You might also like
- The Impact of Human Resource Planning On Organizational Performance 1Document17 pagesThe Impact of Human Resource Planning On Organizational Performance 1musab100% (1)
- Glider Aerobatics ManualDocument36 pagesGlider Aerobatics ManualmichetraviNo ratings yet
- EQ RESISTANT BALSA BUILDING SAP2000Document4 pagesEQ RESISTANT BALSA BUILDING SAP2000Irpan NugrahaNo ratings yet
- Installation and Maintenance Manual: Steam FlowmeterDocument36 pagesInstallation and Maintenance Manual: Steam FlowmeterSans K100% (1)
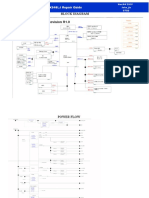
- Asus X540LJ Repair GuideDocument6 pagesAsus X540LJ Repair GuideCarlos GomesNo ratings yet
- Scalars+&+Vectors NotesDocument7 pagesScalars+&+Vectors NotesiwillinstallfortniteNo ratings yet
- SCI 2 - Physics for Engineers. Lesson 1 (1)Document57 pagesSCI 2 - Physics for Engineers. Lesson 1 (1)fortxtonly80No ratings yet
- Unit5.PDF Engg MathDocument53 pagesUnit5.PDF Engg MathSudersanaViswanathanNo ratings yet
- Vector Addition: Vectors - Motion and Forces in Two Dimensions - Lesson 1 - Vectors: Fundamentals and OperationsDocument27 pagesVector Addition: Vectors - Motion and Forces in Two Dimensions - Lesson 1 - Vectors: Fundamentals and OperationsJessica Garpillo BaasisNo ratings yet
- Chapter OneDocument11 pagesChapter OneabadittadesseNo ratings yet
- As Level Physics Revision Guide For OCRDocument44 pagesAs Level Physics Revision Guide For OCRThomas Roe100% (1)
- Lecture3-Motion in 2DDocument5 pagesLecture3-Motion in 2DPatrick SibandaNo ratings yet
- Engg PhysicsDocument335 pagesEngg PhysicsPrasanth MadhurapantulaNo ratings yet
- Introduction To VectorsDocument29 pagesIntroduction To Vectorsmuyideen abdulkareemNo ratings yet
- Vector Addition Rules and Component MethodsDocument44 pagesVector Addition Rules and Component MethodsLee-Ann LimNo ratings yet
- Scalar and Vector Quantities ExplainedDocument8 pagesScalar and Vector Quantities ExplainedFahad SBNo ratings yet
- Ch03 Physics For Scientists and EngineeringDocument43 pagesCh03 Physics For Scientists and Engineeringjohnb2bNo ratings yet
- محاضرة 2-1Document39 pagesمحاضرة 2-1OmaNo ratings yet
- Chapter IDocument12 pagesChapter InvnrevNo ratings yet
- Chapter 1Document14 pagesChapter 1abadittadesseNo ratings yet
- Physics 11th Unit 2 KinematicsDocument31 pagesPhysics 11th Unit 2 Kinematicsvisiblemotivation7No ratings yet
- Parallelogram MethodDocument5 pagesParallelogram MethodTara MurrayNo ratings yet
- Static Equilibrium of Concurrent ForcesDocument5 pagesStatic Equilibrium of Concurrent ForcesAhmed AbuNasserNo ratings yet
- Scalars and Vectors Fundamentals of Physics Halliday, Resnick & WalkerDocument16 pagesScalars and Vectors Fundamentals of Physics Halliday, Resnick & WalkerMina SamNo ratings yet
- Vectors and ScalarsDocument47 pagesVectors and ScalarseloimarodzaNo ratings yet
- Vector Addition: Sunil Kumar SinghDocument18 pagesVector Addition: Sunil Kumar SinghDhananjay LimayeNo ratings yet
- Statics - PresentationDocument164 pagesStatics - PresentationKorpy KorpyNo ratings yet
- Week 5 Vectors and ScalarsDocument6 pagesWeek 5 Vectors and ScalarsNisha JodhanNo ratings yet
- With Respect To A Defined Reference FrameDocument17 pagesWith Respect To A Defined Reference FrameMd Yusuf AnsariNo ratings yet
- MF006 Lecture 2 - Introduction To VectorsDocument32 pagesMF006 Lecture 2 - Introduction To VectorsWei WeiNo ratings yet
- 02 Me1 PDFDocument5 pages02 Me1 PDFvat007No ratings yet
- Motion in One Dimension1Document87 pagesMotion in One Dimension1mostafa_m_ibrahim2444No ratings yet
- Module 1: A Crash Course in Vectors: Lecture 1: Scalar and Vector FieldsDocument56 pagesModule 1: A Crash Course in Vectors: Lecture 1: Scalar and Vector FieldsSayan Kumar KhanNo ratings yet
- Module 3AVectors and Two Dimensional MotionDocument56 pagesModule 3AVectors and Two Dimensional MotionAlex Pecaso5No ratings yet
- Physics Chapter 3 Notes on Vectors, Motion, Projectiles & Circular MotionDocument7 pagesPhysics Chapter 3 Notes on Vectors, Motion, Projectiles & Circular MotionCanjiNo ratings yet
- Chapter - 2: Vector QuantitiesDocument20 pagesChapter - 2: Vector QuantitiesMechael gulemaNo ratings yet
- B.Sc. Physics Vector OperationsDocument20 pagesB.Sc. Physics Vector OperationsMumtazAhmadNo ratings yet
- Sample Chapter 02 Scalar Quantities and Vector Quantities in Mechanics and Motion AnalysisDocument27 pagesSample Chapter 02 Scalar Quantities and Vector Quantities in Mechanics and Motion AnalysisRonie DayonNo ratings yet
- Lecture Powerpoints: Physics: Principles With Applications, 6 EditionDocument26 pagesLecture Powerpoints: Physics: Principles With Applications, 6 EditionRavi LallNo ratings yet
- Chapter One - Lecture 1Document16 pagesChapter One - Lecture 1Arian SoleimanNo ratings yet
- Physics 4Document21 pagesPhysics 4Shivani Shree SundaramoorthyNo ratings yet
- F3Chapter 3Document25 pagesF3Chapter 3Subash MallampalliNo ratings yet
- Motion in A Plane PDFDocument18 pagesMotion in A Plane PDFRohitNo ratings yet
- Notes 1.4 - Vectors and ScalarsDocument12 pagesNotes 1.4 - Vectors and ScalarsBilly JenkinsNo ratings yet
- Lecture (1) : Vectors and ScalarsDocument20 pagesLecture (1) : Vectors and ScalarsAhmad DaqaladNo ratings yet
- Lecture Notes On Statics of Rigid BodiesDocument184 pagesLecture Notes On Statics of Rigid BodiesLeandro S. DaceraNo ratings yet
- Vector Addition: Vectors and ScalarsDocument20 pagesVector Addition: Vectors and Scalarsjoanally bagoyoNo ratings yet
- Vector Addition: Vectors and ScalarsDocument20 pagesVector Addition: Vectors and Scalarsjoanally bagoyoNo ratings yet
- Graphical Vector Addition and SubtractionDocument22 pagesGraphical Vector Addition and Subtractionpavi32No ratings yet
- Lecture Guide in Vector AnalysisDocument13 pagesLecture Guide in Vector AnalysiskennethNo ratings yet
- q1 General Physics Module 2Document13 pagesq1 General Physics Module 2Ciara Adrianne Tiongzon - ReyesNo ratings yet
- q1 General Physics Module 2Document13 pagesq1 General Physics Module 2Ciara Adrianne Tiongzon - ReyesNo ratings yet
- Experiment 2 (Physics For Eng)Document9 pagesExperiment 2 (Physics For Eng)RESI-AURIN, JK L.No ratings yet
- VECTORS ReportDocument100 pagesVECTORS ReportWabu No. 5No ratings yet
- Q2 Module 3 VectorsDocument17 pagesQ2 Module 3 VectorsIrene DulayNo ratings yet
- CHP 2 - Force SystemDocument15 pagesCHP 2 - Force SystemSagheer AhmedNo ratings yet
- PHYSICSexyDocument5 pagesPHYSICSexyjeloelydacumosNo ratings yet
- Chapter 2. Mathematical MethodsDocument17 pagesChapter 2. Mathematical Methodsdeep34No ratings yet
- Module 2 VectorsDocument16 pagesModule 2 VectorsKrizel CalasaraNo ratings yet
- Module 2 - Vector and ScalarDocument23 pagesModule 2 - Vector and ScalarHanah ArzNo ratings yet
- Introductory PhysicsDocument38 pagesIntroductory Physicssundari rangarajNo ratings yet
- G 9 Physics1. Module 2Document10 pagesG 9 Physics1. Module 2Marvi TejeroNo ratings yet
- UNIT 1-PHY 131 Chapter 2 - Introduction To VectorsDocument35 pagesUNIT 1-PHY 131 Chapter 2 - Introduction To VectorscharlieNo ratings yet
- Lecture 14-Vectors 1Document23 pagesLecture 14-Vectors 1bananaNo ratings yet
- Impact of Human Resource Planning On TheDocument53 pagesImpact of Human Resource Planning On ThemusabNo ratings yet
- The Impact of Human Resource Planning on Organizational PerformanceDocument71 pagesThe Impact of Human Resource Planning on Organizational PerformancemusabNo ratings yet
- Basic Excel FunctionsDocument4 pagesBasic Excel FunctionsmusabNo ratings yet
- I. Proposed Topic 1 The Role of Human Resource Management For Developing The Organizational CultureDocument11 pagesI. Proposed Topic 1 The Role of Human Resource Management For Developing The Organizational CulturemusabNo ratings yet
- The Impact of Human Resource Planning On Organizational PerformanceDocument2 pagesThe Impact of Human Resource Planning On Organizational PerformancemusabNo ratings yet
- The Impact of Human Resource Planning on Organizational PerformanceDocument13 pagesThe Impact of Human Resource Planning on Organizational Performancemusab100% (3)
- Labor Rights - Textile Industry in KarachiDocument15 pagesLabor Rights - Textile Industry in KarachimusabNo ratings yet
- Report TapalDocument20 pagesReport TapalMahwish Bilal AhmedNo ratings yet
- HRM Practices Impact on Rural Bank PerformanceDocument11 pagesHRM Practices Impact on Rural Bank PerformancemusabNo ratings yet
- Assessment 2 - SolvedDocument13 pagesAssessment 2 - SolvedmusabNo ratings yet
- HSF - Goals StudyDocument3 pagesHSF - Goals StudymusabNo ratings yet
- Experiment 5 - Projectile Motion Mathematical Description of Projectile MotionDocument5 pagesExperiment 5 - Projectile Motion Mathematical Description of Projectile MotionmusabNo ratings yet
- Challenges in Logistics and Supply Chain: Management at DHL ExpressDocument42 pagesChallenges in Logistics and Supply Chain: Management at DHL ExpressmusabNo ratings yet
- Em WavesDocument8 pagesEm WavesmusabNo ratings yet
- Unfair and Abusive Labor Practices in Textile Industry of Karachi - 2Document16 pagesUnfair and Abusive Labor Practices in Textile Industry of Karachi - 2musabNo ratings yet
- Ctivity AlendarDocument3 pagesCtivity AlendarmusabNo ratings yet
- Experiment 5 - Projectile Motion Mathematical Description of Projectile MotionDocument5 pagesExperiment 5 - Projectile Motion Mathematical Description of Projectile MotionmusabNo ratings yet
- Agile Tools - Marketing ManagementDocument9 pagesAgile Tools - Marketing ManagementmusabNo ratings yet
- Experiment 5 - Projectile Motion Mathematical Description of Projectile MotionDocument5 pagesExperiment 5 - Projectile Motion Mathematical Description of Projectile MotionmusabNo ratings yet
- Pre-Launch: LaunchingDocument2 pagesPre-Launch: LaunchingmusabNo ratings yet
- Sith Kop 004Document16 pagesSith Kop 004musabNo ratings yet
- Labour and Employment Law-A Profile On PakistanDocument13 pagesLabour and Employment Law-A Profile On PakistanLaaj ChaudhryNo ratings yet
- You Want A Confederate Monument My Body Is A Confederate MonumentDocument4 pagesYou Want A Confederate Monument My Body Is A Confederate MonumentmusabNo ratings yet
- Sith Kop 004Document16 pagesSith Kop 004musabNo ratings yet
- Sith Kop 004Document16 pagesSith Kop 004musabNo ratings yet
- Bio and Functional MaterialsDocument42 pagesBio and Functional MaterialsmusabNo ratings yet
- Lab 04 - The Simple PendulumDocument5 pagesLab 04 - The Simple PendulummusabNo ratings yet
- Sith Kop 004Document16 pagesSith Kop 004musabNo ratings yet
- Electronicbekm 2023Document159 pagesElectronicbekm 2023Bekir MouradNo ratings yet
- Em 111-Calculus 1 (Differential Calculus) : Graph of A FunctionDocument3 pagesEm 111-Calculus 1 (Differential Calculus) : Graph of A FunctionJohn Philip NadalNo ratings yet
- Fire Alarm On Ms Word 22Document39 pagesFire Alarm On Ms Word 22Sandeep YapashettiNo ratings yet
- Course WildeDocument76 pagesCourse Wildeberserker2236No ratings yet
- Lesson Plan 6 Electrical Installation and Maintenance I. ObjectivesDocument6 pagesLesson Plan 6 Electrical Installation and Maintenance I. Objectivescecille mañacapNo ratings yet
- Energy Systems and Resources ExplainedDocument22 pagesEnergy Systems and Resources ExplainedTayani Tedson KumwendaNo ratings yet
- SE Current Monitoring Series H708-S6: DangerDocument3 pagesSE Current Monitoring Series H708-S6: DangerIsrael AldabaNo ratings yet
- Spur Gears Component GeneratorDocument4 pagesSpur Gears Component GeneratorRodrigo NavarreteNo ratings yet
- Q3 Science 5 Periodical Test Questions No HeadingDocument4 pagesQ3 Science 5 Periodical Test Questions No HeadingWea Joy Mantolino-MasNo ratings yet
- Astm D5333Document3 pagesAstm D5333dghadiaNo ratings yet
- Class 12 Physics Notes on EM Waves and Communication SystemsDocument13 pagesClass 12 Physics Notes on EM Waves and Communication SystemsJaseela NaufalNo ratings yet
- Effect of Temperature and Cooling Rates on the α+β Morphology of Ti-6Al-4V Alloy Effect of Temperature and Cooling Rates on the α+β Morphology of Ti-6Al-4V AlloyDocument8 pagesEffect of Temperature and Cooling Rates on the α+β Morphology of Ti-6Al-4V Alloy Effect of Temperature and Cooling Rates on the α+β Morphology of Ti-6Al-4V AlloysaltbathNo ratings yet
- FG Wilson 6.8-22 kVA CAE Polymer Acoustic EnclosureDocument4 pagesFG Wilson 6.8-22 kVA CAE Polymer Acoustic EnclosurescribdledeeNo ratings yet
- X X X XX X X XX XXX - X: Nomenclature DetailsDocument3 pagesX X X XX X X XX XXX - X: Nomenclature DetailsAlvaro DiazNo ratings yet
- An Alternative Mathematical Model For Special Relativity Guy Tsabary and Aviv CensorDocument17 pagesAn Alternative Mathematical Model For Special Relativity Guy Tsabary and Aviv CensorYotam KatzirNo ratings yet
- Foundation Calculation Sheet: Title DescriptionDocument10 pagesFoundation Calculation Sheet: Title DescriptionrobianggaNo ratings yet
- Horizontal Single-Stage Centrifugal PumpsDocument52 pagesHorizontal Single-Stage Centrifugal PumpsMorgan HengNo ratings yet
- PCV CableDocument12 pagesPCV CableMahamud MusaNo ratings yet
- BSI Standards Publication: Uninterruptible Power Systems (UPS)Document100 pagesBSI Standards Publication: Uninterruptible Power Systems (UPS)Suresh KrishnanNo ratings yet
- Hydraulic Schematic SymbolsDocument8 pagesHydraulic Schematic SymbolsJustice MachiwanaNo ratings yet
- Torque Team V-Belt: Installation GuideDocument2 pagesTorque Team V-Belt: Installation GuideMary Huaylla ANo ratings yet
- Acudyne 1000 - Brochure - FormulaciónDocument12 pagesAcudyne 1000 - Brochure - FormulaciónWendy González Luna100% (1)
- Me Lab 6Document9 pagesMe Lab 6BensoyNo ratings yet
- 83 Model Question Paper Kan&EngDocument7 pages83 Model Question Paper Kan&EngAbdurNo ratings yet
- Course Title Instructor E Mail Office EL Office Hours ExtbookDocument2 pagesCourse Title Instructor E Mail Office EL Office Hours ExtbookKhairi SalehNo ratings yet
- 3G3mx2-v2 Ds e 1 1 csm1126864Document54 pages3G3mx2-v2 Ds e 1 1 csm1126864Pertti HänninenNo ratings yet