You might also like
- Acoustic Remote Sensing in Maritime Archaeology - Rory QuinnDocument22 pagesAcoustic Remote Sensing in Maritime Archaeology - Rory QuinnDarko KovacevicNo ratings yet
- Mine SurveyingDocument57 pagesMine SurveyingPatrick Menchero Soriaga100% (2)
- Orpheus WoD 2 0Document62 pagesOrpheus WoD 2 0Matheus PradoNo ratings yet
- Lab Manual Fall 2017Document68 pagesLab Manual Fall 2017Nil SabbirNo ratings yet
- Aec3414 Philosophy FinalDocument5 pagesAec3414 Philosophy Finalapi-532996380No ratings yet
- Intelligence PresentationDocument50 pagesIntelligence PresentationChester Cuarentas100% (1)
- History of LoggingDocument5 pagesHistory of LoggingMudLogggerAUSNo ratings yet
- 1974 - Gervaise - High Precision Survey and Alignment Techniques in Accelerator ConstructionDocument37 pages1974 - Gervaise - High Precision Survey and Alignment Techniques in Accelerator ConstructionVikasNo ratings yet
- Chapter1 PDFDocument7 pagesChapter1 PDFhafedhNo ratings yet
- Logging History Rich With Innovation: Subsurface Data IntegrationDocument4 pagesLogging History Rich With Innovation: Subsurface Data IntegrationAsahel NuñezNo ratings yet
- PetEvalCh1 PDFDocument16 pagesPetEvalCh1 PDFIbtihaj AtiqNo ratings yet
- Royal Observatory, GreenwichDocument2 pagesRoyal Observatory, GreenwichOvidiu AstronomieNo ratings yet
- Mining Subsidence Monitoring Using The Combined Insar and Gps ApproachDocument10 pagesMining Subsidence Monitoring Using The Combined Insar and Gps ApproachJulieth Vanegas MejiaNo ratings yet
- Voids Investigation at Gabbari Tombs, Alexandria, Egypt Using Ground Penetrating Radar TechniqueDocument7 pagesVoids Investigation at Gabbari Tombs, Alexandria, Egypt Using Ground Penetrating Radar TechniquePAssentNo ratings yet
- Sensors 21 05562Document17 pagesSensors 21 05562Jho CamarinesNo ratings yet
- Lemaire Et Al 2020Document20 pagesLemaire Et Al 2020Dilman CzNo ratings yet
- Evolution of Satellite Meteorology: 1.1 Before SatellitesDocument15 pagesEvolution of Satellite Meteorology: 1.1 Before SatellitesSam LawrenceNo ratings yet
- New Technologies in Marine Seismic Surveying: Overview and Physical Modelling ExperimentsDocument9 pagesNew Technologies in Marine Seismic Surveying: Overview and Physical Modelling ExperimentsAmnaTariqNo ratings yet
- Introduction To Petroleum Exploration MethodsDocument7 pagesIntroduction To Petroleum Exploration MethodsHassan AkbarNo ratings yet
- Archaeological Field Survey by Paul Wilkinson 2007Document8 pagesArchaeological Field Survey by Paul Wilkinson 2007ANo ratings yet
- Shooting Seismic Surveys in CirclesDocument14 pagesShooting Seismic Surveys in CirclesRidwanNo ratings yet
- The Development of The Multibeam EchosounderDocument2 pagesThe Development of The Multibeam EchosounderKim Kiki ZaenuriNo ratings yet
- A New Method For Determining Hazardous Roof ConditionsDocument17 pagesA New Method For Determining Hazardous Roof ConditionsrannscribdNo ratings yet
- MDP 39015010937897-18 PDFDocument1 pageMDP 39015010937897-18 PDFMatias AyllonNo ratings yet
- September 21, 1957: NatureDocument2 pagesSeptember 21, 1957: NatureEduardo Fernandez SanchezNo ratings yet
- A Short History of Electrical Techniques in Petroleum ExplorationDocument18 pagesA Short History of Electrical Techniques in Petroleum ExplorationFrank Pérez BoadaNo ratings yet
- The Origins of RadioDocument3 pagesThe Origins of RadioDolanyer Pardo ArancibiaNo ratings yet
- NRL GPS BibliographyDocument163 pagesNRL GPS BibliographyJessica SmithNo ratings yet
- Ford 1914Document25 pagesFord 1914মাহমুদ হাসানNo ratings yet
- GPS Bibliography - Naval Research LaboratoryDocument163 pagesGPS Bibliography - Naval Research LaboratoryU.S. Naval Research LaboratoryNo ratings yet
- Lankston Refraction TR102Document55 pagesLankston Refraction TR102Harold G. Velasquez SanchezNo ratings yet
- The New IASPEI Manual of Seismological Observatory Practice: Seismological Research Letters September 2000Document10 pagesThe New IASPEI Manual of Seismological Observatory Practice: Seismological Research Letters September 2000Bryan NadimpallyNo ratings yet
- Simposio CPTDocument38 pagesSimposio CPTOscar MännlichNo ratings yet
- Does The Underground Sidewall Station Survey Method Meet MHSA Standards?Document11 pagesDoes The Underground Sidewall Station Survey Method Meet MHSA Standards?IamEm B. MoNo ratings yet
- The Evolution of Log Analysis MethodsDocument3 pagesThe Evolution of Log Analysis Methodsvelkus2013No ratings yet
- 2014 Cone Penetration Testing - A Historic Perspective-Libre PDFDocument38 pages2014 Cone Penetration Testing - A Historic Perspective-Libre PDFnjbastosNo ratings yet
- Article Radnav AGRD 63Document232 pagesArticle Radnav AGRD 63Desiree SaliNo ratings yet
- MWAC - Goossens and Offer 2000Document15 pagesMWAC - Goossens and Offer 2000Flavio Emiliano PaparazzoNo ratings yet
- Shooting Seismic Surveys in Circles PDFDocument14 pagesShooting Seismic Surveys in Circles PDFJOSE GNo ratings yet
- SPE-201480-MS High Resolution Reservoir Characterization While Drilling: First Case Study From The Middle East Carbonates With Innovative Multi-Measurement Borehole Imager For Non-Conductive MudDocument16 pagesSPE-201480-MS High Resolution Reservoir Characterization While Drilling: First Case Study From The Middle East Carbonates With Innovative Multi-Measurement Borehole Imager For Non-Conductive MudAnasSalimNo ratings yet
- Keiswetter HammerSource S-TR294Document33 pagesKeiswetter HammerSource S-TR294Ivannia Solano AguilarNo ratings yet
- Seisnotes PDFDocument70 pagesSeisnotes PDFvenkatanagachandraNo ratings yet
- 1 - Refraction Seismology - 1 - 16Document16 pages1 - Refraction Seismology - 1 - 16Junaid AzharNo ratings yet
- 5C - Hyperbolic Navigation SystemDocument96 pages5C - Hyperbolic Navigation SystemVishnu Vijay SNo ratings yet
- NASA Report SR 71Document285 pagesNASA Report SR 71artovolastiNo ratings yet
- Radio Astronomy TelescopeDocument15 pagesRadio Astronomy TelescopePepito El de XatakaNo ratings yet
- An Insight Into The New Austrian Tunnelling Method (NATM)Document14 pagesAn Insight Into The New Austrian Tunnelling Method (NATM)TaiCheong Lee100% (1)
- Tunnel NatmDocument14 pagesTunnel Natmherunugroho699No ratings yet
- Historical Development of The Magnetic Method in ExplorationDocument29 pagesHistorical Development of The Magnetic Method in ExplorationGleizer FerreiraNo ratings yet
- Tech Paper 9Document18 pagesTech Paper 9Jorge Alberto Quiza PolaniaNo ratings yet
- Passive Seismic Monitoring of Reservoirs: A Case Study From OmanDocument10 pagesPassive Seismic Monitoring of Reservoirs: A Case Study From OmanddprosNo ratings yet
- Principles and Applications of VSP in Hydrocarbon ExplorationDocument10 pagesPrinciples and Applications of VSP in Hydrocarbon ExplorationAntarip IndranoojNo ratings yet
- Evolution of Wireline Well-Logging TechniuqeDocument5 pagesEvolution of Wireline Well-Logging Techniuqemahmoud_al_kafajiNo ratings yet
- Geoexploration, 12 (1974) 259-284 o Elsevier Scientific Publishing Company, Amsterdam - Printed in The NetherlandsDocument26 pagesGeoexploration, 12 (1974) 259-284 o Elsevier Scientific Publishing Company, Amsterdam - Printed in The NetherlandsFAJAR SIDIKNo ratings yet
- Underground Cavity 3D Detection Using Laser SystemDocument16 pagesUnderground Cavity 3D Detection Using Laser SystemjilofeNo ratings yet
- 10 3997@1873-0604 2017063 PDFDocument16 pages10 3997@1873-0604 2017063 PDFmahmood jassimNo ratings yet
- CGE 674 CGE 674 CGE 674 CGE 674 Formation Evaluation Formation Evaluation Formation Evaluation Formation EvaluationDocument65 pagesCGE 674 CGE 674 CGE 674 CGE 674 Formation Evaluation Formation Evaluation Formation Evaluation Formation EvaluationNamwangala Rashid NatinduNo ratings yet
- 08.22.2023 - IntroductionDocument27 pages08.22.2023 - IntroductionArush SharmaNo ratings yet
- FRM 61: Forest Surveying and Engineering BS Forestry 2ADocument2 pagesFRM 61: Forest Surveying and Engineering BS Forestry 2ANovie Grace Hicalde TapurocNo ratings yet
- Remotesensing 12 04076 v2Document23 pagesRemotesensing 12 04076 v2Matt HoulsonNo ratings yet
- The Ionosphere: IGY Instruction ManualFrom EverandThe Ionosphere: IGY Instruction ManualW. J. G. BeynonNo ratings yet
- Gravitational Waves: How Einstein's spacetime ripples reveal the secrets of the universeFrom EverandGravitational Waves: How Einstein's spacetime ripples reveal the secrets of the universeRating: 5 out of 5 stars5/5 (2)
- Modeling The Earth For Oil Exploration: Final Report of the CEC's Geoscience I Program 1990-1993From EverandModeling The Earth For Oil Exploration: Final Report of the CEC's Geoscience I Program 1990-1993No ratings yet
- A Treatise on Meteorological Instruments Explanatory of Their Scientific Principles, Method of Construction, and Practical UtilityFrom EverandA Treatise on Meteorological Instruments Explanatory of Their Scientific Principles, Method of Construction, and Practical UtilityNo ratings yet
- Fareq 2014 J. Phys. Conf. Ser. 495 012019Document8 pagesFareq 2014 J. Phys. Conf. Ser. 495 012019jlhunter70No ratings yet
- 12 28 Australia and The GFCDocument62 pages12 28 Australia and The GFCjlhunter70No ratings yet
- LG Beginners Guide To Solar 2018Document16 pagesLG Beginners Guide To Solar 2018Arslan AsgharNo ratings yet
- BitFieldGuide - Drilling Reference - April - 2014 - Web - Ready PDFDocument18 pagesBitFieldGuide - Drilling Reference - April - 2014 - Web - Ready PDFIvanRomanovićNo ratings yet
- WWC Technical Data BookDocument73 pagesWWC Technical Data BookMario BertoneriNo ratings yet
- Hangouts Meet Quick StartDocument1 pageHangouts Meet Quick Startjlhunter70No ratings yet
- Autotorq Hydraulic Chain Pipe Wrench Operation ManualDocument20 pagesAutotorq Hydraulic Chain Pipe Wrench Operation Manualjlhunter70No ratings yet
- Cuttings TransportDocument13 pagesCuttings Transportjlhunter70No ratings yet
- A Guide To Well ConstructionDocument127 pagesA Guide To Well ConstructionbimalbkNo ratings yet
- Dual Rotary Drilling BenefitsDocument20 pagesDual Rotary Drilling Benefitsjlhunter70No ratings yet
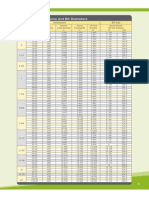
- API Casing Dimensions - Bit DiametersDocument1 pageAPI Casing Dimensions - Bit Diametersjlhunter70No ratings yet
- GBP Statement: Beatriz Manchado FloresDocument2 pagesGBP Statement: Beatriz Manchado Floresmr.laravelNo ratings yet
- THESISDocument21 pagesTHESISMell Heiston GensonNo ratings yet
- Filipino ThinkingDocument2 pagesFilipino ThinkingRheyven JuanNo ratings yet
- jOB aNALYSIS POWERPOINTDocument34 pagesjOB aNALYSIS POWERPOINTdushyant12288No ratings yet
- Nelson 2010 StructuralDocument51 pagesNelson 2010 StructuralGustavo Mateo100% (1)
- A330 RR Trent 700 Technical Training Manual General Familiarization Course - T4 General Level 1Document68 pagesA330 RR Trent 700 Technical Training Manual General Familiarization Course - T4 General Level 1Owen100% (2)
- Ces511 - Structural Engineering Laboratory Lab Experiment: Bending Moment and Shear Force in Beams (Co2:Po5)Document13 pagesCes511 - Structural Engineering Laboratory Lab Experiment: Bending Moment and Shear Force in Beams (Co2:Po5)elhammeNo ratings yet
- List of Engineering Colleges in PakistanDocument7 pagesList of Engineering Colleges in PakistanFahad Bin ImtiazNo ratings yet
- Ground Effect Aerodynamics PDFDocument12 pagesGround Effect Aerodynamics PDFChegrani Ahmed100% (1)
- MKTED208071EN CatalogueDocument618 pagesMKTED208071EN Cataloguecarlos augustoNo ratings yet
- Creative FRP Design GuideDocument255 pagesCreative FRP Design GuideVincenzo Praturlon100% (1)
- Instruction Manual FisherDocument20 pagesInstruction Manual FisherPrado_MoisesNo ratings yet
- Stuart Hall - Who Dares, FailsDocument3 pagesStuart Hall - Who Dares, FailsdNo ratings yet
- TEST PearsonsDocument4 pagesTEST Pearsonsazertytyty000No ratings yet
- Cablemaster RLC - ManualDocument8 pagesCablemaster RLC - ManualGlendinning Products, LLC.No ratings yet
- SACS TrainingDocument4 pagesSACS Trainingasma100% (1)
- SMPS FundamentalsDocument53 pagesSMPS FundamentalsRahul Gupta100% (2)
- NCh204 1977Document15 pagesNCh204 1977Cristian A. Rivera S.No ratings yet
- 6 Lifetime Extension Through PDFDocument10 pages6 Lifetime Extension Through PDFdavih007No ratings yet
- Solidworks Inspection Data SheetDocument3 pagesSolidworks Inspection Data Sheetradule021No ratings yet
- BEE MCQ Unit IVDocument16 pagesBEE MCQ Unit IVUmesh PatilNo ratings yet
- English: Quarter 2 - Module 1 Listening Strategies Based On Purpose, Familiarity With The Topic, and Levels of DifficultyDocument24 pagesEnglish: Quarter 2 - Module 1 Listening Strategies Based On Purpose, Familiarity With The Topic, and Levels of DifficultyMary Ysalina100% (3)
- A Simple Guide To Energy Budgets: Number 167 WWW - Curriculum-Press - Co.ukDocument4 pagesA Simple Guide To Energy Budgets: Number 167 WWW - Curriculum-Press - Co.ukKamaria ThomasNo ratings yet
- The Problem of Authenticity or External CriticismDocument30 pagesThe Problem of Authenticity or External CriticismKen StarNo ratings yet
- What I Have Learned: MODULE 2: Stand On Issues Supported by Factual EvidencesDocument3 pagesWhat I Have Learned: MODULE 2: Stand On Issues Supported by Factual EvidencesJc Tan GallanoNo ratings yet
- Assignment 5 - PersonalityDocument1 pageAssignment 5 - PersonalityLavesh SethiaNo ratings yet