You might also like
- ELECTRICAL INSTALLATIONS Task1Document7 pagesELECTRICAL INSTALLATIONS Task1Akmal HazimNo ratings yet
- Industry Process Automation Using Programmable SwitchingDocument5 pagesIndustry Process Automation Using Programmable SwitchingMd. Arif Ahmed100% (1)
- Direct Energy Conversion Lecture I PDFDocument11 pagesDirect Energy Conversion Lecture I PDFAftab Ali Afridi33% (3)
- Energy Control Center Functions For Power SystemDocument9 pagesEnergy Control Center Functions For Power SystemtejaNo ratings yet
- AGC PPT For M. TechDocument33 pagesAGC PPT For M. TechRonak patelNo ratings yet
- Torque-Speed Characteristics of DC MotorsDocument58 pagesTorque-Speed Characteristics of DC Motorsm1u2raliNo ratings yet
- Implementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerDocument8 pagesImplementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerMawunyo100% (1)
- NPTEL Power System Dynamics & ControlDocument2 pagesNPTEL Power System Dynamics & ControlhsesmaNo ratings yet
- Chapter 4 - Dynamic AnalysisDocument16 pagesChapter 4 - Dynamic AnalysisDimple Sharma100% (1)
- Sliding Mode Control of DC MotorDocument5 pagesSliding Mode Control of DC MotorPham Quoc ThienNo ratings yet
- Computer Applications in Power SystemsDocument34 pagesComputer Applications in Power SystemsAlebel AyalnehNo ratings yet
- Electric BrakingDocument27 pagesElectric Brakingmastanamma.YNo ratings yet
- Introduction To Control SystemsDocument90 pagesIntroduction To Control SystemsNuwan HemanthaNo ratings yet
- ECE461 Motor Lab Experiment5Document13 pagesECE461 Motor Lab Experiment5sameerpatel15770No ratings yet
- Ee8004 Modern Power Converters SyllabusDocument2 pagesEe8004 Modern Power Converters SyllabussignjpcoeNo ratings yet
- Scheme - I Sample Question PaperDocument4 pagesScheme - I Sample Question PaperYogesh ChaudhariNo ratings yet
- Valliammai Engineering College Question Bank on Electrical Drives and ControlDocument13 pagesValliammai Engineering College Question Bank on Electrical Drives and Controlsathish0% (1)
- Utilization of Electric PowerDocument1 pageUtilization of Electric PowerAbhimita GaineNo ratings yet
- Introduction To Control SystemsDocument28 pagesIntroduction To Control SystemsAK MizanNo ratings yet
- Control Systems and Instrumentation Lab GuideDocument3 pagesControl Systems and Instrumentation Lab GuideskrtamilNo ratings yet
- Module Information Module Title Electric Drives and Control Module Code MMD2511Document4 pagesModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaNo ratings yet
- L3: Microprocessor and MicrocontrollerDocument78 pagesL3: Microprocessor and MicrocontrollerMahesh100% (1)
- Chapter Four: DC-DC Conversion: DC ChoppersDocument55 pagesChapter Four: DC-DC Conversion: DC Choppersfor lifeNo ratings yet
- Ee1401 Power System Operation and Control Energy Control Center SafetyDocument3 pagesEe1401 Power System Operation and Control Energy Control Center Safetysrmce100% (1)
- Brake Load Test of Squirel Cage Induction Motor 3 PhaseDocument7 pagesBrake Load Test of Squirel Cage Induction Motor 3 Phasejassisc100% (1)
- Closed Loop Speed Control of DC Motor DrivesDocument4 pagesClosed Loop Speed Control of DC Motor DrivesypobuleshNo ratings yet
- EE2401 PSOC Notes - PDF-WWW - Chennaiuniversity.net - Unlocked PDFDocument20 pagesEE2401 PSOC Notes - PDF-WWW - Chennaiuniversity.net - Unlocked PDFClement RajNo ratings yet
- Class 27 - Modeling of Servo MotorsDocument25 pagesClass 27 - Modeling of Servo Motorsapi-26676616100% (1)
- Short Term Hydro Thermal SchedulingDocument30 pagesShort Term Hydro Thermal Schedulingrajendra_senapati67% (3)
- DTC PPTDocument17 pagesDTC PPTmanoranjanottaNo ratings yet
- National Institute of Technology, Rourkela: Department of Electrical EngineeringDocument11 pagesNational Institute of Technology, Rourkela: Department of Electrical Engineeringvineeth kumarNo ratings yet
- PLC Selection CriteriaDocument2 pagesPLC Selection Criteriamanuel rangelNo ratings yet
- DC Motor Speed ControlDocument24 pagesDC Motor Speed ControlSumu Talal50% (2)
- Analog and Digital ElectronicsDocument1 pageAnalog and Digital Electronicsveeramaniks408No ratings yet
- Discrete State Process ControlDocument37 pagesDiscrete State Process ControlVon JinNo ratings yet
- Solid State Drives - Lecture Notes, Study Material and Important Questions, AnswersDocument4 pagesSolid State Drives - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNo ratings yet
- Ee 1403 Solid State DrivesDocument14 pagesEe 1403 Solid State DrivesPanchi AgrawalNo ratings yet
- EE6009 PERES Unit IIIDocument301 pagesEE6009 PERES Unit IIIrivehappy1996No ratings yet
- Induction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFDocument7 pagesInduction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFbalajiNo ratings yet
- HVDC Transmission SystemsDocument2 pagesHVDC Transmission Systemskmd_venkatsubbu0% (1)
- BJT Frequency Responce PDFDocument57 pagesBJT Frequency Responce PDFAlpha RomeoNo ratings yet
- III Eee 05 Ee8501 Psa Unit 1Document37 pagesIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANNo ratings yet
- Chap 3 Signal Conditioning CircuitDocument26 pagesChap 3 Signal Conditioning CircuitMuhammed I'zwanNo ratings yet
- Vidyarthiplus Question Bank on Special Electrical MachinesDocument13 pagesVidyarthiplus Question Bank on Special Electrical MachinesjagadeeshNo ratings yet
- Experiment 3 Economic Load DispatchDocument12 pagesExperiment 3 Economic Load DispatchMahesh KambleNo ratings yet
- LF Control For Two Area Power System: Submitted By: Project GuideDocument13 pagesLF Control For Two Area Power System: Submitted By: Project GuideApurva GururaniNo ratings yet
- 3 Phase-Controlled DC Motor DrivesDocument45 pages3 Phase-Controlled DC Motor DrivesgilmartNo ratings yet
- JNTUK-UCEV ITWORKSHOP LAB MANUALDocument78 pagesJNTUK-UCEV ITWORKSHOP LAB MANUALRohit ReddyNo ratings yet
- 360 Topic 6 DC MachineDocument33 pages360 Topic 6 DC MachineAchsan ArfandiNo ratings yet
- Microprocessors, Micro Controller Assembly LanguageDocument60 pagesMicroprocessors, Micro Controller Assembly LanguageRikesh BhattacharyyaNo ratings yet
- SCADA Systems Improve Electrical Distribution ReliabilityDocument7 pagesSCADA Systems Improve Electrical Distribution Reliabilityvikram patilNo ratings yet
- Scada Fully 222Document13 pagesScada Fully 222pedalcastroNo ratings yet
- Review On SCADA System in PakistanDocument19 pagesReview On SCADA System in PakistanSalman Zafar100% (1)
- SeminarDocument23 pagesSeminaraartitomar47_8332176No ratings yet
- Unit - V: Computer Control of Power SystemsDocument18 pagesUnit - V: Computer Control of Power Systemsjagan gnitNo ratings yet
- Overview of SCADA Rep.2Document20 pagesOverview of SCADA Rep.2BochiNo ratings yet
- Integrating SCADA and Sap Operations For Electricity Process AutomationDocument3 pagesIntegrating SCADA and Sap Operations For Electricity Process AutomationHakim BenmajidNo ratings yet
- SCADADocument16 pagesSCADAbalak88No ratings yet
- Eee Iii To Viii PDFDocument77 pagesEee Iii To Viii PDFGow ThamNo ratings yet
- 206 - EE8391, EE6302 Electromagnetic Theory - 2marksDocument22 pages206 - EE8391, EE6302 Electromagnetic Theory - 2marksBALAKRISHNANNo ratings yet
- 206 - EE8391, EE6302 Electromagnetic Theory EMT - 2 Marks With AnswersDocument13 pages206 - EE8391, EE6302 Electromagnetic Theory EMT - 2 Marks With AnswersBALAKRISHNANNo ratings yet
- Me6402 2M Rejinpaul ViDocument30 pagesMe6402 2M Rejinpaul ViBALAKRISHNANNo ratings yet
- Energy and coenergy of a doubly excited magnetic field systemDocument2 pagesEnergy and coenergy of a doubly excited magnetic field systemBALAKRISHNANNo ratings yet
- EE305 - Electronics Devices and CircuitsDocument4 pagesEE305 - Electronics Devices and CircuitsBALAKRISHNANNo ratings yet
- Unit 3Document41 pagesUnit 3nysretNo ratings yet
- CS8351 Two Mark With AnswerDocument12 pagesCS8351 Two Mark With AnswerNandha KumarNo ratings yet
- Ee8011 Facts 2marksDocument8 pagesEe8011 Facts 2marksBALAKRISHNAN100% (1)
- Eee 3 - 4 Semester - R - 2008Document23 pagesEee 3 - 4 Semester - R - 2008BALAKRISHNANNo ratings yet
- Two single-phase furnaces connected to 3-phase mains via Scott transformersDocument2 pagesTwo single-phase furnaces connected to 3-phase mains via Scott transformersBALAKRISHNANNo ratings yet
- Ee8301 Part C 16) A)Document2 pagesEe8301 Part C 16) A)BALAKRISHNANNo ratings yet
- MIT SM Lec01 PDFDocument14 pagesMIT SM Lec01 PDFtohidi_mahboobeh_223No ratings yet
- Effects of armature reaction in DC machinesDocument2 pagesEffects of armature reaction in DC machinesBALAKRISHNANNo ratings yet
- Answer Booklet Submission SummaryDocument1 pageAnswer Booklet Submission SummaryBALAKRISHNANNo ratings yet
- Unit - Ii 1. PrepositionsDocument9 pagesUnit - Ii 1. PrepositionsBALAKRISHNANNo ratings yet
- Introduction to Service Operations ManagementDocument10 pagesIntroduction to Service Operations ManagementBALAKRISHNANNo ratings yet
- EEE 8301 Electrical Machines I Question PaperDocument3 pagesEEE 8301 Electrical Machines I Question PaperBALAKRISHNANNo ratings yet
- EE6303 Linear Integrated Circuits QuestionsDocument7 pagesEE6303 Linear Integrated Circuits QuestionsBALAKRISHNANNo ratings yet
- Cs6008-Human Computer Interaction Two Marks Question With Answers Unit - IDocument10 pagesCs6008-Human Computer Interaction Two Marks Question With Answers Unit - IDr.P.L. Rajarajeswari CSE departmentNo ratings yet
- 219 - EE8451, EE6303 Linear Integrated Circuits and Applications LICA - 2 Marks With AnswersDocument8 pages219 - EE8451, EE6303 Linear Integrated Circuits and Applications LICA - 2 Marks With AnswersBALAKRISHNANNo ratings yet
- Ee8006 Power Quality: Diploma, Anna Univ UG & PG CoursesDocument2 pagesEe8006 Power Quality: Diploma, Anna Univ UG & PG CoursesBALAKRISHNANNo ratings yet
- Introduction 1Document1 pageIntroduction 1BALAKRISHNANNo ratings yet
- Ge 6075-Professional Ethics in Engineering Unit I - Human ValuesDocument60 pagesGe 6075-Professional Ethics in Engineering Unit I - Human ValuesBALAKRISHNANNo ratings yet
- Probability and Queueing Theory: August 2012Document3 pagesProbability and Queueing Theory: August 2012BALAKRISHNANNo ratings yet
- Introduction to Service Operations ManagementDocument10 pagesIntroduction to Service Operations ManagementBALAKRISHNANNo ratings yet
- Linear Integrated CircuitsDocument22 pagesLinear Integrated CircuitsKavi ThaNo ratings yet
- Anna University Time Table for EEE ExamsDocument2 pagesAnna University Time Table for EEE ExamsBALAKRISHNANNo ratings yet
- Guidelines For Filling Up The Application Form-6 General Instructions Who Can File Form-6Document3 pagesGuidelines For Filling Up The Application Form-6 General Instructions Who Can File Form-6StuartRobNo ratings yet
- Application For The Post of Vice-Chancellor, Anna UniversityDocument10 pagesApplication For The Post of Vice-Chancellor, Anna UniversityBALAKRISHNANNo ratings yet
- توصية - مستشار زيوت التشحيمDocument4 pagesتوصية - مستشار زيوت التشحيمhasm caadNo ratings yet
- The Threat Landscape Quiz ResultsDocument5 pagesThe Threat Landscape Quiz ResultsKaskusemail88 EmailNo ratings yet
- Boiler Commissioning Procedure1Document62 pagesBoiler Commissioning Procedure1Okeyman100% (1)
- Quiz ConsolidatedDocument131 pagesQuiz ConsolidatedSudhanshu GuptaNo ratings yet
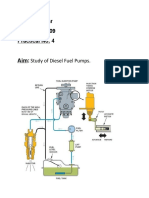
- Study of Diesel Fuel Pumps ComponentsDocument6 pagesStudy of Diesel Fuel Pumps ComponentsPro GamerssNo ratings yet
- Razwan Iqbalcv1Document3 pagesRazwan Iqbalcv1razwaniqbalNo ratings yet
- Discover Haxeflixel FullDocument182 pagesDiscover Haxeflixel FullKristian Macanga100% (3)
- InfluencerDocument198 pagesInfluencerAkanksha SethiNo ratings yet
- Citroen C4 Picasso/Grand Picasso BilmetropolenDocument5 pagesCitroen C4 Picasso/Grand Picasso BilmetropolenAlberto Miglino100% (1)
- Tesco AnalysisDocument12 pagesTesco Analysisdanny_wch7990No ratings yet
- Power Engineering May 2013Document95 pagesPower Engineering May 2013Portal studentesc - EnergeticaNo ratings yet
- Hello World in FortranDocument43 pagesHello World in Fortranhussein alsaedeNo ratings yet
- North American Free Trade Agreement: Prof. MakhmoorDocument15 pagesNorth American Free Trade Agreement: Prof. MakhmoorShikha ShuklaNo ratings yet
- Introduction, Concepts, Scope of Community Health NursingDocument32 pagesIntroduction, Concepts, Scope of Community Health Nursingmuthukumar82% (28)
- EI2 Public Benefit Organisation Written Undertaking External FormDocument1 pageEI2 Public Benefit Organisation Written Undertaking External Formshattar47No ratings yet
- Mobile Scaffold Inspection ChecklistDocument3 pagesMobile Scaffold Inspection Checklistanthony murphyNo ratings yet
- Nano-technology for Post-Harvest Management of Fruits and VegetablesDocument3 pagesNano-technology for Post-Harvest Management of Fruits and VegetablesArin RujinNo ratings yet
- Input Tax Credit (TC)Document128 pagesInput Tax Credit (TC)Sidhant GoyalNo ratings yet
- Sub Engineer Test Model PaperDocument8 pagesSub Engineer Test Model PaperZeeshan AhmadNo ratings yet
- IRS Form 13909Document2 pagesIRS Form 13909whoiscolleenlynnNo ratings yet
- Men S Health South Africa - March 2017 PDFDocument132 pagesMen S Health South Africa - March 2017 PDFAbimaelGomesNo ratings yet
- Coverage and Profiling For Real-Time Tiny KernelsDocument6 pagesCoverage and Profiling For Real-Time Tiny Kernelsanusree_bhattacharjeNo ratings yet
- MD Anderson Medical Oncology 4th Edition 2022Document1,694 pagesMD Anderson Medical Oncology 4th Edition 2022Iskandar414100% (6)
- 2019Document164 pages2019Nguyễn Sơn CaNo ratings yet
- Power Converters Simulation Lab Manual - (2015-2016)Document41 pagesPower Converters Simulation Lab Manual - (2015-2016)Leela KrishnaNo ratings yet
- Datasheet - CI 7432Document5 pagesDatasheet - CI 7432Alexandre NettoNo ratings yet
- International Journal of Biopharmaceutics: Formulation and Evaluation of Ibuprofen Loaded Maltodextrin Based ProniosomeDocument7 pagesInternational Journal of Biopharmaceutics: Formulation and Evaluation of Ibuprofen Loaded Maltodextrin Based ProniosomeNeng NurtikaNo ratings yet
- HyungJae Yang Sound Water EnvironmentDocument25 pagesHyungJae Yang Sound Water EnvironmentPepeNo ratings yet
- 9211 4 PR PE Utility Industry Low Product Range 2017Document226 pages9211 4 PR PE Utility Industry Low Product Range 2017Soporte SyeNo ratings yet
- Guide Spec DX Air Outdoor Condensing Unit 2 2017Document5 pagesGuide Spec DX Air Outdoor Condensing Unit 2 2017JamesNo ratings yet