You might also like
- Current Mode Controller: FeaturesDocument20 pagesCurrent Mode Controller: FeaturesJune SendaydiegoNo ratings yet
- MC 34017Document9 pagesMC 34017Eric Fabian GómezNo ratings yet
- AS3842Document14 pagesAS3842alex castroNo ratings yet
- NCP1396A, NCP1396B Controller, High Performance Resonant Mode, With High and Low Side DriversDocument26 pagesNCP1396A, NCP1396B Controller, High Performance Resonant Mode, With High and Low Side DriversMaria VaccarielloNo ratings yet
- 34063AP1 MotorolaDocument12 pages34063AP1 Motorolaochacino22No ratings yet
- DatasheetDocument9 pagesDatasheetjim campbellNo ratings yet
- Datasheet PDFDocument16 pagesDatasheet PDFSergio Daniel BarretoNo ratings yet
- Synchronous-Rectified Buck MOSFET Drivers: Features General DescriptionDocument5 pagesSynchronous-Rectified Buck MOSFET Drivers: Features General DescriptionTeles SilvaNo ratings yet
- Pulse Width Modulator Control Circuits: Semiconductor Technical DataDocument8 pagesPulse Width Modulator Control Circuits: Semiconductor Technical DataMaxNo ratings yet
- Uc3844 PDFDocument14 pagesUc3844 PDFAco ZekiriNo ratings yet
- Power Switching Regulators: Semiconductor Technical DataDocument16 pagesPower Switching Regulators: Semiconductor Technical DataAkramNo ratings yet
- AP384XG Data SheetDocument13 pagesAP384XG Data Sheetjoseluise68No ratings yet
- MC145190FDocument25 pagesMC145190FBảo BìnhNo ratings yet
- FAN7380 Half-Bridge Gate Driver: Features DescriptionDocument12 pagesFAN7380 Half-Bridge Gate Driver: Features Descriptionflo72afNo ratings yet
- D D D D D D D D D D D: Description/ordering InformationDocument16 pagesD D D D D D D D D D D: Description/ordering InformationJay rayNo ratings yet
- Advanced Voltage Mode Pulse Width Modulator: Description FeaturesDocument24 pagesAdvanced Voltage Mode Pulse Width Modulator: Description Featuresvanhuong87No ratings yet
- Uc3863 Utc U863 PDFDocument9 pagesUc3863 Utc U863 PDFShailesh VajaNo ratings yet
- Datasheet Ic 74hc165aDocument9 pagesDatasheet Ic 74hc165aNayla AzzahraNo ratings yet
- UCN5810 DatasheetDocument7 pagesUCN5810 DatasheetkarimNo ratings yet
- +VCCGT Vegas 15341Document8 pages+VCCGT Vegas 15341Eric ArcherNo ratings yet
- NCP1582, NCP1582A, NCP1583 Low Voltage Synchronous Buck ControllersDocument16 pagesNCP1582, NCP1582A, NCP1583 Low Voltage Synchronous Buck ControllersDaiverJuarezNo ratings yet
- Ucc28c40, Ucc28c41, Ucc28c42, Ucc28c43, Ucc28c44, Ucc28c45 Ucc38c40, Ucc38c41, Ucc38c42, Ucc38c43, Ucc38c44, Ucc38c45Document32 pagesUcc28c40, Ucc28c41, Ucc28c42, Ucc28c43, Ucc28c44, Ucc28c45 Ucc38c40, Ucc38c41, Ucc38c42, Ucc38c43, Ucc38c44, Ucc38c45curz0% (1)
- MC34063A, MC33063A DC-to-DC Converter Control Circuits: PDIP-8 P, P1 Suffix CASE 626Document16 pagesMC34063A, MC33063A DC-to-DC Converter Control Circuits: PDIP-8 P, P1 Suffix CASE 626alexjcc10No ratings yet
- Datasheet 1Document13 pagesDatasheet 1Abilio PaivaNo ratings yet
- TA8246AHDocument11 pagesTA8246AHronaldNo ratings yet
- Single Igbt High Current Gate Driver: Semiconductor Technical DataDocument13 pagesSingle Igbt High Current Gate Driver: Semiconductor Technical DataBojan ErcegNo ratings yet
- Linkswitch-Xt Family DatasheetDocument18 pagesLinkswitch-Xt Family DatasheetAscenten TechnologiesNo ratings yet
- Undervoltage Sensing Circuit: Semiconductor Technical DataDocument8 pagesUndervoltage Sensing Circuit: Semiconductor Technical DataFran Javi Vila DiazNo ratings yet
- Wireless Based Transformer Fault Location Analysis in Distribution SystemDocument25 pagesWireless Based Transformer Fault Location Analysis in Distribution SystemSrini VasanNo ratings yet
- Recommendation Drawing Upgrade Relay SEPAM2000 To SR745 (By Dimas)Document7 pagesRecommendation Drawing Upgrade Relay SEPAM2000 To SR745 (By Dimas)DanaNo ratings yet
- 1.5A Step-Down/Step-Up/Inverting DC-DC Converter Az34063UDocument14 pages1.5A Step-Down/Step-Up/Inverting DC-DC Converter Az34063UProducciones3NNo ratings yet
- 8 Bit Register 2Document16 pages8 Bit Register 2mughees ziaNo ratings yet
- Step-Down Converter Controller: Dirk Gehrke, Texas InstrumentsDocument2 pagesStep-Down Converter Controller: Dirk Gehrke, Texas InstrumentsJosé ManuelNo ratings yet
- 3A Bus Termination Regulator: Features DescriptionDocument14 pages3A Bus Termination Regulator: Features DescriptionZak zsNo ratings yet
- TA8246AHQ: Dual Audio Power Amplifier 6 W × 2 CHDocument11 pagesTA8246AHQ: Dual Audio Power Amplifier 6 W × 2 CHinggreg1No ratings yet
- Surge Stopping and Reverse Voltage Protection With The LM5069 PDFDocument7 pagesSurge Stopping and Reverse Voltage Protection With The LM5069 PDFĐỗ Văn ThủyNo ratings yet
- Micropower Undervoltage Sensing Circuits: Semiconductor Technical DataDocument9 pagesMicropower Undervoltage Sensing Circuits: Semiconductor Technical DataImadMehdiNo ratings yet
- MC34063A, MC33063A, SC34063A, SC33063A, NCV33063A Inverting Regulator - Buck, Boost, SwitchingDocument15 pagesMC34063A, MC33063A, SC34063A, SC33063A, NCV33063A Inverting Regulator - Buck, Boost, SwitchingSai BabaNo ratings yet
- ICL8038Document14 pagesICL8038RAYLINo ratings yet
- Ne555 Sa555 - Se555Document20 pagesNe555 Sa555 - Se555Wasantha MunasinghaNo ratings yet
- TLC 1514Document40 pagesTLC 1514Hoii ClarkNo ratings yet
- 17 Hpl2010-En PDFDocument180 pages17 Hpl2010-En PDFconsultachNo ratings yet
- Tle6250 v34 Can BusDocument28 pagesTle6250 v34 Can BusBer HonzaNo ratings yet
- SG3526Document11 pagesSG3526RocioLLactaMartinezNo ratings yet
- DS 2857FG 02 PDFDocument12 pagesDS 2857FG 02 PDFJohan GuanchezNo ratings yet
- Clap SwitchDocument1 pageClap SwitchSaravana_Kumar_4984No ratings yet
- FR9888 FR9886 RT8296A RT8282 Step Down DC DC Converter Buck Ic Nguon Gan Giong Act 4523 PDFDocument11 pagesFR9888 FR9886 RT8296A RT8282 Step Down DC DC Converter Buck Ic Nguon Gan Giong Act 4523 PDFdinh vinh nguyenNo ratings yet
- Texas - Instruments UC3846DW DatasheetDocument11 pagesTexas - Instruments UC3846DW Datasheetdidien7No ratings yet
- UC3844B, UC3845B, UC2844B, UC2845B High Performance Current Mode ControllersDocument20 pagesUC3844B, UC3845B, UC2844B, UC2845B High Performance Current Mode Controllers田忠勇No ratings yet
- TL2843B Q1 etcTIDocument18 pagesTL2843B Q1 etcTIrahma jayaNo ratings yet
- DatasheetDocument10 pagesDatasheetMiyer DíazNo ratings yet
- Synchronous-Rectified Buck MOSFET Drivers: Features General DescriptionDocument12 pagesSynchronous-Rectified Buck MOSFET Drivers: Features General DescriptionALANRAFAELTECNICONo ratings yet
- Tps 51116Document29 pagesTps 51116Ioan HtcNo ratings yet
- Precision Waveform Generator/Voltage Controlled Oscillator FeaturesDocument10 pagesPrecision Waveform Generator/Voltage Controlled Oscillator FeaturesqwertyuiNo ratings yet
- Samsung K15a 32196Document5 pagesSamsung K15a 32196LUIS CASTRONo ratings yet
- Green Mode Power Switch For Valley Switching Converter - Low EMI and High Efficiency FSQ0365, FSQ0265, FSQ0165, FSQ321Document22 pagesGreen Mode Power Switch For Valley Switching Converter - Low EMI and High Efficiency FSQ0365, FSQ0265, FSQ0165, FSQ321Mekkati MekkatiNo ratings yet
- UC3844B, UC3845B, UC2844B, UC2845B High Performance Current Mode ControllersDocument22 pagesUC3844B, UC3845B, UC2844B, UC2845B High Performance Current Mode ControllersCarlos Ortega MartinezNo ratings yet
- Stepper Motor Driver: Order This Document by SAA1042/DDocument7 pagesStepper Motor Driver: Order This Document by SAA1042/DGalo CárdenasNo ratings yet
- Power Off Reset Reason BackupDocument5 pagesPower Off Reset Reason BackupVictor HemzNo ratings yet
- Perm Debug InfoDocument12 pagesPerm Debug InfoVictor HemzNo ratings yet
- PM Debug InfoDocument249 pagesPM Debug InfoVictor HemzNo ratings yet
- Dark Mode Log1Document3 pagesDark Mode Log1Victor HemzNo ratings yet
- Shutdown Profile.5Document2 pagesShutdown Profile.5Evert Alexander TeruelNo ratings yet
- Shutdown Profile.5Document2 pagesShutdown Profile.5Evert Alexander TeruelNo ratings yet
- Perm LogDocument29 pagesPerm LogVictor HemzNo ratings yet
- Shutdown Profile.5Document2 pagesShutdown Profile.5Evert Alexander TeruelNo ratings yet
- Drop BoxDocument3 pagesDrop BoxVictor HemzNo ratings yet
- Lom LogDocument8 pagesLom LogVictor HemzNo ratings yet
- Shutdown MetricsDocument1 pageShutdown MetricsVictor HemzNo ratings yet
- 3 Phase IcDocument8 pages3 Phase IcMai AnhNo ratings yet
- Shutdown Profile.2Document1 pageShutdown Profile.2Cristina OpreaNo ratings yet
- D D D D D D D: MC3303, MC3403 Quadruple Low-Power Operational AmplifiersDocument13 pagesD D D D D D D: MC3303, MC3403 Quadruple Low-Power Operational AmplifiersVictor HemzNo ratings yet
- SF DumpDocument14 pagesSF DumpVictor HemzNo ratings yet
- LM324Document7 pagesLM324quocvttNo ratings yet
- DIO-48D-PE: Bi-Directional Digital I/O Board For PCI ExpressDocument3 pagesDIO-48D-PE: Bi-Directional Digital I/O Board For PCI ExpressVictor HemzNo ratings yet
- Dio 48D LpeDocument4 pagesDio 48D LpeVictor HemzNo ratings yet
- Dio 1616L PeDocument4 pagesDio 1616L PeVictor HemzNo ratings yet
- Closed Loop Brushless Motor Adapter: Semiconductor Technical DataDocument8 pagesClosed Loop Brushless Motor Adapter: Semiconductor Technical DataVictor HemzNo ratings yet
- Quad Differential Input Operational Amplifiers: Semiconductor Technical DataDocument8 pagesQuad Differential Input Operational Amplifiers: Semiconductor Technical DataVictor HemzNo ratings yet
- MC3303/MC3403: Quad Operational AmplifierDocument10 pagesMC3303/MC3403: Quad Operational AmplifierVictor HemzNo ratings yet
- DIO-96D-LPE: Bi-Directional Digital I/O Board For PCI Express Low ProfileDocument3 pagesDIO-96D-LPE: Bi-Directional Digital I/O Board For PCI Express Low ProfileVictor HemzNo ratings yet
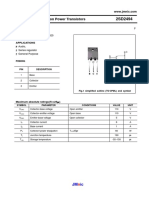
- Silicon NPN Darlington Power Transistors: DescriptionDocument3 pagesSilicon NPN Darlington Power Transistors: DescriptionDaniel Jesus LozanoNo ratings yet
- Silicon NPN Darlington Power Transistors: DescriptionDocument3 pagesSilicon NPN Darlington Power Transistors: DescriptionVictor HemzNo ratings yet
- Horizontal Deflection Output For High Resolution Display, Color TV High Speed Switching ApplicationsDocument5 pagesHorizontal Deflection Output For High Resolution Display, Color TV High Speed Switching ApplicationsVictor HemzNo ratings yet
- Dio 1616B PeDocument5 pagesDio 1616B PeVictor HemzNo ratings yet
- DIO-1616H-PE: Opto-Isolated Digital I/O For PCI Express 16 CH TypeDocument2 pagesDIO-1616H-PE: Opto-Isolated Digital I/O For PCI Express 16 CH TypeVictor HemzNo ratings yet
- D2499 DatasheetDocument5 pagesD2499 Datasheetjose peresNo ratings yet
- Low Carb Diabetic RecipesDocument43 pagesLow Carb Diabetic RecipesDayane Sant'AnnaNo ratings yet
- 12 Things You Must Know To Win A Full Scholarship in SwedenDocument51 pages12 Things You Must Know To Win A Full Scholarship in SwedenEmmanuel GeraldNo ratings yet
- Vanderbeck Solman ch01-10Document156 pagesVanderbeck Solman ch01-10Jelly AceNo ratings yet
- LECTURE 11-Microalgal Biotechnology-Biofuels N BioproductsDocument16 pagesLECTURE 11-Microalgal Biotechnology-Biofuels N BioproductsIntan Lestari DewiNo ratings yet
- Guide Book - Investing and Doing Business in HCMC VietnamDocument66 pagesGuide Book - Investing and Doing Business in HCMC VietnamemvaphoNo ratings yet
- 7diesel 2016Document118 pages7diesel 2016JoãoCarlosDaSilvaBrancoNo ratings yet
- Casio fx-82MSDocument49 pagesCasio fx-82MSPéter GedeNo ratings yet
- ADM2341 CH 8 Capstone QDocument2 pagesADM2341 CH 8 Capstone QjuiceNo ratings yet
- Architecture Design Planning Undergraduate Postgraduate Guide 2018Document52 pagesArchitecture Design Planning Undergraduate Postgraduate Guide 2018Jack LinNo ratings yet
- A Study On Flywheel Energy Recovery From Aircraft BrakesDocument5 pagesA Study On Flywheel Energy Recovery From Aircraft BrakesRaniero FalzonNo ratings yet
- 0x08. C - RecursionDocument13 pages0x08. C - RecursionElyousoufi hakim0% (1)
- Nipcib 000036Document273 pagesNipcib 000036AlfoFS0% (1)
- Health Tech Industry Accounting Guide 2023Document104 pagesHealth Tech Industry Accounting Guide 2023sabrinaNo ratings yet
- Wheel Loader Manual Agrison PDFDocument138 pagesWheel Loader Manual Agrison PDFTravisReign Dicang02No ratings yet
- Isbn 978-602-61467-0-0Document20 pagesIsbn 978-602-61467-0-0Sofhiya LbNo ratings yet
- Satyam GargDocument2 pagesSatyam GargSatyam GargNo ratings yet
- G1 - Introduction Generator ProtectionDocument21 pagesG1 - Introduction Generator ProtectionOoi Ban JuanNo ratings yet
- Request For Refund or Test Date Transfer FormDocument2 pagesRequest For Refund or Test Date Transfer FormAhmed Hamdy100% (1)
- Oil and Gas CompaniesDocument4 pagesOil and Gas CompaniesB.r. SridharReddy0% (1)
- FBS Ii enDocument10 pagesFBS Ii enunsalNo ratings yet
- Manual de Usuario PLECSIM 4.2Document756 pagesManual de Usuario PLECSIM 4.2juansNo ratings yet
- Summer Training Project (Completed)Document89 pagesSummer Training Project (Completed)yogeshjoshi362No ratings yet
- Peri Komponentu Katalogas Pastoliams 2015 enDocument372 pagesPeri Komponentu Katalogas Pastoliams 2015 enLim Yew KwangNo ratings yet
- Xanh Dương Và Trắng Đơn Giản Khởi Nghiệp Kinh Doanh Bản Thuyết Trình ĐộngDocument18 pagesXanh Dương Và Trắng Đơn Giản Khởi Nghiệp Kinh Doanh Bản Thuyết Trình Độngmai nguyễnNo ratings yet
- Application & Registration Form MSC International Business Management M2Document11 pagesApplication & Registration Form MSC International Business Management M2Way To Euro Mission Education ConsultancyNo ratings yet
- Consumer Behaviour-Kiran GDocument9 pagesConsumer Behaviour-Kiran GVaibhav KhandelwalNo ratings yet
- Project On Teaining DevelopmentDocument88 pagesProject On Teaining Developmentsurya annamdevulaNo ratings yet
- T3 Rapid Quantitative Test COA - F2311630AADDocument1 pageT3 Rapid Quantitative Test COA - F2311630AADg64bt8rqdwNo ratings yet
- Assignment 1technoDocument3 pagesAssignment 1technonadiyaxxNo ratings yet