You might also like
- Theory and Analysis of Continuous BeamsDocument27 pagesTheory and Analysis of Continuous BeamsNeil Hislop91% (35)
- Malaisie - DID Manual - Volume 6 - Geotechnical Manual, Site Investigation and SurveyDocument513 pagesMalaisie - DID Manual - Volume 6 - Geotechnical Manual, Site Investigation and Surveyscribd_geotec100% (1)
- FDS Verification Guide PDFDocument262 pagesFDS Verification Guide PDFBi8ikity100% (1)
- EN 647 - Distributed Generation and MicrogridsDocument53 pagesEN 647 - Distributed Generation and MicrogridsSumeet MehardaNo ratings yet
- A Course of Mathematics for Engineerings and Scientists: Volume 5From EverandA Course of Mathematics for Engineerings and Scientists: Volume 5No ratings yet
- Stable Numerical Schemes for Fluids, Structures and their InteractionsFrom EverandStable Numerical Schemes for Fluids, Structures and their InteractionsNo ratings yet
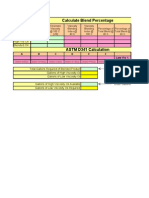
- Viscosity Blend CalculatorDocument2 pagesViscosity Blend Calculatorelmis123123100% (1)
- Summ Ability of Positive Sequences and Sub SequencesDocument18 pagesSumm Ability of Positive Sequences and Sub SequencesMaria Jose de las mercedes Costa AzulNo ratings yet
- Seml Yen 1975Document11 pagesSeml Yen 1975AndersonNo ratings yet
- Periodic Nonlinear Schrδdinger EquationDocument26 pagesPeriodic Nonlinear Schrδdinger EquationGilberto JarvioNo ratings yet
- Joint Uncertainty Assessment With A Combined Bayesian Updating/LU/P-Field ApproachDocument6 pagesJoint Uncertainty Assessment With A Combined Bayesian Updating/LU/P-Field ApproachAriel ZúñigaNo ratings yet
- Acusolve Turb Validation PDFDocument7 pagesAcusolve Turb Validation PDFEric ToroNo ratings yet
- Cbcilt: Sçäk FFDocument112 pagesCbcilt: Sçäk FFDaniel SalasNo ratings yet
- Density-Dependent Leslie Matrix Modeling For Logistic Populations With Steady-State Distribution ControlDocument15 pagesDensity-Dependent Leslie Matrix Modeling For Logistic Populations With Steady-State Distribution Controlsongpengyuan123No ratings yet
- Critical: Expanents Far Branching Annihilating Randem An NumberDocument11 pagesCritical: Expanents Far Branching Annihilating Randem An NumberTainã LaíseNo ratings yet
- Well-Defined Stochastic Petri NetsDocument7 pagesWell-Defined Stochastic Petri NetsssfofoNo ratings yet
- Applied Mathematics and Computation: Gheorghe ArdeleanDocument8 pagesApplied Mathematics and Computation: Gheorghe ArdeleanJunaid AhmadNo ratings yet
- Entropy: Entropic Uncertainty Relations Via Direct-Sum Majorization Relation For Generalized MeasurementsDocument14 pagesEntropy: Entropic Uncertainty Relations Via Direct-Sum Majorization Relation For Generalized MeasurementsPudretexDNo ratings yet
- Accepted Manuscript: Applied Numerical MathematicsDocument29 pagesAccepted Manuscript: Applied Numerical MathematicsAmine LwexNo ratings yet
- Validating Default ProbabilitiesDocument11 pagesValidating Default ProbabilitiesIslaCanelaNo ratings yet
- 2016 ANM Ranga Vol109Document22 pages2016 ANM Ranga Vol109SwaminathanNo ratings yet
- Near Optimal Thresholding Estimation of A Poisson Intensity On The Real LineDocument36 pagesNear Optimal Thresholding Estimation of A Poisson Intensity On The Real LineEduardo Salgado EnríquezNo ratings yet
- K-Faraz Et Al Sci-Rep (2021) REVISED SupplInfoDocument17 pagesK-Faraz Et Al Sci-Rep (2021) REVISED SupplInfoSuganthi GaneshNo ratings yet
- Hoffman 2017Document12 pagesHoffman 2017Jonathan TeixeiraNo ratings yet
- 7 7 Lu LaffanDocument13 pages7 7 Lu LaffanO maninho do açoNo ratings yet
- An Automatic Newton-Raphson SchemeDocument32 pagesAn Automatic Newton-Raphson SchemeVirginie ChalonNo ratings yet
- Capitulo 4 Primera EdicionDocument29 pagesCapitulo 4 Primera EdicionShey HuarcayaNo ratings yet
- 1996.Peters.A Look at Dispersion in Porous Media Through Computed Tomography ImagingDocument9 pages1996.Peters.A Look at Dispersion in Porous Media Through Computed Tomography ImagingAlysson DiógenesNo ratings yet
- My PHD ThesisDocument163 pagesMy PHD ThesisTerhemen AboiyarNo ratings yet
- 2D Modelling of The Consolidation of SoilDocument13 pages2D Modelling of The Consolidation of SoilRobert PrinceNo ratings yet
- Applied Mathematics and MechanicsDocument10 pagesApplied Mathematics and Mechanicsinam vfNo ratings yet
- Laboratory For Information and Decision Systems, Massachusetts Institute of Technology, Canibridge, MA 02139, U.S.ADocument14 pagesLaboratory For Information and Decision Systems, Massachusetts Institute of Technology, Canibridge, MA 02139, U.S.Aarun_kejariwalNo ratings yet
- An Observational Method For Consolidation Analysis of The PVD-improved SubsoilDocument9 pagesAn Observational Method For Consolidation Analysis of The PVD-improved Subsoiltriple tripleNo ratings yet
- Popov PPM GazDocument20 pagesPopov PPM GazilyesingenieurNo ratings yet
- 19Document22 pages19Chế LinhNo ratings yet
- Type II Settling Data AnalysisDocument4 pagesType II Settling Data AnalysisDiego Alejandro Pulgarin MontoyaNo ratings yet
- Time-Frequency Analysis of Locally Stationary Hawkes ProcessesDocument31 pagesTime-Frequency Analysis of Locally Stationary Hawkes ProcessesPerson PersonsNo ratings yet
- Statistical ApplicationDocument18 pagesStatistical ApplicationArqam AbdulaNo ratings yet
- The Projection Method For The Incompressible Navier-Stokes Equations: The Pressure Near A No-Slip WallDocument27 pagesThe Projection Method For The Incompressible Navier-Stokes Equations: The Pressure Near A No-Slip WallSahar NasrallahNo ratings yet
- An Autoregressive Distributed Lag Modelling Approach To Cointegration AnalysisDocument33 pagesAn Autoregressive Distributed Lag Modelling Approach To Cointegration AnalysisNuur AhmedNo ratings yet
- Society For Industrial and Applied MathematicsDocument4 pagesSociety For Industrial and Applied Mathematicsyaazhini siddharthNo ratings yet
- Pesaran - Shin - An Auto Regressive Distributed Lag Modelling Approach To Cointegration AnalysisDocument33 pagesPesaran - Shin - An Auto Regressive Distributed Lag Modelling Approach To Cointegration AnalysisrunawayyyNo ratings yet
- Article SDE PKPDDocument25 pagesArticle SDE PKPDthyagosmesmeNo ratings yet
- Symmetric Unimodal Models For Directional Data MotDocument18 pagesSymmetric Unimodal Models For Directional Data Motwill bNo ratings yet
- Error Propagation of General Linear Methods For Ordinary Differential EquationsDocument21 pagesError Propagation of General Linear Methods For Ordinary Differential EquationsKarangano Kamaraju Castro ChavezNo ratings yet
- ZIB ReportDocument16 pagesZIB ReportAlekseyevich GagarinNo ratings yet
- Finite Strain Theory of Consolidation of Clays: Finite Volume ApproachDocument5 pagesFinite Strain Theory of Consolidation of Clays: Finite Volume ApproachKTMONo ratings yet
- Mona SCH YfytitycDocument7 pagesMona SCH YfytitycJeevananthan S P KannanNo ratings yet
- JCP - 1 PrinciplDocument35 pagesJCP - 1 PrinciplVrayan AyalaNo ratings yet
- Finding Two-Dimensional Peaks: Physics of Elementary Particles and Atomic Nucleus. ExperimentDocument8 pagesFinding Two-Dimensional Peaks: Physics of Elementary Particles and Atomic Nucleus. ExperimentsilagadzeNo ratings yet
- 1208.0177 Gouy-Stodola Theorem As A Variational Principle For Open Systems.Document16 pages1208.0177 Gouy-Stodola Theorem As A Variational Principle For Open Systems.Elzimar Freitas100% (1)
- 04 Mahalanobis Distance in RDocument12 pages04 Mahalanobis Distance in REduardoPacaNo ratings yet
- High-Order Discontinuous Galerkin Methods For CFD: March 2011Document33 pagesHigh-Order Discontinuous Galerkin Methods For CFD: March 2011ZhifengNo ratings yet
- Non Linear MLPGDocument15 pagesNon Linear MLPGJemi JollyNo ratings yet
- Robust Location Estimators For The Xbar Control Chart - JQT - 2011 PDFDocument17 pagesRobust Location Estimators For The Xbar Control Chart - JQT - 2011 PDFCarlos Dario CristianoNo ratings yet
- Life Table AnalysisDocument13 pagesLife Table AnalysisYusfida Mariatul HusnaNo ratings yet
- Gatica Inzunza 4 PUBLISHEDDocument8 pagesGatica Inzunza 4 PUBLISHEDBenja Venegas SolisNo ratings yet
- An Assessment Ofthe Conventional Cake "Ltration Theory: Chi Tien, Renbi BaiDocument14 pagesAn Assessment Ofthe Conventional Cake "Ltration Theory: Chi Tien, Renbi BaiJohn BongusNo ratings yet
- On The Implementation of The 0-1 Test For Chaos: Georg A. Gottwald Ian MelbourneDocument22 pagesOn The Implementation of The 0-1 Test For Chaos: Georg A. Gottwald Ian Melbourneherwins.stocksNo ratings yet
- Dong 等 - 2023 - Convergence to Nonlinear Diffusion Waves for SolutDocument37 pagesDong 等 - 2023 - Convergence to Nonlinear Diffusion Waves for Solutzinnia.romyeeNo ratings yet
- Spectral Tests of Randomness For Spatial Point Patterns: Moiraa - Mugglestone AndericrenshawDocument15 pagesSpectral Tests of Randomness For Spatial Point Patterns: Moiraa - Mugglestone AndericrenshawHiep NguyenNo ratings yet
- 1586746168particle Swarm OptimizationDocument5 pages1586746168particle Swarm OptimizationDkicksNo ratings yet
- Blowup Solutions and Their Blowup Rates For ParaboDocument11 pagesBlowup Solutions and Their Blowup Rates For ParaboChương Quách VănNo ratings yet
- Preconditioned Descent Algorithms For P-LaplacianDocument21 pagesPreconditioned Descent Algorithms For P-Laplacianalejandro.david1642No ratings yet
- Rhie ChowDocument33 pagesRhie ChowJavier Conesa OutedaNo ratings yet
- AMP Model Question PaperDocument3 pagesAMP Model Question Paperelson_paulNo ratings yet
- 04 - Borehole Geophysics PDFDocument12 pages04 - Borehole Geophysics PDFalvaro MNo ratings yet
- CEG 801 - Advanced Engineering Maths 3Document57 pagesCEG 801 - Advanced Engineering Maths 3Daniel InemughaNo ratings yet
- Energy, Energy Transfer, and General Energy Analysis: Thermodynamics: An Engineering Approach, 6 EditionDocument10 pagesEnergy, Energy Transfer, and General Energy Analysis: Thermodynamics: An Engineering Approach, 6 EditionJeff HardyNo ratings yet
- ME 215 Notes Package - 2023Document118 pagesME 215 Notes Package - 2023Oluwatomi OluwafemiNo ratings yet
- Lab Report SFGDocument11 pagesLab Report SFGfatin azuraNo ratings yet
- Problem Set 1Document4 pagesProblem Set 1Ken Rubio0% (1)
- Ass 11Document1 pageAss 11Hawraa AlbahadlyNo ratings yet
- Design, Fabrication, and Characterization of Carbon Nanotube Field Emission Devices For Advanced ApplicationsDocument254 pagesDesign, Fabrication, and Characterization of Carbon Nanotube Field Emission Devices For Advanced ApplicationssamerNo ratings yet
- SURFACE TENSION OF PURE LIQUIDS AND SOLUTIONS Lab Report (Bacsarpa, XJ)Document7 pagesSURFACE TENSION OF PURE LIQUIDS AND SOLUTIONS Lab Report (Bacsarpa, XJ)Xena Jenn Y. BacsarpaNo ratings yet
- UEEA 1243 - Circuit TheoryDocument28 pagesUEEA 1243 - Circuit TheoryDaniel LohNo ratings yet
- Ansys Icepak BrochureDocument4 pagesAnsys Icepak Brochurejagadees21No ratings yet
- Interference QuestionsDocument11 pagesInterference QuestionsKhaled SaadiNo ratings yet
- Electrostatics: (Physics)Document6 pagesElectrostatics: (Physics)Piyush GuptaNo ratings yet
- A Textbook of Electronic Circuits - R. S. SedhaDocument188 pagesA Textbook of Electronic Circuits - R. S. SedhaTwishaNo ratings yet
- Chemistry Books: S.No Authors /publisher Name of Books RemarksDocument13 pagesChemistry Books: S.No Authors /publisher Name of Books RemarksAnonymous FckLmgFyNo ratings yet
- UNIT-1 Fixed and Continuous Beams 1.1) IntroductionDocument4 pagesUNIT-1 Fixed and Continuous Beams 1.1) IntroductionJohn CenaNo ratings yet
- 9th Class Chapter 4 Chemistry Notes Sindh BoardDocument4 pages9th Class Chapter 4 Chemistry Notes Sindh BoardmotivonovaNo ratings yet
- Modeling of Armature & Field Controlled DC MOTOR in SimulinkDocument4 pagesModeling of Armature & Field Controlled DC MOTOR in SimulinkSuprapto Chao JiNo ratings yet
- Robot Dynamics Exercise 1b SolutionDocument8 pagesRobot Dynamics Exercise 1b SolutionMunzir QadriNo ratings yet
- Delhi Public School RK Puram Holidays Homework (2021-22) Class IX-PhysicsDocument2 pagesDelhi Public School RK Puram Holidays Homework (2021-22) Class IX-PhysicsjanviNo ratings yet
- Computational ElectromagneticsDocument3 pagesComputational ElectromagneticsInnovative Research PublicationsNo ratings yet
- What Is HydraulicsDocument6 pagesWhat Is HydraulicsAnonymous qq1gpapgNo ratings yet
- Flare Stack Design PDF ReportDocument2 pagesFlare Stack Design PDF Reportrutuja100% (2)