You might also like
- L3 Hansbo GradedDocument3 pagesL3 Hansbo GradedTimmy NgoNo ratings yet
- Losningsforslag Nexus B 2-2 Mekaniska VagorDocument13 pagesLosningsforslag Nexus B 2-2 Mekaniska VagorblodisenNo ratings yet
- Tentamen Losningar 1403420.pdf1268081559Document14 pagesTentamen Losningar 1403420.pdf1268081559José SanchesNo ratings yet
- U Losn96Document4 pagesU Losn96Epic WinNo ratings yet
- Axlar KilremmarDocument36 pagesAxlar KilremmarFiräs SahliNo ratings yet
- Moment Viktiga Exempel ÖvningsuppgifterDocument6 pagesMoment Viktiga Exempel Övningsuppgifterشاب مسلم سني لحما دماNo ratings yet
- Exempelsamling FTF2010Document23 pagesExempelsamling FTF2010Jonathan LindgrenNo ratings yet
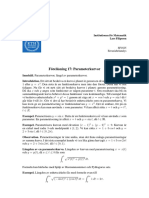
- Forelasning17 PDFDocument2 pagesForelasning17 PDFSession Ender of Andërs Falacy mcnussionNo ratings yet
- Losningsforslag Nexus B 4-2 Elektromagnetiska VagorDocument11 pagesLosningsforslag Nexus B 4-2 Elektromagnetiska VagorblodisenNo ratings yet
- Tata42 Fo14Document12 pagesTata42 Fo14ydc7wn68fkNo ratings yet
- Laboration CDocument16 pagesLaboration CBala SadikNo ratings yet
- Partiella DifferentialekvationerDocument19 pagesPartiella DifferentialekvationerpungkukNo ratings yet
- FyB TEN2 - 3 - 2014 - 08 - 14 PDFDocument8 pagesFyB TEN2 - 3 - 2014 - 08 - 14 PDFAngel GarciaNo ratings yet
- Rep 2a - Y-BokenDocument3 pagesRep 2a - Y-Bokenapi-420901676No ratings yet
- g3p8 10Document6 pagesg3p8 10RENZO RANIEIRO CHUMPITASI SANTANANo ratings yet
- Kapitel 2 Matematik 3cDocument18 pagesKapitel 2 Matematik 3cMagnus GyllenfjäderNo ratings yet
- MatematikuppgifterDocument2 pagesMatematikuppgifterAlex MinuiNo ratings yet
- Fysmatte SammanfattningDocument8 pagesFysmatte SammanfattningLinnéa Marion Brenden LinnaNo ratings yet
- Polynom 19Document3 pagesPolynom 19jakobNo ratings yet
- Mild Solutions For Nonlinear Evolution EquationsDocument63 pagesMild Solutions For Nonlinear Evolution EquationsMåns WilliamsonNo ratings yet
- Fysik 2 Uppdrag 1Document4 pagesFysik 2 Uppdrag 1Merry KasgergesNo ratings yet
- Gradient ExtremvardenDocument15 pagesGradient Extremvardencsgo.smurfen00No ratings yet
- Teknisk BalkteoriDocument7 pagesTeknisk BalkteorisoulsellNo ratings yet
- Fysik 1a Inlämining Av Uppdrag 2Document7 pagesFysik 1a Inlämining Av Uppdrag 2المسلم مع المسلمينNo ratings yet
- Annotated-Förstudie Uppgift 12 Z21 Z23Document11 pagesAnnotated-Förstudie Uppgift 12 Z21 Z23erik perssonNo ratings yet
- SK OrstenDocument4 pagesSK OrstenHej SanNo ratings yet
- Ma 4 Uppdrag 1Document9 pagesMa 4 Uppdrag 1X770 GamingNo ratings yet
- Labb2 TeoriDocument2 pagesLabb2 TeoriLinq Korre100% (1)
- Theory Multi - Var CalculusDocument49 pagesTheory Multi - Var CalculusjohanNo ratings yet
- Föreläsning 5 - 2023Document44 pagesFöreläsning 5 - 2023johanskarin94No ratings yet
- Matmat 03c U 3 170911 Matematik 3c InlamningDocument11 pagesMatmat 03c U 3 170911 Matematik 3c InlamningLamin SonkoNo ratings yet
- Kalkulus AkuDocument77 pagesKalkulus AkuGalih Yudha Wahyu SaputraNo ratings yet
- TvärkraftsbärförmågaDocument17 pagesTvärkraftsbärförmågaMa HaNo ratings yet
- Tenta Jan 2010 SolutionsDocument5 pagesTenta Jan 2010 Solutionsusr_kotoNo ratings yet
- Facit Diagnostiskt Prov - 2 - Fy2Document12 pagesFacit Diagnostiskt Prov - 2 - Fy2Hayat AodiNo ratings yet
- Lab 3Document11 pagesLab 3svebiliusNo ratings yet
- Seminarium 4 2019Document2 pagesSeminarium 4 2019Alva SidestamNo ratings yet
- Differentialekvation II Inl 1 PDFDocument3 pagesDifferentialekvation II Inl 1 PDFTom GlansholmNo ratings yet
- Hupp 1Document11 pagesHupp 1erik perssonNo ratings yet
- NOLLRUMDocument14 pagesNOLLRUMMustafah RahimiNo ratings yet
- Fysik 1 Labb 6Document9 pagesFysik 1 Labb 6Nora SöderbergNo ratings yet
- MATMAT03c U 3 170911Document9 pagesMATMAT03c U 3 170911Luna0% (1)
- Analys Sem1 (1,2,3,4,5) PDFDocument10 pagesAnalys Sem1 (1,2,3,4,5) PDFHannes BoholmNo ratings yet
- 5 Laboration EnergiomvandlingDocument4 pages5 Laboration Energiomvandlingmahmoud sersawyNo ratings yet
- Kap 3 Rev 2019 MatrisDocument5 pagesKap 3 Rev 2019 Matris18x17No ratings yet
- Ma 4 Uppdrag 2Document10 pagesMa 4 Uppdrag 2Luna0% (1)
- X DX T DT: Formelblad P A Baksidan!Document2 pagesX DX T DT: Formelblad P A Baksidan!alexNo ratings yet
- SnölastDocument3 pagesSnölastSadaqat AliNo ratings yet
- Fysik 2Document9 pagesFysik 2شاب مسلم سني لحما دماNo ratings yet
- Elin Ottergren, LogaritmiDocument9 pagesElin Ottergren, LogaritmiCorrado CaselungheNo ratings yet
- Makalahmetode IndahriadefitaDocument11 pagesMakalahmetode IndahriadefitaZaynNo ratings yet
- Fysik 1 Labb 4Document12 pagesFysik 1 Labb 4Nora SöderbergNo ratings yet
- RäkneuppgifterDocument21 pagesRäkneuppgifteradfNo ratings yet
- Laboration 3 Harmonisk Svängning På Lokal PDFDocument7 pagesLaboration 3 Harmonisk Svängning På Lokal PDFmahmoud sersawy0% (1)
- Uppsala Universitet Matematiska InstitutionenDocument3 pagesUppsala Universitet Matematiska InstitutionenpungkukNo ratings yet
- Mekanik Grundläggande, FöreläsningDocument53 pagesMekanik Grundläggande, FöreläsningrappakaljaNo ratings yet
- Krafter Del 1 Och Tryck PDFDocument4 pagesKrafter Del 1 Och Tryck PDFfelli100% (1)
- Medicinsk mikrobiologi I: Patogener och mänskligt mikrobiomFrom EverandMedicinsk mikrobiologi I: Patogener och mänskligt mikrobiomNo ratings yet
- Medarbetarskap, ledarskap och allt däremellan; Lifehacks för oss mitt i (arbets)livetFrom EverandMedarbetarskap, ledarskap och allt däremellan; Lifehacks för oss mitt i (arbets)livetNo ratings yet
- Tvångssyndrom/OCD: - orsaker och behandling i ett beteendeterapeutiskt perspektivFrom EverandTvångssyndrom/OCD: - orsaker och behandling i ett beteendeterapeutiskt perspektivNo ratings yet
- Kognitiv BeteendeTerapi och lite till: 49 års erfarenheter som beteendeterapeutFrom EverandKognitiv BeteendeTerapi och lite till: 49 års erfarenheter som beteendeterapeutNo ratings yet
- Hur syntetiseras Amfetamin och hur skiljer procedurer för erhållandet av amfetaminsulfat?: En naturvetenskaplig studieFrom EverandHur syntetiseras Amfetamin och hur skiljer procedurer för erhållandet av amfetaminsulfat?: En naturvetenskaplig studieRating: 5 out of 5 stars5/5 (1)
- Högkänslig ... än sen då?: En guide för dig som vill förståFrom EverandHögkänslig ... än sen då?: En guide för dig som vill förståNo ratings yet
- Medvetande: Upptäck sinnets olika stadier: från det medvetna till det omedvetna, från biologiska rytmers inflytande till sömn och drömmarFrom EverandMedvetande: Upptäck sinnets olika stadier: från det medvetna till det omedvetna, från biologiska rytmers inflytande till sömn och drömmarNo ratings yet
- Konstiga sammanträffanden i ditt liv. Små nyfiken fakta. Aningar. Telepati. Händer det till dig?From EverandKonstiga sammanträffanden i ditt liv. Små nyfiken fakta. Aningar. Telepati. Händer det till dig?No ratings yet
- Organisk-kemisk nomenklatur: En introduktion till det kemiska språketFrom EverandOrganisk-kemisk nomenklatur: En introduktion till det kemiska språketNo ratings yet
- Grundläggande algebra: Axiom, förenklingar, ekvationslösning, komplexa talFrom EverandGrundläggande algebra: Axiom, förenklingar, ekvationslösning, komplexa talNo ratings yet
- Sluta älta och grubbla: lättare gjort med kognitiv beteendeterapiFrom EverandSluta älta och grubbla: lättare gjort med kognitiv beteendeterapiRating: 4 out of 5 stars4/5 (1)
- Kvantförtrassling och kollektivt omedvetet. Fysik och metafysik i universum. Nya tolkningarFrom EverandKvantförtrassling och kollektivt omedvetet. Fysik och metafysik i universum. Nya tolkningarNo ratings yet
- Hypnos, avslappning och suggestion ur KBT-perspektiv: Handbok för kliniker, speciellt inom tandvårdenFrom EverandHypnos, avslappning och suggestion ur KBT-perspektiv: Handbok för kliniker, speciellt inom tandvårdenNo ratings yet
- Kroppsspråk och icke-verbal kommunikation: Hur du bättre förstår dig själv och andra tack vare kroppsspråkets psykologi och neurovetenskapFrom EverandKroppsspråk och icke-verbal kommunikation: Hur du bättre förstår dig själv och andra tack vare kroppsspråkets psykologi och neurovetenskapNo ratings yet