You might also like
- SIM Electric Field and PotentialDocument6 pagesSIM Electric Field and PotentialAbel RodriguezNo ratings yet
- GATE Structure Qwestion PDFDocument117 pagesGATE Structure Qwestion PDFmd alkarim100% (2)
- Lab Manual For Theory of Structure IIDocument11 pagesLab Manual For Theory of Structure IIUral Prakash KafleNo ratings yet
- Soil MechanicsDocument56 pagesSoil MechanicsSeidu ZayedeNo ratings yet
- Modeling, Simulation and Control of A Robotic ArmDocument7 pagesModeling, Simulation and Control of A Robotic ArmaseptaNo ratings yet
- Cbse Test Paper-01 CLASS - X Science (Electricity and Its Effects)Document5 pagesCbse Test Paper-01 CLASS - X Science (Electricity and Its Effects)krishnareddy_chintalaNo ratings yet
- Advanced Foundation Engineering Course Outline AASTUDocument2 pagesAdvanced Foundation Engineering Course Outline AASTUbini100% (1)
- Prepared BY Dr. Mohammed Kadhum FekheraldinDocument55 pagesPrepared BY Dr. Mohammed Kadhum Fekheraldinhemantkle2uNo ratings yet
- Footing Design PDFDocument7 pagesFooting Design PDFskanska07070No ratings yet
- Reinforced Concrete Design Solution Manual 7th EditionDocument5 pagesReinforced Concrete Design Solution Manual 7th EditionEdmond Orena Bautista0% (2)
- Lecture Notes PPT 4 PDFDocument17 pagesLecture Notes PPT 4 PDFDrRoja A RNo ratings yet
- Biaxial Column DesignDocument21 pagesBiaxial Column DesignsalmanNo ratings yet
- Short Columns by CharifDocument21 pagesShort Columns by CharifMiski45No ratings yet
- Build 139 36 Design Right Free Standing Timber DecksDocument3 pagesBuild 139 36 Design Right Free Standing Timber Deckssuejack2020No ratings yet
- Frame Analysis PDFDocument56 pagesFrame Analysis PDFAKSNo ratings yet
- Footing Soil Pressure From Biaxial LoadingDocument18 pagesFooting Soil Pressure From Biaxial LoadingSon NguyenNo ratings yet
- Lateral Loads ResistanceDocument23 pagesLateral Loads ResistanceAbdelrahman Hassan El-MallaNo ratings yet
- Important RCC Questions-Short and LongDocument15 pagesImportant RCC Questions-Short and LongmailjoelsamuelNo ratings yet
- Structural Analysis NotesDocument166 pagesStructural Analysis NotesdunyNo ratings yet
- Reinforced Concrete - I DMU Lecture NotesDocument206 pagesReinforced Concrete - I DMU Lecture NotesAntenehNo ratings yet
- Chapter # 7 - Design of One Way SlabsDocument62 pagesChapter # 7 - Design of One Way SlabsPharo TotNo ratings yet
- Column Interaction Diagram PlotsDocument8 pagesColumn Interaction Diagram PlotsptdcaliguidNo ratings yet
- 1 Slope Deflection Method For Statically Indeterminate BeamsDocument39 pages1 Slope Deflection Method For Statically Indeterminate BeamsFirdaus DausNo ratings yet
- For Construction Technology and Management: Instructor: Amsalu ADocument200 pagesFor Construction Technology and Management: Instructor: Amsalu AtazebNo ratings yet
- Chapter - 5 Torsion in Reinforced Concrete MembersDocument8 pagesChapter - 5 Torsion in Reinforced Concrete MembersHelen NegashNo ratings yet
- Reinforced Concrete Design: Dr. Nader OkashaDocument38 pagesReinforced Concrete Design: Dr. Nader OkashaMohamed Nk100% (1)
- Stability & Determinacy of TrussesDocument5 pagesStability & Determinacy of TrussesSmile CollectivesNo ratings yet
- Haramaya University Haramaya Institute of Technology Department of Civil Engineering Building Construction (Ceeg-3093) 4.1 FoundationDocument31 pagesHaramaya University Haramaya Institute of Technology Department of Civil Engineering Building Construction (Ceeg-3093) 4.1 FoundationMuaz HararNo ratings yet
- Lecture-Three Moment TheoremDocument17 pagesLecture-Three Moment TheoremIMJ JNo ratings yet
- Designed and Detailed According To IS 456 As An Ordinary Moment Resisting Frame Also Called Ordinary Concrete FrameDocument3 pagesDesigned and Detailed According To IS 456 As An Ordinary Moment Resisting Frame Also Called Ordinary Concrete FrameAnonymous Gye18jNo ratings yet
- Structural Design of Multi-Story BuildingDocument17 pagesStructural Design of Multi-Story BuildinggundulpNo ratings yet
- Ruwan Rajapakse, CCM, CCE, PE (Auth.) - Pile Design and Construction Rules of Thumb-Elsevier - Butterworth-Heinemann (2008)Document420 pagesRuwan Rajapakse, CCM, CCE, PE (Auth.) - Pile Design and Construction Rules of Thumb-Elsevier - Butterworth-Heinemann (2008)Daniel IshayaNo ratings yet
- Standard Notes CBE29-3 Construction in Civil Engineering 20150222Document37 pagesStandard Notes CBE29-3 Construction in Civil Engineering 20150222Genie LoNo ratings yet
- Concrete Slab Design - Aci 318Document4 pagesConcrete Slab Design - Aci 318Kutty MansoorNo ratings yet
- Ce 208Document58 pagesCe 208julesNo ratings yet
- Staad Pro-Modeling of A Grid BeamDocument7 pagesStaad Pro-Modeling of A Grid BeamV.m. Rajan0% (1)
- Structural Engineering Design Assignments PDFDocument7 pagesStructural Engineering Design Assignments PDFfegenbushNo ratings yet
- Lecture 5 09-29-2021 - Development, Anchorage & Splicing of ReinforcementDocument99 pagesLecture 5 09-29-2021 - Development, Anchorage & Splicing of ReinforcementMoh Sal100% (1)
- Moment DistributionDocument153 pagesMoment DistributionHerbert P. BacosaNo ratings yet
- L Shaped ColumnDocument18 pagesL Shaped ColumnMahmood Mufti100% (1)
- Steel Chapter 6 - Beam ColumnsDocument56 pagesSteel Chapter 6 - Beam ColumnsSana'a AamirNo ratings yet
- Foundation Engineering (PDF) File PDFDocument44 pagesFoundation Engineering (PDF) File PDFRebwar Ata M.Aldeen100% (1)
- Bending Stresses in BeamsDocument30 pagesBending Stresses in BeamsdvarsastryNo ratings yet
- ETABS ExampleDocument40 pagesETABS ExampleRaj ShahNo ratings yet
- ECS226 - Chapter 4 Buckling of ColumnDocument34 pagesECS226 - Chapter 4 Buckling of ColumnYasmin QashrinaNo ratings yet
- Building 4 Storey Analysis in StaadDocument76 pagesBuilding 4 Storey Analysis in StaadAman SinghNo ratings yet
- Advantages and DisadvantagesDocument14 pagesAdvantages and Disadvantagespaul machariaNo ratings yet
- Module 3 Compression Members Lec #1Document5 pagesModule 3 Compression Members Lec #1k. NotujNo ratings yet
- C 9 - Long ColumnsDocument29 pagesC 9 - Long ColumnsRekanNo ratings yet
- First Floor Roof Slab and Staircase Head Room Details 3Document1 pageFirst Floor Roof Slab and Staircase Head Room Details 3Shaila JogiNo ratings yet
- Vertical Loads On Building Frames: Assumptions For The Analysis of Girders Using Approximate AnalysisDocument10 pagesVertical Loads On Building Frames: Assumptions For The Analysis of Girders Using Approximate AnalysisNeven Ahmed HassanNo ratings yet
- Columns-Real Life Problems & Their SolutionsDocument33 pagesColumns-Real Life Problems & Their SolutionsAteeq RehmanNo ratings yet
- Structural Analysis - I Question Bank PDFDocument16 pagesStructural Analysis - I Question Bank PDFSayed Urooj AbbasNo ratings yet
- Force MethodsDocument33 pagesForce Methodsjackie_9227No ratings yet
- Base Plate Design PDFDocument21 pagesBase Plate Design PDFdiajengangelNo ratings yet
- Lecture 3 - Influence LinesDocument87 pagesLecture 3 - Influence LinesMary Dominique OnateNo ratings yet
- Hib Bler Arches ExamplesDocument3 pagesHib Bler Arches ExamplesKellesia WilliamsNo ratings yet
- Engineering Mechanics: TrussesDocument43 pagesEngineering Mechanics: Trussescoolarvreddy100% (2)
- Sweeney MECH610 ProjectDocument19 pagesSweeney MECH610 Projectعبدالرحمن احمدNo ratings yet
- Modeling, Simulation and Control of A Robotic Arm PDFDocument7 pagesModeling, Simulation and Control of A Robotic Arm PDFshivaramreddyNo ratings yet
- Sample Exam Questions With AnswersDocument5 pagesSample Exam Questions With AnswersMauricio PresotoNo ratings yet
- WATER DEMAND - Docx ASSIGNMENTDocument7 pagesWATER DEMAND - Docx ASSIGNMENTJuanithaNo ratings yet
- Design of Gravel RoadsDocument16 pagesDesign of Gravel RoadsJuanithaNo ratings yet
- 4.hydraulics of Storage and PumpsDocument18 pages4.hydraulics of Storage and PumpsJuanithaNo ratings yet
- Assignment HesabuDocument11 pagesAssignment HesabuJuanithaNo ratings yet
- Past Scheme-1Document27 pagesPast Scheme-1JuanithaNo ratings yet
- Surface DressingDocument17 pagesSurface DressingJuanithaNo ratings yet
- Design of Rigid Pavements and AnalysisDocument68 pagesDesign of Rigid Pavements and AnalysisJuanithaNo ratings yet
- 8.water Quality-1Document36 pages8.water Quality-1JuanithaNo ratings yet
- WATER DEMAND - Docx ASSIGNMENTDocument7 pagesWATER DEMAND - Docx ASSIGNMENTJuanithaNo ratings yet
- Warm Up Quantity SurveyDocument28 pagesWarm Up Quantity SurveyJuanithaNo ratings yet
- PistonDocument4 pagesPistonJuanithaNo ratings yet
- Bricks Today: History of Clay BricksDocument1 pageBricks Today: History of Clay BricksJuanithaNo ratings yet
- LECTURE 2 ORGANIZATIONAL STRUCTURES and LEADERSHIPDocument27 pagesLECTURE 2 ORGANIZATIONAL STRUCTURES and LEADERSHIPJuanithaNo ratings yet
- 16ce117 Sa-IDocument24 pages16ce117 Sa-INishal CalebNo ratings yet
- My CRUSHED ROCKS AND STONES FOR BASE COURSEDocument9 pagesMy CRUSHED ROCKS AND STONES FOR BASE COURSEJuanitha100% (1)
- Table1.0 Material Properties of Aggregates Test Conducted of Coarse and Fine Aggregates Coarse Aggregates Fine AggregatesDocument4 pagesTable1.0 Material Properties of Aggregates Test Conducted of Coarse and Fine Aggregates Coarse Aggregates Fine AggregatesJuanithaNo ratings yet
- Compressive Strength TestDocument14 pagesCompressive Strength TestJuanithaNo ratings yet
- Mbeya University of Science and Tchnology GSB2205 Computer Programming II Cob 2202 Object Oriented ProgrammingDocument1 pageMbeya University of Science and Tchnology GSB2205 Computer Programming II Cob 2202 Object Oriented ProgrammingJuanithaNo ratings yet
- Mbeya University of Science and TechnologyDocument5 pagesMbeya University of Science and TechnologyJuanithaNo ratings yet
- Nelson Project III Phase2 Elevation 1Document1 pageNelson Project III Phase2 Elevation 1JuanithaNo ratings yet
- Gas Supply and ControlDocument8 pagesGas Supply and ControlJuanithaNo ratings yet
- Nelson Project III Phase2 Elevation 2Document1 pageNelson Project III Phase2 Elevation 2JuanithaNo ratings yet
- ENGI6705 StructuralAnalysis ClassNotes3Document39 pagesENGI6705 StructuralAnalysis ClassNotes3s149653No ratings yet
- PIPE Asignment Kifanyi PDFDocument11 pagesPIPE Asignment Kifanyi PDFJuanithaNo ratings yet
- Maths Class Notes PDFDocument95 pagesMaths Class Notes PDFJuanithaNo ratings yet
- Solved Problems PDFDocument23 pagesSolved Problems PDFJuanithaNo ratings yet
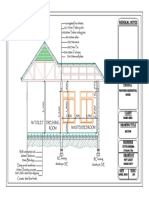
- SECTION of Building PlanDocument1 pageSECTION of Building PlanJuanithaNo ratings yet
- Material Density Weight and ShrinkageDocument4 pagesMaterial Density Weight and ShrinkageJuanithaNo ratings yet
- Question3 PDFDocument1 pageQuestion3 PDFJuanithaNo ratings yet
- OpticsDocument29 pagesOpticsVr MageshNo ratings yet
- RFET Calibration Tube Standerds & Signal AnalysisDocument33 pagesRFET Calibration Tube Standerds & Signal AnalysisJeganJjNo ratings yet
- Back To Basics - Rubbing or Not?: Annular Rub. A Partial Rub Is The Most Common Manifestation of A RubDocument4 pagesBack To Basics - Rubbing or Not?: Annular Rub. A Partial Rub Is The Most Common Manifestation of A RubYoussef GhanemNo ratings yet
- UT Dallas Syllabus For Phys2422.001.11f Taught by Yuri Gartstein (Yxg037000)Document5 pagesUT Dallas Syllabus For Phys2422.001.11f Taught by Yuri Gartstein (Yxg037000)UT Dallas Provost's Technology GroupNo ratings yet
- Muneeza Zeb PresentationDocument12 pagesMuneeza Zeb PresentationShezaday Ki ShezadiNo ratings yet
- Hydraulics PDFDocument3 pagesHydraulics PDFAnil MarsaniNo ratings yet
- 150 CDocument12 pages150 Crobert carbungco100% (2)
- MRIPulse SequencesDocument55 pagesMRIPulse SequencesThạch Nguyễn TrọngNo ratings yet
- Imaging and Detectors For Medical Physics Lecture 4: RadionuclidesDocument57 pagesImaging and Detectors For Medical Physics Lecture 4: RadionuclidesAlexwgc ChNo ratings yet
- ELECTROSTATICSDocument21 pagesELECTROSTATICSHemanthNo ratings yet
- Eepw 2150 Module 1Document51 pagesEepw 2150 Module 13nathNo ratings yet
- Simple Machines TestDocument7 pagesSimple Machines TestAlyanna CrisologoNo ratings yet
- Conducting Polymer Nanocomposite BasedDocument58 pagesConducting Polymer Nanocomposite BasedMicu CristiNo ratings yet
- Kinetic Theory of GasesDocument9 pagesKinetic Theory of GasesNorhazli IbrahimNo ratings yet
- Fluke Type 73 Digital MultimeterDocument7 pagesFluke Type 73 Digital MultimeterAbiyot AderieNo ratings yet
- Electromagnetic TheoryDocument85 pagesElectromagnetic TheoryvamsiprasannakoduruNo ratings yet
- Electronic Structure, Vibrational Properties and Optical Spectra of 2D and 3D Hexagonal InSe: Layer-Dependent Ab Initio CalculationsDocument20 pagesElectronic Structure, Vibrational Properties and Optical Spectra of 2D and 3D Hexagonal InSe: Layer-Dependent Ab Initio CalculationsMuosa BejaniNo ratings yet
- Moment-Curvature Model For Steel Plate-Concrete CoDocument8 pagesMoment-Curvature Model For Steel Plate-Concrete CoTamir EnkhNo ratings yet
- Vectors, Spinors, and Complex Numbers in Classical and Quantum Physics David HestenesDocument23 pagesVectors, Spinors, and Complex Numbers in Classical and Quantum Physics David Hestenesosegeno654321100% (1)
- 4 - Anchor - Bolts - Base - Plate - DD1-2 - Module 201BDocument8 pages4 - Anchor - Bolts - Base - Plate - DD1-2 - Module 201Btitir bagchiNo ratings yet
- Course - Outline - PHY 163 - IPE L1T2Document4 pagesCourse - Outline - PHY 163 - IPE L1T2Atika AlamNo ratings yet
- Chapter-2 Motion in A Straight Line (PG 5 - 8)Document3 pagesChapter-2 Motion in A Straight Line (PG 5 - 8)darling deanNo ratings yet
- Jack Westin MCAT Content PhysicsDocument6 pagesJack Westin MCAT Content PhysicsLoraNo ratings yet
- Newtonian Mechanics 5Document2 pagesNewtonian Mechanics 5Nachiketa SarkarNo ratings yet
- 6 Power Generation From Piezoelectric Footstep Muhammad Aamir Vol 13 No 4Document7 pages6 Power Generation From Piezoelectric Footstep Muhammad Aamir Vol 13 No 4N MeghanaNo ratings yet
- Exp. 2 (Fluid Flow Measurement) : Sultan Qaboos University College of EngineeringDocument16 pagesExp. 2 (Fluid Flow Measurement) : Sultan Qaboos University College of Engineeringقاسمي عندامNo ratings yet
- Vectors Summary Sheet122211Document2 pagesVectors Summary Sheet122211pfredaacNo ratings yet
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument31 pagesPower Systems Protection Course: Al-Balqa Applied UniversityDiego Del CastilloNo ratings yet