. Major ComponentDocument12 pagesGroup 2 Specification: 1. Major ComponentREMZONANo ratings yet
- 1959 Cessna 172 ManualDocument25 pages1959 Cessna 172 ManualRoberto Fernandez Sanzo100% (1)
- BSD EurocodeDocument187 pagesBSD EurocodeAndreea Nan50% (2)
- Toyota 1KZ-TE Installation InstructionsDocument2 pagesToyota 1KZ-TE Installation InstructionsWill Meridith100% (5)
- Growth of The STEAM-ENGINEDocument76 pagesGrowth of The STEAM-ENGINENauman KhanNo ratings yet
- Influence of The Calender Pattern On The MechanicaDocument183 pagesInfluence of The Calender Pattern On The MechanicautkayNo ratings yet
- Covered Wooden Bridges A Modern Analysis at The System and Componen Levels PDFDocument10 pagesCovered Wooden Bridges A Modern Analysis at The System and Componen Levels PDFFenny Novita Meysabed SianturiNo ratings yet
- Settlement of piles founded in rock calculation as per IS 8009 (Part IIDocument2 pagesSettlement of piles founded in rock calculation as per IS 8009 (Part IIpravinNo ratings yet
- ATPL Notes - Systems PDFDocument37 pagesATPL Notes - Systems PDFMoslem Grimaldi100% (1)
- Série D'exercices N°03 - Étude Des ContraintesDocument20 pagesSérie D'exercices N°03 - Étude Des ContraintesSERGIONo ratings yet
- 2013 Soil Mechanics II and Exercises Midterm Exam: e With Respect To The Initial Void Ratio. For This GroundDocument7 pages2013 Soil Mechanics II and Exercises Midterm Exam: e With Respect To The Initial Void Ratio. For This GroundAbera MamoNo ratings yet
- Performance Effect of Leading Edge Tubercles On The NREL Phases VI Wind Turbine BladeDocument12 pagesPerformance Effect of Leading Edge Tubercles On The NREL Phases VI Wind Turbine BladeLuis Saavedra Santa MariaNo ratings yet
- EagleBurgmann - E110801 - E1 - High-Pressure Seals For ESPO Pipeline Pumps - 10.11 PDFDocument2 pagesEagleBurgmann - E110801 - E1 - High-Pressure Seals For ESPO Pipeline Pumps - 10.11 PDFkztro066No ratings yet
- Auto Turning Fuel ValveDocument30 pagesAuto Turning Fuel ValveMahesh Dondapati67% (3)
- Tutorial For LRBDocument24 pagesTutorial For LRBcaptain_tamNo ratings yet
- Topics: Text Book PHYSICS For Scientists and Engineers With Modern Physics (6 Ed) by Serway & JewettDocument84 pagesTopics: Text Book PHYSICS For Scientists and Engineers With Modern Physics (6 Ed) by Serway & JewettBala KumarNo ratings yet
- 2022.10.28 3 Phase Decanter CentrifugeDocument14 pages2022.10.28 3 Phase Decanter CentrifugeGeorgeNo ratings yet
- Ix Est42 BlockdiagramDocument34 pagesIx Est42 BlockdiagramBranko AndricNo ratings yet
- Guitar StringsDocument4 pagesGuitar StringsantoniobhNo ratings yet
- DucatiDocument23 pagesDucatiKvk TorettoNo ratings yet
- Thermo Activity 4, 5Document4 pagesThermo Activity 4, 5Karl Christian Fajardo100% (1)
- Welding ChartDocument2 pagesWelding Chartjmcorsame777100% (2)
- c02 v11 Solution v2Document48 pagesc02 v11 Solution v2김서진No ratings yet
- SSFPL Forgings Profile CurrentDocument16 pagesSSFPL Forgings Profile CurrentMahendra PatilNo ratings yet
- Chapter 5-Part1-EEE301Document42 pagesChapter 5-Part1-EEE301DilekNo ratings yet
- Silo - Tips - Sync Spare Parts For JCB 3cx and 4cx Backhoe LoaderDocument135 pagesSilo - Tips - Sync Spare Parts For JCB 3cx and 4cx Backhoe LoaderOrkhan Gurbanov100% (1)
- Whirlpool FL 5090aDocument14 pagesWhirlpool FL 5090aLiviu PetreNo ratings yet
- (Hoccokhi - VN) Bai Tap Lap Rap Solidworks 2dongco NgangDocument4 pages(Hoccokhi - VN) Bai Tap Lap Rap Solidworks 2dongco NgangChien Dang VanNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Industrial Waste Treatment HandbookFrom EverandIndustrial Waste Treatment HandbookRating: 5 out of 5 stars5/5 (1)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- DIY Free Home Energy Solutions: How to Design and Build Your own Domestic Free Energy SolutionFrom EverandDIY Free Home Energy Solutions: How to Design and Build Your own Domestic Free Energy SolutionRating: 5 out of 5 stars5/5 (1)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Power Quality in Power Systems and Electrical MachinesFrom EverandPower Quality in Power Systems and Electrical MachinesRating: 4.5 out of 5 stars4.5/5 (11)
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet