You might also like
- Handbook of Heating, Ventilating and Air ConditioningFrom EverandHandbook of Heating, Ventilating and Air ConditioningRating: 4 out of 5 stars4/5 (6)
- What Is PID ControlDocument52 pagesWhat Is PID ControlShivaji Thube100% (1)
- Control SystemDocument52 pagesControl SystemRana KashifNo ratings yet
- Thermal Bypass ValveDocument4 pagesThermal Bypass ValveRamu PamuruNo ratings yet
- Molliers Chart & Refrigerant PropertiesDocument55 pagesMolliers Chart & Refrigerant PropertiesRodrigo GomezNo ratings yet
- 12 - Lab6 - Heat ExchangerDocument14 pages12 - Lab6 - Heat ExchangerHussain MagarNo ratings yet
- Heat Exchanger: 5.1: Types of Heat ExchangersDocument34 pagesHeat Exchanger: 5.1: Types of Heat Exchangersamirul ashrafNo ratings yet
- Process Control in Chemical Engineering: Agung Nugroho Universitas PertaminaDocument23 pagesProcess Control in Chemical Engineering: Agung Nugroho Universitas PertaminaShilpya KurniasihNo ratings yet
- 06 Mechanical Heat PumpDocument9 pages06 Mechanical Heat Pumpمحمد منذر رضاNo ratings yet
- Adaptative SuperheatDocument6 pagesAdaptative Superheatgustavo peñarandaNo ratings yet
- CPE 664 Design Project 2 Design ProjectDocument120 pagesCPE 664 Design Project 2 Design Projectsuhel ahmadNo ratings yet
- Energy Audit Methodology For FOR Turbine Cycle: M.V.Pande Dy - Director NPTI, NagpurDocument33 pagesEnergy Audit Methodology For FOR Turbine Cycle: M.V.Pande Dy - Director NPTI, NagpurPeddi Raja Mohan100% (1)
- Turbine Section revAJUDocument18 pagesTurbine Section revAJUyoyoNo ratings yet
- Energy Audit Methology For Turbine Cycle - M.V. Pande & Dy - Director PDFDocument33 pagesEnergy Audit Methology For Turbine Cycle - M.V. Pande & Dy - Director PDFtolga ALTINTAŞ100% (1)
- 4 EA Turbine CycleDocument33 pages4 EA Turbine Cycleemre gedikliNo ratings yet
- Energy Audit Methodology For FOR Turbine Cycle: M.V.Pande Dy - Director NPTI, NagpurDocument33 pagesEnergy Audit Methodology For FOR Turbine Cycle: M.V.Pande Dy - Director NPTI, NagpurVishal Kumar100% (1)
- Experiment No. 1Document4 pagesExperiment No. 1subhamgupta7495100% (1)
- Closed Loop Exercise 2017-30Document2 pagesClosed Loop Exercise 2017-30Heriberto HernandezNo ratings yet
- Thermal Engineering Lab and HeatDocument87 pagesThermal Engineering Lab and Heatsaadzamel67No ratings yet
- Prac 3 Without AnswersDocument3 pagesPrac 3 Without AnswersTitsarosal ThomasNo ratings yet
- Power GenerationDocument120 pagesPower GenerationAnurag porte100% (2)
- Imeko TC12 2004 PL 005Document10 pagesImeko TC12 2004 PL 005junkcanNo ratings yet
- Energy Audit Methodology For For Turbine Cycle: S.V.Malpe Dy - Director NPTI, NagpurDocument34 pagesEnergy Audit Methodology For For Turbine Cycle: S.V.Malpe Dy - Director NPTI, Nagpurs anil kumar tatithuri100% (2)
- Unit Hot Start Up Check List: For 5 MinutesDocument7 pagesUnit Hot Start Up Check List: For 5 MinutesShift Incharge BrbclNo ratings yet
- Data Pengamatan He-1Document7 pagesData Pengamatan He-1izmaNo ratings yet
- Group AssignmentDocument30 pagesGroup AssignmentmiexaraNo ratings yet
- Performance 2 (Cascade Control)Document4 pagesPerformance 2 (Cascade Control)Jorge Chávez BarbozaNo ratings yet
- AHUDocument62 pagesAHUhanyassawyNo ratings yet
- Revised-HT lab-Record-AUGUST-2023Document61 pagesRevised-HT lab-Record-AUGUST-2023Satwik SahuNo ratings yet
- Experiment 4 Cross Flow Heat ExchangerDocument19 pagesExperiment 4 Cross Flow Heat Exchangerbeasturs1No ratings yet
- Department of Mechanical Engineering Refrigeration & Air Conditioning Lab Vapour Compression Unit AimDocument7 pagesDepartment of Mechanical Engineering Refrigeration & Air Conditioning Lab Vapour Compression Unit AimGaurav KhamesraNo ratings yet
- Heat Transfer in Concentric Shell Tube Heat Exchnager: MIN 500 Instrumentation and Experimental MethodsDocument8 pagesHeat Transfer in Concentric Shell Tube Heat Exchnager: MIN 500 Instrumentation and Experimental MethodsDevendra SharmaNo ratings yet
- Heat Transfer Lab ManualDocument60 pagesHeat Transfer Lab ManualSMIT CHRISTIAN100% (1)
- 04 - Analyze OverviewDocument28 pages04 - Analyze OverviewMohd Hafiq FirdausNo ratings yet
- Metal RodDocument65 pagesMetal RodVidhya NairNo ratings yet
- Turbojet-Performance AnalysisDocument6 pagesTurbojet-Performance AnalysisRajath ShettyNo ratings yet
- Process Control-Lecture 03Document21 pagesProcess Control-Lecture 03mwamba chandaNo ratings yet
- © Career Avenues A1Document160 pages© Career Avenues A1Nomee PatelNo ratings yet
- TP Heat Exchanger HT31Document4 pagesTP Heat Exchanger HT31abdel100% (1)
- Experiment No 11Document5 pagesExperiment No 11Muhammad Zohaib ShahidNo ratings yet
- Piping and Instrumentation Diagram: Nama Alat Kode Fungsi Memanaskan Suhu Umpan Nafta Sebelum Masuk Reaktor I H-101Document6 pagesPiping and Instrumentation Diagram: Nama Alat Kode Fungsi Memanaskan Suhu Umpan Nafta Sebelum Masuk Reaktor I H-101Rusma YantiNo ratings yet
- 9 FOPH Log BookDocument2 pages9 FOPH Log BookmkoelrealNo ratings yet
- Practical GuideDocument10 pagesPractical GuideDamaris ThamiNo ratings yet
- System Automatic Control Level Dan Temperature Dearator: Pt. Multi Ganda ScoteknikDocument18 pagesSystem Automatic Control Level Dan Temperature Dearator: Pt. Multi Ganda ScoteknikichsanNo ratings yet
- DVM+S+Sequence+of+Operations V1.2 12202018 PDFDocument83 pagesDVM+S+Sequence+of+Operations V1.2 12202018 PDFelshan_asgarovNo ratings yet
- Logsheet NewDocument10 pagesLogsheet Newfebypn8No ratings yet
- Modeling of The German National StandardDocument8 pagesModeling of The German National StandardsalemNo ratings yet
- Temperature Control: On-Off ControllerDocument9 pagesTemperature Control: On-Off Controllerdivyansh kashyapNo ratings yet
- Gas Turbine & Combined Cycle BasicsDocument37 pagesGas Turbine & Combined Cycle BasicsSurya Meena100% (1)
- HMBD Review Check ListDocument4 pagesHMBD Review Check Listctraminst_81No ratings yet
- Boiling Heat TransferDocument3 pagesBoiling Heat TransferAyush DubeyNo ratings yet
- Refrigeration UnitDocument6 pagesRefrigeration UnitNur Amira JasminNo ratings yet
- Cascade ControlDocument10 pagesCascade ControlManoj RajagopalanNo ratings yet
- Heat Transfer Lab - Cycle2-1Document24 pagesHeat Transfer Lab - Cycle2-1Prashanth 2601No ratings yet
- Le:Trial On Diesel Engine To Determine Variable: Load Performance and Energy BalanceDocument3 pagesLe:Trial On Diesel Engine To Determine Variable: Load Performance and Energy BalanceKhaire SushomNo ratings yet
- Heat Transfer Lab ManualDocument28 pagesHeat Transfer Lab ManualAmir NITNo ratings yet
- 1 s2.0 S0735193305001041 MainDocument9 pages1 s2.0 S0735193305001041 MainAndika RivaldiNo ratings yet
- Air Conditoner Test Rig1Document3 pagesAir Conditoner Test Rig1Kiran KumarNo ratings yet
- Control and Instrumentation of Chemical ProcessesDocument38 pagesControl and Instrumentation of Chemical ProcessesdioniewilsonatyahooNo ratings yet
- Process Control SchemesDocument19 pagesProcess Control SchemesMohd RezalNo ratings yet
- Case Study: CSTR StabilizationDocument8 pagesCase Study: CSTR StabilizationΜιχάλης ΝικολάουNo ratings yet
- Using Feedback On Symptomatic Infections To Contain The Coronavirus Epidemic: Insight From A SPIR ModelDocument5 pagesUsing Feedback On Symptomatic Infections To Contain The Coronavirus Epidemic: Insight From A SPIR ModelΜιχάλης ΝικολάουNo ratings yet
- Case Study: CSTR Dynamics Via Linearization: 1. Representation of Multivariable SystemsDocument8 pagesCase Study: CSTR Dynamics Via Linearization: 1. Representation of Multivariable SystemsΜιχάλης ΝικολάουNo ratings yet
- Feedforward Cascade ControlDocument10 pagesFeedforward Cascade ControlΜιχάλης ΝικολάουNo ratings yet
- Panera NutritionDocument13 pagesPanera NutritionΜιχάλης ΝικολάουNo ratings yet
- Lect. 1 Lect. 3 Lect. 5: No Class Exam 1 Exam 2 FinalDocument1 pageLect. 1 Lect. 3 Lect. 5: No Class Exam 1 Exam 2 FinalΜιχάλης ΝικολάουNo ratings yet
- CHEE 1131 Presentation Energy Oct 29 2013 PDFDocument72 pagesCHEE 1131 Presentation Energy Oct 29 2013 PDFΜιχάλης ΝικολάουNo ratings yet
- Dell-U2713hm User's Guide En-UsDocument60 pagesDell-U2713hm User's Guide En-UssmashdwarfNo ratings yet
- Rice Map PDFDocument1 pageRice Map PDFΜιχάλης ΝικολάουNo ratings yet
- Notes Cauchy-Schwarz Meet Heisenberg PDFDocument6 pagesNotes Cauchy-Schwarz Meet Heisenberg PDFΜιχάλης ΝικολάουNo ratings yet
- SPE Predictive Maintenance InventionDocument2 pagesSPE Predictive Maintenance InventionΜιχάλης ΝικολάουNo ratings yet
- MFG of Liquid Bromine (In Brief) :-: Raw MaterialsDocument17 pagesMFG of Liquid Bromine (In Brief) :-: Raw MaterialsChakuliNo ratings yet
- Catalogo Notifier 8Document2 pagesCatalogo Notifier 8Ali HadiNo ratings yet
- TEAM fEASIBILITYDocument2 pagesTEAM fEASIBILITYPk NimiwalNo ratings yet
- ECA-00-PCS-SPE-0011 - Rev3-INSTRUMENTATION FOR PACKAGED EQUIPMENTDocument19 pagesECA-00-PCS-SPE-0011 - Rev3-INSTRUMENTATION FOR PACKAGED EQUIPMENThcsharma1967No ratings yet
- 7-Liquid Level ControlDocument83 pages7-Liquid Level ControlJaneider GomezNo ratings yet
- Process Control Narratives: NEORSD Design StandardDocument1 pageProcess Control Narratives: NEORSD Design StandardRaviNo ratings yet
- A Book Review: Master of Arts in NursingDocument20 pagesA Book Review: Master of Arts in NursingK EV INNo ratings yet
- Ingenieria de ControlesDocument91 pagesIngenieria de ControlesJulio César Millán BarcoNo ratings yet
- AlfaLaval EPC41 Unidad de ControlDocument28 pagesAlfaLaval EPC41 Unidad de ControlAlvaro beltran reinoso100% (1)
- 01 Introduction To Process ControlDocument35 pages01 Introduction To Process ControlJohn DanielNo ratings yet
- Gas Compression Control SystemsDocument45 pagesGas Compression Control SystemsarielNo ratings yet
- TS00E v1.2 Student Noteset PDFDocument303 pagesTS00E v1.2 Student Noteset PDFpatrick morris100% (1)
- 1 Process Dynamics and Control No1Document32 pages1 Process Dynamics and Control No1Ayushi100% (1)
- BF610Document4 pagesBF610Prasad KulkarniNo ratings yet
- Lab Manual Process Control GCUF-1Document19 pagesLab Manual Process Control GCUF-1bilal akbarNo ratings yet
- Process Control: Designing Process and Control Systems For Dynamic PerformanceDocument32 pagesProcess Control: Designing Process and Control Systems For Dynamic PerformanceMaximiliano AndreiNo ratings yet
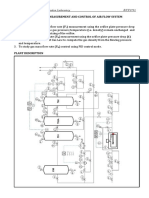
- Experiment 3: Measurement and Control of Air Flow System ObjectiveDocument4 pagesExperiment 3: Measurement and Control of Air Flow System ObjectivePMNo ratings yet
- Icci1000 2019Document179 pagesIcci1000 2019Vy ThoaiNo ratings yet
- Diagram For Understanding Chemical ProcessesDocument4 pagesDiagram For Understanding Chemical ProcessesPlay DineNo ratings yet
- PID ModesTraining LabVoltDocument34 pagesPID ModesTraining LabVoltRiccardo VianelloNo ratings yet
- Lab3 ReviseDocument9 pagesLab3 ReviseAmar Baihaqi Bin MuhamadNo ratings yet
- 01 Industrial Automation ControllersDocument29 pages01 Industrial Automation ControllersNirjhar BhatnaagarNo ratings yet
- Harmonized Automation System - Dependable Open: FeaturesDocument4 pagesHarmonized Automation System - Dependable Open: Featuresarun mathewNo ratings yet
- Dcs SpecificationDocument42 pagesDcs SpecificationDjamel EeddinNo ratings yet
- 2023 PCI360S Introductory ConceptsDocument19 pages2023 PCI360S Introductory ConceptsSifanele PotwanaNo ratings yet
- M103 Wincad Engineering Software Tools: Course DescriptionDocument2 pagesM103 Wincad Engineering Software Tools: Course DescriptionRizky MuhammadNo ratings yet
- Classroom Courses: Process Automation Learning ServicesDocument136 pagesClassroom Courses: Process Automation Learning ServicesTeddy PahlewiNo ratings yet
- Chapter 1Document17 pagesChapter 1Ahmed Hassan RashedNo ratings yet
- Process Control PPT 1901Document39 pagesProcess Control PPT 1901Ashish DhimanNo ratings yet