You might also like
- Fourier Series, Fourier Integral, Fourier TransformDocument29 pagesFourier Series, Fourier Integral, Fourier Transformvasu_koneti5124No ratings yet
- Chapter4 PDFDocument65 pagesChapter4 PDFHương HươngNo ratings yet
- National Building Code of The Philippines - Its History, Current State, and FutureDocument12 pagesNational Building Code of The Philippines - Its History, Current State, and FutureJordan Empensando OliverosNo ratings yet
- Chapter 5a Z-TransformDocument55 pagesChapter 5a Z-Transformfarina ilyanaNo ratings yet
- (Akira Takayama) Analytical Methods in EconomicsDocument693 pages(Akira Takayama) Analytical Methods in EconomicsCarla Valverde España100% (4)
- 08 AngularDocument26 pages08 AngulardwyphyNo ratings yet
- Quantitative Aptitude - Vol 1Document189 pagesQuantitative Aptitude - Vol 1Ruby Sheela100% (2)
- 3rd Periodic Test in MathDocument6 pages3rd Periodic Test in MathRowena BalabagnoNo ratings yet
- The Z-Transform and Its Roc Properties: - ObjectivesDocument11 pagesThe Z-Transform and Its Roc Properties: - ObjectivesJane LitouwNo ratings yet
- Lecture 28Document11 pagesLecture 28Diptiben GanatraNo ratings yet
- Lecture 6 - Plane GridsDocument11 pagesLecture 6 - Plane GridsJordan Empensando OliverosNo ratings yet
- Ece212 Esa Lecture8 ZTDocument32 pagesEce212 Esa Lecture8 ZTahmed osama elsayed ahmedNo ratings yet
- MES 307 GM Getaran Paksa HarmonisDocument38 pagesMES 307 GM Getaran Paksa HarmonisNanda Diyah PitalokaNo ratings yet
- Chapter3 STDocument99 pagesChapter3 STHoang TranNo ratings yet
- Laplace Transform and Its Application: Prepare By: Mayur PrajapatiDocument24 pagesLaplace Transform and Its Application: Prepare By: Mayur Prajapatifares noureddineNo ratings yet
- 9 IirDocument28 pages9 IirMekonen AberaNo ratings yet
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersNikita ShakyaNo ratings yet
- Energy & Variational Methods: MEEN 618Document2 pagesEnergy & Variational Methods: MEEN 618KrishnaKaushikNo ratings yet
- A New Slope Stability Method R0Document18 pagesA New Slope Stability Method R0Eric ChanNo ratings yet
- Project Report Linear SystemsDocument39 pagesProject Report Linear SystemsMd.tanvir Ibny GiasNo ratings yet
- About Differentia Transformation-4.17Document12 pagesAbout Differentia Transformation-4.17mubarakNo ratings yet
- Laplace Transform and Its Application: Prepare By: Mayur PrajapatiDocument24 pagesLaplace Transform and Its Application: Prepare By: Mayur PrajapatiNirmal PanchalNo ratings yet
- Geostatistics in Hydrology Krig PDFDocument25 pagesGeostatistics in Hydrology Krig PDFHamid KorNo ratings yet
- Fast Fourier Transform (FFT) : ) ( Elsewhere, 0 1 0), ( ) (E N X K X N N N X N XDocument27 pagesFast Fourier Transform (FFT) : ) ( Elsewhere, 0 1 0), ( ) (E N X K X N N N X N XVivien VilladelreyNo ratings yet
- Tight Binding Toy Model Band (1D) : PY-501 Assignment 3Document2 pagesTight Binding Toy Model Band (1D) : PY-501 Assignment 3Rupesh KannanNo ratings yet
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersHarreniNo ratings yet
- Yn Ayn Ayn N BXN BXN N: Recursive FiltersDocument28 pagesYn Ayn Ayn N BXN BXN N: Recursive FiltersnikshithNo ratings yet
- Fourier Analysis of Discrete Time SignalsDocument18 pagesFourier Analysis of Discrete Time SignalsMVRajeshMaliyeckalNo ratings yet
- Dynamic Response of Mdof Structures-Part 2: by DR - Kabtamu G, Ju, Jit, Civil Eng Dept Feb2021Document59 pagesDynamic Response of Mdof Structures-Part 2: by DR - Kabtamu G, Ju, Jit, Civil Eng Dept Feb2021Mohammed B TuseNo ratings yet
- The Z-Transform: ECON 397 Macroeconometrics CunninghamDocument22 pagesThe Z-Transform: ECON 397 Macroeconometrics CunninghamChris AlunanNo ratings yet
- On A New Multivariate Sampling Paradigm and A Polyspline Shannon FunctionDocument23 pagesOn A New Multivariate Sampling Paradigm and A Polyspline Shannon FunctionKounchevNo ratings yet
- Fourier Analysis of Discrete Time SignalsDocument11 pagesFourier Analysis of Discrete Time SignalsprathikNo ratings yet
- Department of Mathematics and Statistics University of Jaffna Classical Mechanics (AMM302G3)Document10 pagesDepartment of Mathematics and Statistics University of Jaffna Classical Mechanics (AMM302G3)hujhihNo ratings yet
- 10 1 1 638 8968Document8 pages10 1 1 638 8968Saad mubeenNo ratings yet
- EE331 ChapterI PartIIDocument5 pagesEE331 ChapterI PartIIMohamed Ouail CHARAOUINo ratings yet
- WINSEM2022-23 BECE202L TH VL2022230502136 2023-04-03 Reference-Material-IDocument11 pagesWINSEM2022-23 BECE202L TH VL2022230502136 2023-04-03 Reference-Material-IAnooshree vijayakumarNo ratings yet
- Chapter56 Laplace&TFDocument106 pagesChapter56 Laplace&TFfebri setyawanNo ratings yet
- Wk8 Lectrure8 21nov2017 NewformatDocument14 pagesWk8 Lectrure8 21nov2017 Newformatهاني احمدNo ratings yet
- Annals of MathematicsDocument12 pagesAnnals of MathematicsPeter SabtchevskiNo ratings yet
- Transmission LinesDocument34 pagesTransmission LinesBasanta Kumar GautamNo ratings yet
- 5.111 Principles of Chemical Science: Mit OpencoursewareDocument5 pages5.111 Principles of Chemical Science: Mit OpencoursewaresubhasisknkNo ratings yet
- Lecture 6Document48 pagesLecture 6api-3803118No ratings yet
- Smoothing Techniques in Image ProcessingDocument59 pagesSmoothing Techniques in Image ProcessingNinni SinghNo ratings yet
- Advanced Fourier Eng+ItaDocument46 pagesAdvanced Fourier Eng+ItaLeonardo RubinoNo ratings yet
- WINSEM2015 16 - CP2656 - 25 Jan 2016 - RM01 - Moment Generating FunctionDocument2 pagesWINSEM2015 16 - CP2656 - 25 Jan 2016 - RM01 - Moment Generating FunctionAshutosh MauryaNo ratings yet
- Transformada ZDocument17 pagesTransformada Znikika1No ratings yet
- II. Bar Element: Consider A Uniform Prismatic Bar: U U A, EDocument9 pagesII. Bar Element: Consider A Uniform Prismatic Bar: U U A, ENadher Al-BaghdadiNo ratings yet
- The Vibration Influence Above The Strains State of Linear Elastic Bar Type Cinematic Elements of The MechanismsDocument7 pagesThe Vibration Influence Above The Strains State of Linear Elastic Bar Type Cinematic Elements of The Mechanismsrmalciu311No ratings yet
- Linear TransformationDocument10 pagesLinear TransformationDarshan LohadeNo ratings yet
- Extended and Modified Halley ' S Iterative Method For Solving Non Linear EquationsDocument10 pagesExtended and Modified Halley ' S Iterative Method For Solving Non Linear Equationsjhon jairo portillaNo ratings yet
- Fir and Iir Transfer Functions: Yn HKXNK Yz HZXZDocument39 pagesFir and Iir Transfer Functions: Yn HKXNK Yz HZXZKAKUL SHRIVASTAVANo ratings yet
- Seismic Response of Rail Counterweight SystemsDocument21 pagesSeismic Response of Rail Counterweight Systemsloveleen asaliaNo ratings yet
- CSE - 610 Lecture # 5Document38 pagesCSE - 610 Lecture # 5zaidNo ratings yet
- Automatics and Automatic ControlDocument33 pagesAutomatics and Automatic ControlaliNo ratings yet
- Smoothing Techniques in Image ProcessingDocument59 pagesSmoothing Techniques in Image ProcessingAzwar TamimNo ratings yet
- Discrete Time Control SystemDocument17 pagesDiscrete Time Control SystemAshokNo ratings yet
- Radius of A StarDocument6 pagesRadius of A Starishaan yadavNo ratings yet
- Laplace Transforms: LinearDocument11 pagesLaplace Transforms: Linear李承家No ratings yet
- Lecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace TransformDocument30 pagesLecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace Transformanuj jainNo ratings yet
- ReminderDocument37 pagesReminderErika Mae Adoja EspejoNo ratings yet
- Formula SheetDocument7 pagesFormula SheetFelipe RincónNo ratings yet
- Lecture 04Document35 pagesLecture 04Daniele PasseroneNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- 1968 August 02 Casiguran EarthquakeDocument4 pages1968 August 02 Casiguran EarthquakeJordan Empensando OliverosNo ratings yet
- DRAFT TimberRetro Manual Complete 2015 08 04Document139 pagesDRAFT TimberRetro Manual Complete 2015 08 04Jordan Empensando OliverosNo ratings yet
- Philippines: 10 February 2017 Magnitude 6.7 Surigao Del Norte EarthquakeDocument4 pagesPhilippines: 10 February 2017 Magnitude 6.7 Surigao Del Norte EarthquakeJordan Empensando OliverosNo ratings yet
- Nehrp Guidelines For The Seismic Rehabilitation of Buildings (Fema 273)Document3 pagesNehrp Guidelines For The Seismic Rehabilitation of Buildings (Fema 273)Jordan Empensando OliverosNo ratings yet
- Surigao, Philippines Earthquake: January 2017Document6 pagesSurigao, Philippines Earthquake: January 2017Jordan Empensando OliverosNo ratings yet
- DRAFT TimberRetro Manual Complete 2015 08 04Document139 pagesDRAFT TimberRetro Manual Complete 2015 08 04Jordan Empensando OliverosNo ratings yet
- 1968 August 02 Ms7.3 Casiguran EarthquakeDocument4 pages1968 August 02 Ms7.3 Casiguran EarthquakeJordan Empensando OliverosNo ratings yet
- Primer On The 10 February 2017 Magnitude 6.7 Earthquake at Surigao Del NorteDocument3 pagesPrimer On The 10 February 2017 Magnitude 6.7 Earthquake at Surigao Del NorteJordan Empensando OliverosNo ratings yet
- YSC2021 Conference Proceedings Draft 06Document156 pagesYSC2021 Conference Proceedings Draft 06Jordan Empensando OliverosNo ratings yet
- Atc 40 TocDocument5 pagesAtc 40 TocBoby culiusNo ratings yet
- Getting Wasted at Womadelaide: The Effect of Signage On Waste DisposalDocument17 pagesGetting Wasted at Womadelaide: The Effect of Signage On Waste DisposalJordan Empensando OliverosNo ratings yet
- National Building Code of The Philippines - Its History, Current State, and FutureDocument12 pagesNational Building Code of The Philippines - Its History, Current State, and FutureJordan Empensando OliverosNo ratings yet
- Earthquakes - British Geological SurveyDocument4 pagesEarthquakes - British Geological SurveyJordan Empensando OliverosNo ratings yet
- Analysis of 2-D Trusses Chapter 3 ExercisesDocument5 pagesAnalysis of 2-D Trusses Chapter 3 ExercisesJordan Empensando OliverosNo ratings yet
- Nonlinear Time-History Analysis of Modular Structures Isolated by Sliding Plates Under Seismic LoadsDocument8 pagesNonlinear Time-History Analysis of Modular Structures Isolated by Sliding Plates Under Seismic LoadsJordan Empensando OliverosNo ratings yet
- PipesDocument4 pagesPipesCamille Joy CucioNo ratings yet
- Matrix Structural Analysis: Degrees of Freedom (DOF)Document10 pagesMatrix Structural Analysis: Degrees of Freedom (DOF)Jordan Empensando OliverosNo ratings yet
- Lecture 3: 2-D Truss, Computer Based SolutionDocument13 pagesLecture 3: 2-D Truss, Computer Based SolutionJordan Empensando OliverosNo ratings yet
- Lecture 5Document26 pagesLecture 5Jordan Empensando OliverosNo ratings yet
- Chap 04Document27 pagesChap 04Brown RicNo ratings yet
- Lecture 1 - Special Matrix OperationDocument20 pagesLecture 1 - Special Matrix OperationJordan Empensando OliverosNo ratings yet
- GPSS Case Studies - PhilippinesDocument3 pagesGPSS Case Studies - PhilippinesJordan Empensando OliverosNo ratings yet
- Economies: The Evolution of The Key Sectors in The Philippine Economy Using An AHP-Based Sector Prioritization IndexDocument20 pagesEconomies: The Evolution of The Key Sectors in The Philippine Economy Using An AHP-Based Sector Prioritization IndexJordan Empensando OliverosNo ratings yet
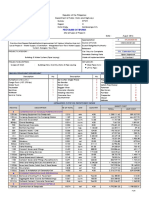
- Program of Works: Calendar DaysDocument6 pagesProgram of Works: Calendar DaysSymon Dela CruzNo ratings yet
- Vertical Curves ReviewerDocument24 pagesVertical Curves ReviewerRalph Reinier D. Raquepo100% (1)
- Procurement Management Plan Template With InstructionsDocument12 pagesProcurement Management Plan Template With InstructionsJordan Empensando OliverosNo ratings yet
- Schedule of Second Floor Beams and Girders Schedule of SlabsDocument1 pageSchedule of Second Floor Beams and Girders Schedule of SlabsJordan Empensando OliverosNo ratings yet
- Curve Tracing: Monotonic Function, Concavity and Point of InflectionDocument9 pagesCurve Tracing: Monotonic Function, Concavity and Point of InflectionpreetiNo ratings yet
- Study Material For Class IXDocument21 pagesStudy Material For Class IXCHARAN 8BNo ratings yet
- WEEK 1 (Math)Document37 pagesWEEK 1 (Math)Rosemarie AstilleroNo ratings yet
- Geometry in The Real WorldDocument14 pagesGeometry in The Real Worldapi-295396994No ratings yet
- Geometric NumbersDocument12 pagesGeometric NumbersGaro OhanogluNo ratings yet
- Metric On Measure SpaceDocument2 pagesMetric On Measure SpaceSR CreationNo ratings yet
- Fractional Derivatives PDFDocument8 pagesFractional Derivatives PDFhumejiasNo ratings yet
- Ch. (1) Ordinary Differential Equation of First Order PP 4-9Document6 pagesCh. (1) Ordinary Differential Equation of First Order PP 4-9二AliNo ratings yet
- 2015 Gr12 Maths WKBKDocument27 pages2015 Gr12 Maths WKBKKelvin TanyaNo ratings yet
- геометрия синфи 11Document16 pagesгеометрия синфи 11Biloljon MuminovNo ratings yet
- Homework Diff 2 PDFDocument11 pagesHomework Diff 2 PDFKking ChungNo ratings yet
- H2 X RDocument38 pagesH2 X RRuben Ainsten GaussNo ratings yet
- Algebra LeoDocument6 pagesAlgebra LeoCriselda Santos FriasNo ratings yet
- Ec6303 - Signals and Systems Question Bank Unit - I: 2 MarksDocument10 pagesEc6303 - Signals and Systems Question Bank Unit - I: 2 MarksPrasanna Kumar BNo ratings yet
- 100 Days Time-Table BITSAT 2021Document6 pages100 Days Time-Table BITSAT 2021Susritha SriramulaNo ratings yet
- Julia SetsDocument12 pagesJulia SetsomarfariNo ratings yet
- Calculus 2 - Tutorial 2Document4 pagesCalculus 2 - Tutorial 2Albert CofieNo ratings yet
- Trigonometry 2nd Edition Blitzer Test Bank 1Document43 pagesTrigonometry 2nd Edition Blitzer Test Bank 1Doris Golden100% (39)
- Presentation On MathematicsDocument16 pagesPresentation On MathematicsEngr. Md Hasib Modina EngineeringNo ratings yet
- DunnoDocument1 pageDunnoCasey J. MurphyNo ratings yet
- A. Permutation of N Different Objects, Taken All or Some of ThemDocument8 pagesA. Permutation of N Different Objects, Taken All or Some of ThemChristina Corazon GoNo ratings yet
- Permutation MatrixDocument2 pagesPermutation MatrixrodwellheadNo ratings yet
- 2050A Solution 3Document2 pages2050A Solution 3Samuel Alfonzo Gil BarcoNo ratings yet
- Maths 13.2 PDFDocument7 pagesMaths 13.2 PDFBrian LiNo ratings yet
- Squares and Square RootsDocument3 pagesSquares and Square RootsCharline FergusonNo ratings yet
- KU Math NEP 2020-FinalDocument38 pagesKU Math NEP 2020-Finalsoham.ghosh072No ratings yet
- L-2 - Relations and LatticesDocument14 pagesL-2 - Relations and LatticesCustom 11No ratings yet