You might also like
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- Chapter - 2 Spring and Bar ElementsDocument22 pagesChapter - 2 Spring and Bar ElementsWaleed TayyabNo ratings yet
- A4 - Intro To FEM4 - Beam - p1Document23 pagesA4 - Intro To FEM4 - Beam - p1Niño Cochise SarcenoNo ratings yet
- Microsoft Word - MA3004 - Tutorial 6 (FEM) Questions - AY2022-23Document3 pagesMicrosoft Word - MA3004 - Tutorial 6 (FEM) Questions - AY2022-23Luna OpalNo ratings yet
- 8.simple Harmonic Motion and ElasticityExercise PDFDocument81 pages8.simple Harmonic Motion and ElasticityExercise PDFSubbalakshmi Yeleswarapu 010311100% (1)
- Chapter 2. Homogeneous SemiconductorsDocument49 pagesChapter 2. Homogeneous Semiconductorsfourier76No ratings yet
- Lecture 2: One Dimensional Problems: APL705 Finite Element MethodDocument5 pagesLecture 2: One Dimensional Problems: APL705 Finite Element MethodZafar AlamNo ratings yet
- Solution Methods For Beam and Frames On Elastic Foundation Using The Finite Element MethodDocument13 pagesSolution Methods For Beam and Frames On Elastic Foundation Using The Finite Element MethodAnonymous 0tT3SeNo ratings yet
- De2008decompositions 2Document34 pagesDe2008decompositions 2ditceeNo ratings yet
- Misrimal Navajee Munoth Jain Engineering College Department of Mechanical Engineering Formulae For ME 6603 - Finite Element Analysis (6 Semester)Document6 pagesMisrimal Navajee Munoth Jain Engineering College Department of Mechanical Engineering Formulae For ME 6603 - Finite Element Analysis (6 Semester)Janarthanan BalakrishnasamyNo ratings yet
- Fem 7Document19 pagesFem 7ShaswathMurtuguddeNo ratings yet
- Quetion 3-OptimizationDocument8 pagesQuetion 3-Optimizationbadr amNo ratings yet
- Kinni4 SolutionDocument5 pagesKinni4 Solutionuday singhNo ratings yet
- 3-Lesson3-Density of State & Current ConcDocument16 pages3-Lesson3-Density of State & Current Conctoby3124No ratings yet
- Chapter 3 Spring and Bar Elements 1Document6 pagesChapter 3 Spring and Bar Elements 1Paolo Angelo GutierrezNo ratings yet
- JEE Main 2024 Physics Question Papers With Answer Key PDFDocument5 pagesJEE Main 2024 Physics Question Papers With Answer Key PDFharsitypratapNo ratings yet
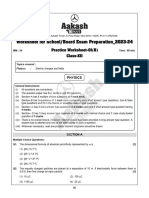
- Practice WS-01 (B) - Electric Charges and Fields - Physics - XIIthDocument4 pagesPractice WS-01 (B) - Electric Charges and Fields - Physics - XIIthsankarshanrao2No ratings yet
- Chapt.11 (Finite Element Analysis)Document39 pagesChapt.11 (Finite Element Analysis)Salam FaithNo ratings yet
- Total Potential Energy For Axial Bar Element: - W.K.T From SOM Axial Strain Is Given By, StrainDocument34 pagesTotal Potential Energy For Axial Bar Element: - W.K.T From SOM Axial Strain Is Given By, StrainRaviindra singhNo ratings yet
- Annals 2021 4 02Document4 pagesAnnals 2021 4 02banaganapallimunidhanushNo ratings yet
- Exercico 5.6 ListaDocument4 pagesExercico 5.6 ListaSara AvizNo ratings yet
- Finite Element Method: Plane and Axisymmetric Elastic ProblemsDocument55 pagesFinite Element Method: Plane and Axisymmetric Elastic ProblemsHalef Michel Bou KarimNo ratings yet
- Nonlinear Analysis of Shells Using The MITC FormulDocument51 pagesNonlinear Analysis of Shells Using The MITC Formulmuhamad doskyNo ratings yet
- Fem 2Document20 pagesFem 2tilahun yeshiyeNo ratings yet
- 10-Introducing The Finite Element Method in Electromagnetics To Undergraduates Using MATLAB PDFDocument13 pages10-Introducing The Finite Element Method in Electromagnetics To Undergraduates Using MATLAB PDFsknNo ratings yet
- Beam Stiffness MatrixDocument5 pagesBeam Stiffness Matrixadnan-651358No ratings yet
- Microsoft Word - Ese352v2 - chp2 - DiscreteDocument37 pagesMicrosoft Word - Ese352v2 - chp2 - DiscreteMOHD ENDRA SHAFIQNo ratings yet
- Pset 2Document3 pagesPset 2jjkNo ratings yet
- Topics Appendix - B Cartesian Tensors Appendix - B Cartesian TensorsDocument11 pagesTopics Appendix - B Cartesian Tensors Appendix - B Cartesian TensorsSri VatsanNo ratings yet
- 3395 8177 1 PBDocument14 pages3395 8177 1 PBkhadijaNo ratings yet
- Final Exam Engineering Mechanics II 2021 - KelvinDocument5 pagesFinal Exam Engineering Mechanics II 2021 - KelvinKelvin AndreasNo ratings yet
- Formulas For Binomial Sums Including Powers of Fibonacci and Lucas NumbersDocument12 pagesFormulas For Binomial Sums Including Powers of Fibonacci and Lucas NumbersMinh TuấnNo ratings yet
- Example 1.2: Several Springs Are Connected As Shown in Figure 1.2 Subjected To An Axial ForceDocument5 pagesExample 1.2: Several Springs Are Connected As Shown in Figure 1.2 Subjected To An Axial ForceVinaasha BalakrishnanNo ratings yet
- Finite Element Method: A First Course in TheDocument10 pagesFinite Element Method: A First Course in TheAbu bakr Al-azzawiNo ratings yet
- Wall-Adapting Local Eddy-Viscosity Models For Simulations in Complex GeometriesDocument7 pagesWall-Adapting Local Eddy-Viscosity Models For Simulations in Complex GeometriesMatheus MarquesNo ratings yet
- Exercice S Repetition 1Document26 pagesExercice S Repetition 1amine.haidaoui2000No ratings yet
- Module 10 With Solutions PDFDocument18 pagesModule 10 With Solutions PDFgavin_d265No ratings yet
- Lect01 - Discreter Element Example of FEM - Fall 2023Document8 pagesLect01 - Discreter Element Example of FEM - Fall 2023Naresh DamaNo ratings yet
- Chapter 3 - Lecture 4 - AnnotatedDocument29 pagesChapter 3 - Lecture 4 - AnnotatedAhmed TamerNo ratings yet
- Finite Element Analysis of TrussesDocument17 pagesFinite Element Analysis of TrussesMuhammad FarooqNo ratings yet
- CAED Lec4 BarElement Sept2014Document18 pagesCAED Lec4 BarElement Sept2014Kelly ChanNo ratings yet
- Lecture 2 Plasma PhysicsDocument9 pagesLecture 2 Plasma PhysicsRobiul Islam RobiNo ratings yet
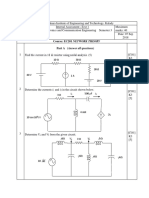
- Course: Ec201 Network Theory Part A (Answer All Questions)Document2 pagesCourse: Ec201 Network Theory Part A (Answer All Questions)rcherrNo ratings yet
- Soft Elasticity and Microstructure in Smectic C ElastomersDocument24 pagesSoft Elasticity and Microstructure in Smectic C Elastomerschenny_qyudNo ratings yet
- Structural Dynamics: 2CE611 by DR S S Mishra, NIT Patna: Rayleigh QuotientDocument7 pagesStructural Dynamics: 2CE611 by DR S S Mishra, NIT Patna: Rayleigh QuotientRoshni TNo ratings yet
- n1 MATRIX ANALYSISDocument28 pagesn1 MATRIX ANALYSISarjungireesh789No ratings yet
- Tutorial2 SolutionDocument9 pagesTutorial2 SolutionSam StideNo ratings yet
- Complex Moduli of Viscoelastic Composites-II. Fiber Reinforced MaterialsDocument11 pagesComplex Moduli of Viscoelastic Composites-II. Fiber Reinforced MaterialsKomal ChawlaNo ratings yet
- Ece2610 Chap3Document46 pagesEce2610 Chap3jagriti kumariNo ratings yet
- Tst2601 Major Test 1Document5 pagesTst2601 Major Test 1malwandlaNo ratings yet
- 2009 WS NAS Test04Document4 pages2009 WS NAS Test04pppppNo ratings yet
- National Institute of Technology, Rourkela-8 B.Tech. Mid Semester (Autumn) Examination, 2017-18 SUBJECT: Advanced Control System EngineeringDocument2 pagesNational Institute of Technology, Rourkela-8 B.Tech. Mid Semester (Autumn) Examination, 2017-18 SUBJECT: Advanced Control System EngineeringMadhusmita BarikNo ratings yet
- Past Year3Document9 pagesPast Year3Muhd Aqeem FarisNo ratings yet
- Mihal Ache 1988Document6 pagesMihal Ache 1988Ismael ArceNo ratings yet
- Electricity and MagnetismDocument53 pagesElectricity and MagnetismQuỳnh GiaoNo ratings yet
- Análisis de La Convergencia de Sucesiones para WaveletsDocument31 pagesAnálisis de La Convergencia de Sucesiones para WaveletsjuanNo ratings yet
- 31st Jan Shift - 2 - AakashDocument17 pages31st Jan Shift - 2 - AakashDr boroNo ratings yet
- Subject 4.5. Splitter OCW 2017Document1 pageSubject 4.5. Splitter OCW 2017Estefanía Duarte SilvaNo ratings yet
- Optimized Map Turbo Decoder: Curt Schurgers Francky Catthoor Marc EngelsDocument10 pagesOptimized Map Turbo Decoder: Curt Schurgers Francky Catthoor Marc Engelsvensri9994563No ratings yet
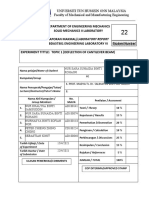
- Department of Engineering Mechanics Solid Mechanics Ii Laboratory Laporan Makmal/Laboratory Report Bda37301 Engineering Laboratory ViDocument12 pagesDepartment of Engineering Mechanics Solid Mechanics Ii Laboratory Laporan Makmal/Laboratory Report Bda37301 Engineering Laboratory VinoraNo ratings yet
- Group 6e s6 Deflection of CantileverbeamDocument17 pagesGroup 6e s6 Deflection of CantileverbeamnoraNo ratings yet
- Universiti Tun Hussein Onn Malaysia: ConfidentialDocument4 pagesUniversiti Tun Hussein Onn Malaysia: ConfidentialnoraNo ratings yet
- Feedback Control Systems (FCS)Document56 pagesFeedback Control Systems (FCS)noraNo ratings yet
- CH2-MACHINING Mac 2021Document139 pagesCH2-MACHINING Mac 2021noraNo ratings yet
- CH1-BDA 30502 Yusri 2021Document40 pagesCH1-BDA 30502 Yusri 2021noraNo ratings yet
- ArahanprojekDocument1 pageArahanprojeknoraNo ratings yet
- KJM597 Control Systems Introduction Into Control Systems: Fakulti Kejuruteraan Mekanikal Universiti Teknologi MARADocument23 pagesKJM597 Control Systems Introduction Into Control Systems: Fakulti Kejuruteraan Mekanikal Universiti Teknologi MARAnoraNo ratings yet
- Y y U U: Tutorial Boundary LayerDocument3 pagesY y U U: Tutorial Boundary LayernoraNo ratings yet
- Tutorial Chapter 2Document2 pagesTutorial Chapter 2noraNo ratings yet
- Graph f2 PDFDocument3 pagesGraph f2 PDFnoraNo ratings yet
- Lecture 1: INTRODUCTION: Fakulti Kejuruteraan Mekanikal Universiti Teknologi MARADocument29 pagesLecture 1: INTRODUCTION: Fakulti Kejuruteraan Mekanikal Universiti Teknologi MARAnoraNo ratings yet
- Hydraulic Gradient, I Vs Velocity, V (M/S)Document3 pagesHydraulic Gradient, I Vs Velocity, V (M/S)noraNo ratings yet
- Recent Studies On Piled-Raft Foundation: State of Art: V.J.Sharma, S.A.Vasanvala, C.H.SolankiDocument9 pagesRecent Studies On Piled-Raft Foundation: State of Art: V.J.Sharma, S.A.Vasanvala, C.H.SolankiMặc Thế NhânNo ratings yet
- 1998 - Study of Stress Development in Axi-Symmetric Products Processed by Radial Forging Using A 3-D Non-Linear Finite-Element MethodDocument9 pages1998 - Study of Stress Development in Axi-Symmetric Products Processed by Radial Forging Using A 3-D Non-Linear Finite-Element MethodNguyen Hoang DungNo ratings yet
- Unlisted Material GuideDocument4 pagesUnlisted Material Guideomar mahmoudNo ratings yet
- Evaluation For VesselDocument10 pagesEvaluation For VesselEngineering ESIINo ratings yet
- S2-Finite Element Analysis For Geomechanics (517) .Text - MarkedDocument2 pagesS2-Finite Element Analysis For Geomechanics (517) .Text - MarkedHari RamNo ratings yet
- 2007-2012 Complete List 4th Year Projects Sept 2017Document149 pages2007-2012 Complete List 4th Year Projects Sept 2017Bhimsen ShresthaNo ratings yet
- Arb 4x4 Accessories 1 Arb Product Catalogue 2015 PDFDocument188 pagesArb 4x4 Accessories 1 Arb Product Catalogue 2015 PDFMeigallomanNo ratings yet
- Assessing The Accuracy of Load-Carrying Capacity Predictions of Ethiopian Standard, Compressive Force Path Method and Finite Element AnalysisDocument20 pagesAssessing The Accuracy of Load-Carrying Capacity Predictions of Ethiopian Standard, Compressive Force Path Method and Finite Element AnalysisTesfamichael AbathunNo ratings yet
- Applied Mechanics of Solids (A.F. Bower) Chapter 3 - Constitutive Laws - 3Document19 pagesApplied Mechanics of Solids (A.F. Bower) Chapter 3 - Constitutive Laws - 3Namelezz ShadowwNo ratings yet
- Engineering Journal: Fourth Quarter 2019 - Volume 56, No. 4Document56 pagesEngineering Journal: Fourth Quarter 2019 - Volume 56, No. 4albertoxinaNo ratings yet
- Han, 2010, Effective Beam Width For Flat Plate Frames Having Edge BeamsDocument9 pagesHan, 2010, Effective Beam Width For Flat Plate Frames Having Edge Beamsprisciliano1No ratings yet
- Bok:978 1 4020 8733 2 PDFDocument495 pagesBok:978 1 4020 8733 2 PDFJLLIMPE3116No ratings yet
- INTERPRETATION 603 To Answers To Questions On en 81-20-50 AprDocument12 pagesINTERPRETATION 603 To Answers To Questions On en 81-20-50 ApraleronaNo ratings yet
- 06fsj Ls Dyna SfeDocument17 pages06fsj Ls Dyna SfeAref AbadelNo ratings yet
- DT PaperDocument5 pagesDT PaperR Krishnakumar MA. ME.No ratings yet
- FEM With Analytical Approach Based Wind and Seismic Design Recommendations For Vertical Tall Process ColumnDocument9 pagesFEM With Analytical Approach Based Wind and Seismic Design Recommendations For Vertical Tall Process ColumnSASWAT MISHRANo ratings yet
- Aerospace Material: Fatigue of Aerospace MaterialsDocument14 pagesAerospace Material: Fatigue of Aerospace MaterialsKalyude DiógenesNo ratings yet
- 1 Blomax e PDFDocument15 pages1 Blomax e PDFDevan FairzNo ratings yet
- journalsresaim,+IJRESM V3 I8 104Document4 pagesjournalsresaim,+IJRESM V3 I8 104077bme030No ratings yet
- Solution of Problems in The Theory of Shells by FDMDocument18 pagesSolution of Problems in The Theory of Shells by FDMVitor Folador GonçalvesNo ratings yet
- Samcef RotorDocument4 pagesSamcef RotorChihiya Fitria NurhayatiNo ratings yet
- My Fem ProjectDocument29 pagesMy Fem ProjectOraib AljaafrehNo ratings yet
- MSC NastranDocument6 pagesMSC NastranJan ScarNo ratings yet
- A4 SPEC Pumping Systems 201507 PDFDocument5 pagesA4 SPEC Pumping Systems 201507 PDFJose BijoyNo ratings yet
- Experimental and Numerical Studies On Steel Penstock Vibrations Caused by Pressure PulsationsDocument12 pagesExperimental and Numerical Studies On Steel Penstock Vibrations Caused by Pressure PulsationsyosaNo ratings yet
- Advanced Finite Element Methods For Engineers: Exercise 3Document31 pagesAdvanced Finite Element Methods For Engineers: Exercise 3Sangram BhosaleNo ratings yet
- Assignment 4 Beam Element AE5030 Advanced Finite Element MethodDocument14 pagesAssignment 4 Beam Element AE5030 Advanced Finite Element MethodBudiAjiNo ratings yet
- CATIA Generative Structural AnalysisDocument1,233 pagesCATIA Generative Structural Analysistomcat14dNo ratings yet
- Finite Element Modeling of Concrete Fracture in Tension With The Brazilian Splitting Test On The Case of Plane-Stress and Plane-StrainDocument8 pagesFinite Element Modeling of Concrete Fracture in Tension With The Brazilian Splitting Test On The Case of Plane-Stress and Plane-StrainMohd DanishNo ratings yet
- Eddy Current Losses TurowskiDocument6 pagesEddy Current Losses TurowskiHafsa IkramNo ratings yet