You might also like
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Itil4 A Pocket Guide Jan Van BonDocument21 pagesItil4 A Pocket Guide Jan Van BonEngineer & MBA32% (19)
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
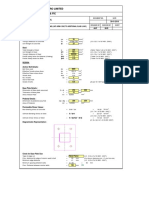
- Design of Base Plate LKP Arm 4-F-30.01.2018Document5 pagesDesign of Base Plate LKP Arm 4-F-30.01.2018HarikrishnaNo ratings yet
- Solution Manual For Microeconomic TheoryDocument8 pagesSolution Manual For Microeconomic TheoryChristian Jo Enriquez100% (1)
- Solutions Chapter 4 PDFDocument31 pagesSolutions Chapter 4 PDFNaresh SehdevNo ratings yet
- A545 000-16-51 VL 02 Vendor List - Instrumentation - DORC - PackagesDocument12 pagesA545 000-16-51 VL 02 Vendor List - Instrumentation - DORC - PackagesnavaronefraNo ratings yet
- XN-Series Clinical Case Report Vol. 2Document71 pagesXN-Series Clinical Case Report Vol. 2Görünmez gorunur100% (3)
- PSD 323 Module 4 Compression MembersDocument21 pagesPSD 323 Module 4 Compression MembersEdrick BelerNo ratings yet
- General Runge Kutta FormulasDocument5 pagesGeneral Runge Kutta FormulasM.Y M.ANo ratings yet
- General Runge Kutta FormulasDocument5 pagesGeneral Runge Kutta FormulasM.Y M.ANo ratings yet
- Runge-Kutta MethodsDocument5 pagesRunge-Kutta MethodsRyan Sullenberger100% (7)
- Mathcad - Paz Ejemplo 11 - 1Document4 pagesMathcad - Paz Ejemplo 11 - 1OannesNo ratings yet
- Serie de Potencias 6Document2 pagesSerie de Potencias 6Eduardo Daniel Flores CarpioNo ratings yet
- DILE NO A LA PLANCHA (Kim Jhon Phatti Satto)Document6 pagesDILE NO A LA PLANCHA (Kim Jhon Phatti Satto)Kimsito Al TlvNo ratings yet
- M F F F F: Pregunta Nº1Document3 pagesM F F F F: Pregunta Nº1BastianRodriguezNo ratings yet
- Tutorial 6Document2 pagesTutorial 6thweesha tanejaNo ratings yet
- Pages From Chapter 18-5Document10 pagesPages From Chapter 18-5taNo ratings yet
- Edos Metodos NumericosDocument15 pagesEdos Metodos NumericosMarjorie BlossiersNo ratings yet
- Edos Metodos NumericosDocument15 pagesEdos Metodos NumericosMarjorie BlossiersNo ratings yet
- MST207 04Document6 pagesMST207 04pigcowdogNo ratings yet
- Example 4: Solve The Equation: A 2 Ac 4) B (B XDocument4 pagesExample 4: Solve The Equation: A 2 Ac 4) B (B XKelli FloresNo ratings yet
- Eso208 Tutorial SolutionDocument10 pagesEso208 Tutorial SolutionyhjklNo ratings yet
- Rješenje:: y Z T Z yDocument7 pagesRješenje:: y Z T Z yNatasa VujovicNo ratings yet
- Example 4: Solve The Equation: A 2 Ac 4) B (B XDocument13 pagesExample 4: Solve The Equation: A 2 Ac 4) B (B XKelli FloresNo ratings yet
- Example 4: Solve The Equation: A 2 Ac 4) B (B XDocument5 pagesExample 4: Solve The Equation: A 2 Ac 4) B (B XKelli FloresNo ratings yet
- Example 4: Solve The Equation: A 2 Ac 4) B (B XDocument7 pagesExample 4: Solve The Equation: A 2 Ac 4) B (B XKelli FloresNo ratings yet
- Contoh Soal Di Buku Anstruk: Ndof 2.Nj-Nr 2.4-2 6Document48 pagesContoh Soal Di Buku Anstruk: Ndof 2.Nj-Nr 2.4-2 6Salsabila AshmaliaNo ratings yet
- Taller: Nombre: Tatiana Grosso Alaguna Codigo: 1013659955 Fisica 1 Curso 24Document6 pagesTaller: Nombre: Tatiana Grosso Alaguna Codigo: 1013659955 Fisica 1 Curso 24Tatiana GrossoNo ratings yet
- Example 4: Solve The Equation: A 2 Ac 4) B (B XDocument18 pagesExample 4: Solve The Equation: A 2 Ac 4) B (B XKelli FloresNo ratings yet
- Taller Calculo FinalDocument13 pagesTaller Calculo FinalRicardo Mojica CorreaNo ratings yet
- Chapter 2Document9 pagesChapter 2Sruthi NukalaNo ratings yet
- DMC ExQuiz SolDocument112 pagesDMC ExQuiz SolRafe ANo ratings yet
- Chegg Esfuerzos PrincipalesDocument4 pagesChegg Esfuerzos PrincipalesGuillermo DiazNo ratings yet
- Batang Tekan Fix-FixDocument22 pagesBatang Tekan Fix-FixIntan RizkyaniNo ratings yet
- d8 - 2017 S3E SA2 P2 SolutionsDocument11 pagesd8 - 2017 S3E SA2 P2 SolutionsWilliamNo ratings yet
- Jee Mains August 27 2021 Shift2Document45 pagesJee Mains August 27 2021 Shift2Atharva Sheersh PandeyNo ratings yet
- Tutorial6 SolDocument4 pagesTutorial6 Soldhindsaharmanjatt2003No ratings yet
- Unadm Universidad Abierta y A Distancia de MéxicoDocument8 pagesUnadm Universidad Abierta y A Distancia de MéxicoFrida JiménezNo ratings yet
- Maths AssigmentDocument8 pagesMaths AssigmentAmanjot KaurNo ratings yet
- Numerical Solution of Ordinary Differential EquationsDocument30 pagesNumerical Solution of Ordinary Differential EquationsAlexis Bryan RiveraNo ratings yet
- Cal Exam - Apr 2022 FUV - SolnsDocument3 pagesCal Exam - Apr 2022 FUV - SolnsNuong PhanNo ratings yet
- Probar Que Los Limites No Existen A. Lim: Tarea N°6Document14 pagesProbar Que Los Limites No Existen A. Lim: Tarea N°6MIGUELNo ratings yet
- Number Theory: The Euclidean Algorithm EmercadoDocument15 pagesNumber Theory: The Euclidean Algorithm Emercadokepive strugglesNo ratings yet
- Deber 1 OptimizacionDocument3 pagesDeber 1 OptimizacionAndrés ToalaNo ratings yet
- CH 04Document26 pagesCH 04HOSSEIN POORKHADEM NAMINNo ratings yet
- Mechanics of MachineDocument7 pagesMechanics of MachineEmmanuel KutaniNo ratings yet
- 202y05mt1 PDFDocument3 pages202y05mt1 PDFIvanovka03No ratings yet
- P8 10Document2 pagesP8 10honestcheaterNo ratings yet
- F (X +H) 5 (X +H) XDocument8 pagesF (X +H) 5 (X +H) XAmanjot KaurNo ratings yet
- Ugeseddel 3Document3 pagesUgeseddel 3dc42hpxxvqNo ratings yet
- Solution Manual For Elementary Differential Equations With Boundary Value Problems 2nd Edition by KohlerDocument4 pagesSolution Manual For Elementary Differential Equations With Boundary Value Problems 2nd Edition by Kohlera887562433No ratings yet
- AITS 2324 PT I JEEM TD SolDocument20 pagesAITS 2324 PT I JEEM TD Solshouryaswami6No ratings yet
- MAS 201 Spring 2020 (CD) Differential Equations and ApplicationsDocument20 pagesMAS 201 Spring 2020 (CD) Differential Equations and ApplicationsMinJae KimNo ratings yet
- ODE: Laplace's TransformDocument2 pagesODE: Laplace's TransformRaulNo ratings yet
- Solution Manual For Engineering Mechanics Dynamics 4Th Edition Pytel Kiusalaas Isbn 1305579208 9781305579200 Full Chapter PDFDocument36 pagesSolution Manual For Engineering Mechanics Dynamics 4Th Edition Pytel Kiusalaas Isbn 1305579208 9781305579200 Full Chapter PDFruby.kinkel639100% (11)
- Perhitungan Asam KuatDocument6 pagesPerhitungan Asam KuatYulle RachmaNo ratings yet
- Assignment 1: Students: Esteban Morales & Rodrigo ReyesDocument9 pagesAssignment 1: Students: Esteban Morales & Rodrigo ReyesPablo Moreno OlivaNo ratings yet
- 2.003SC Engineering Dynamics Quiz 3 Solutions Problem 1 SolutionDocument5 pages2.003SC Engineering Dynamics Quiz 3 Solutions Problem 1 SolutionJanatan ChoiNo ratings yet
- M M Sec: WaterDocument8 pagesM M Sec: WaterPHƯƠNG HỒ ĐỖ UYÊNNo ratings yet
- AJC H2Maths 2012prelim P1 SolutionDocument6 pagesAJC H2Maths 2012prelim P1 SolutionMelinda BowmanNo ratings yet
- Computer Application in Engineering Homework II: Mehmet Fatih Reyhan ID: 110170002Document4 pagesComputer Application in Engineering Homework II: Mehmet Fatih Reyhan ID: 110170002fatih reyhanNo ratings yet
- Useful Methods For Solving Quantum SystemsDocument8 pagesUseful Methods For Solving Quantum SystemsChang PeterNo ratings yet
- Anti Trabajo FinalDocument310 pagesAnti Trabajo Finalvladimir quito granadosNo ratings yet
- S (s+20) (s+20) (S +20) S s+20) (s+20) : Rumus PerkalianDocument3 pagesS (s+20) (s+20) (S +20) S s+20) (s+20) : Rumus PerkalianMufidah NuroainiNo ratings yet
- Bairstow Method1Document8 pagesBairstow Method1M.Y M.ANo ratings yet
- An Investigator Has Reported The Data Tabulated Below For An ExperimentDocument4 pagesAn Investigator Has Reported The Data Tabulated Below For An ExperimentM.Y M.A0% (1)
- Interpolation and Polynomial ApproximationDocument12 pagesInterpolation and Polynomial ApproximationM.Y M.ANo ratings yet
- Numerical Differentiation 01Document8 pagesNumerical Differentiation 01M.Y M.ANo ratings yet
- Bessel Polynomials and Bessel FunctionsDocument2 pagesBessel Polynomials and Bessel FunctionsM.Y M.ANo ratings yet
- IntegrateDocument3 pagesIntegrateM.Y M.ANo ratings yet
- Numerical Analysis 1st Semester Lecture 3Document4 pagesNumerical Analysis 1st Semester Lecture 3M.Y M.ANo ratings yet
- MTL107 Set 8Document5 pagesMTL107 Set 8M.Y M.ANo ratings yet
- Eigenvalues and EigenvectorsDocument8 pagesEigenvalues and EigenvectorsM.Y M.ANo ratings yet
- MATH2071: LAB 8: The Eigenvalue ProblemDocument16 pagesMATH2071: LAB 8: The Eigenvalue ProblemM.Y M.ANo ratings yet
- Bessel PolynomialsDocument15 pagesBessel PolynomialsM.Y M.ANo ratings yet
- Math/CS 466/666: Shifted Inverse Power Method Lab: 8 Complex Eigenvalues For A Real 5x5 Matrix ImDocument4 pagesMath/CS 466/666: Shifted Inverse Power Method Lab: 8 Complex Eigenvalues For A Real 5x5 Matrix ImM.Y M.ANo ratings yet
- BTX3110 Exam - Tri B 20 TAKE HOME PDFDocument3 pagesBTX3110 Exam - Tri B 20 TAKE HOME PDFJustin NatanaelNo ratings yet
- 11th Convocation NoticeDocument2 pages11th Convocation NoticeRockon UddeanNo ratings yet
- Murat Kahveci, MaryKay Orgill (Eds.) - Affective Dimensions in Chemistry Education (2015, Springer-Verlag Berlin Heidelberg) PDFDocument322 pagesMurat Kahveci, MaryKay Orgill (Eds.) - Affective Dimensions in Chemistry Education (2015, Springer-Verlag Berlin Heidelberg) PDFTriharyatiNo ratings yet
- Kindergarten Children Developing Numeracy ConceptsDocument14 pagesKindergarten Children Developing Numeracy ConceptsDeeNo ratings yet
- Acsanm.9b02407 IMPDocument14 pagesAcsanm.9b02407 IMPDharmesh VaradeNo ratings yet
- Green ComputingDocument9 pagesGreen ComputingManojNo ratings yet
- Learningmodule: Disciplines and Ideas in The Social SciencesDocument41 pagesLearningmodule: Disciplines and Ideas in The Social Sciencesmark gempisaw100% (1)
- PTE Worksheet 1 AnswersDocument3 pagesPTE Worksheet 1 AnswerscnaleenNo ratings yet
- NSTP Evaluation of Activities 2Document1 pageNSTP Evaluation of Activities 2Krey SalazarNo ratings yet
- Ground PressureDocument7 pagesGround PressurenathansolaiNo ratings yet
- Operating Manual: Air Conditioner Wall Mounted TypeDocument9 pagesOperating Manual: Air Conditioner Wall Mounted Typenek101No ratings yet
- GUTEX Sortimentuebersicht-Preisliste-En Gueltig Ab 09-2021Document40 pagesGUTEX Sortimentuebersicht-Preisliste-En Gueltig Ab 09-2021Georgiana GheorgheNo ratings yet
- Plag 2Document2 pagesPlag 2Ola PolakNo ratings yet
- HR Practices in The Indian Oil & Gas IndustryDocument13 pagesHR Practices in The Indian Oil & Gas IndustrygoutamkgNo ratings yet
- Capes So For Asset BrochureDocument4 pagesCapes So For Asset Brochuremau_mmx5738No ratings yet
- Universal Beams PDFDocument2 pagesUniversal Beams PDFbrodieNo ratings yet
- Rothman Greenland 05 Types Epi StudiesDocument12 pagesRothman Greenland 05 Types Epi StudiesÁdám MolnárNo ratings yet
- The Digital SelfDocument5 pagesThe Digital Selfouleea ugustineNo ratings yet
- PP41 Rev.3Document1 pagePP41 Rev.3Ashish ChackoNo ratings yet
- Katalog E800 WEB EN PDFDocument316 pagesKatalog E800 WEB EN PDFIventNo ratings yet
- Analisis Estructural Hibbeler - SolucionarioDocument403 pagesAnalisis Estructural Hibbeler - SolucionarioMarvin Joel Seminario AlvarezNo ratings yet
- Busines Statistics Chap IDocument28 pagesBusines Statistics Chap IyaredmanhailuNo ratings yet
- E Ticket Pakuan 1Document2 pagesE Ticket Pakuan 1Esha Septian Pesilat KbpcNo ratings yet
- A COMSOL Interface To Cape-Open Compliant Physical and Thermodynamic Property PackagesDocument13 pagesA COMSOL Interface To Cape-Open Compliant Physical and Thermodynamic Property PackagesGiu Ali Mamani PacoNo ratings yet
- Getting Started Guide: © 2013 Techsmith Corporation. All Rights ReservedDocument20 pagesGetting Started Guide: © 2013 Techsmith Corporation. All Rights ReservedsilviugeorgesanduNo ratings yet