You might also like
- Group Members - : Utkarsh Sharma Rahul Chauhan Sony Raghvendram Saumya Katiyar Shreya MahaurDocument31 pagesGroup Members - : Utkarsh Sharma Rahul Chauhan Sony Raghvendram Saumya Katiyar Shreya MahaurSNEHA SHARMANo ratings yet
- Project Solar Tracking SystemDocument29 pagesProject Solar Tracking SystemJacob B Chacko100% (1)
- Final Year Project ReportDocument77 pagesFinal Year Project ReportUsama Waheed0% (1)
- Chapter 5 - Pricing Forwards and Futures (S.V.)Document39 pagesChapter 5 - Pricing Forwards and Futures (S.V.)flippy23No ratings yet
- Smart Pesticide & Fertilizer Spraying RobotDocument6 pagesSmart Pesticide & Fertilizer Spraying RobotJiiva GopiNo ratings yet
- Coalmine Monitoring SystemDocument65 pagesCoalmine Monitoring SystemTechnos_IncNo ratings yet
- TM 10-7310-281-13&PDocument400 pagesTM 10-7310-281-13&P"Rufus"100% (1)
- Solar Tracking SystemDocument10 pagesSolar Tracking SystemRusiru SanjayaNo ratings yet
- Credo: Integrity Management SoftwareDocument12 pagesCredo: Integrity Management SoftwareSaqib AliNo ratings yet
- Sand Slinger MC Pneumatic 2016 VeltechDocument47 pagesSand Slinger MC Pneumatic 2016 VeltechChockalingam AthilingamNo ratings yet
- Hybrid Power Full Seminar ReportDocument106 pagesHybrid Power Full Seminar ReportD Avi Na Sh100% (1)
- Power Generation Using Speed Breakers and Efficient Use of Energy Created by It.Document57 pagesPower Generation Using Speed Breakers and Efficient Use of Energy Created by It.Vaibhav KhareNo ratings yet
- Alcohol Detecting and Notification System For Controlling Drink and Driving PDFDocument6 pagesAlcohol Detecting and Notification System For Controlling Drink and Driving PDFHepisipa Matekitonga100% (1)
- Fault Detection in Transmission Line Using GSM Technology 4301,4304,4313Document67 pagesFault Detection in Transmission Line Using GSM Technology 4301,4304,4313naveen gNo ratings yet
- Electric Cycle Project ReportDocument68 pagesElectric Cycle Project ReportARJUN S KNo ratings yet
- Arduino Based Home Automation System Using Bluetooth Through An Android Mobile PDFDocument72 pagesArduino Based Home Automation System Using Bluetooth Through An Android Mobile PDFsalmanNo ratings yet
- "Regenerative Braking System": A Major Project Report ONDocument35 pages"Regenerative Braking System": A Major Project Report ONPushpendra KumarNo ratings yet
- Fabrication of Multipurpose 4 in 1 Agriculture Robotic VehicleDocument33 pagesFabrication of Multipurpose 4 in 1 Agriculture Robotic Vehicleakshay gopal100% (1)
- Ultrasonic Automatic BrakingDocument46 pagesUltrasonic Automatic BrakingChandan Kumar SharmaNo ratings yet
- Automatic Solar TrackerDocument30 pagesAutomatic Solar Trackersachin tyagiNo ratings yet
- Hybrid Vehicle ReportDocument64 pagesHybrid Vehicle ReportDeepSharanNo ratings yet
- Smart Phone Operated Multipurpose Agricultural Robot Report M.karthick KumarDocument62 pagesSmart Phone Operated Multipurpose Agricultural Robot Report M.karthick KumarKavipriyaNo ratings yet
- SM 11Document245 pagesSM 11Paulo Gomes de Souza50% (2)
- CFL Changer Project ReportDocument25 pagesCFL Changer Project ReportTanviNo ratings yet
- Iot Based Autonomous Floor Cleaning Robot: A Projrct Report OnDocument47 pagesIot Based Autonomous Floor Cleaning Robot: A Projrct Report Onhamed razaNo ratings yet
- Project Report - Docx 11111Document46 pagesProject Report - Docx 11111Narayan SutharNo ratings yet
- Automatic Side Stand SystemDocument25 pagesAutomatic Side Stand SystemAravindh Kumar33% (3)
- Wireless Power TheftDocument13 pagesWireless Power TheftManjeet JunejaNo ratings yet
- Project Synopsis On: Sensor Based Automatic Irrigation SystemDocument11 pagesProject Synopsis On: Sensor Based Automatic Irrigation SystemAjay Kumar SinghNo ratings yet
- Automation in AgricultureDocument41 pagesAutomation in AgricultureAbhijit SalunkheNo ratings yet
- GSM Based Fire Fighting RobotDocument35 pagesGSM Based Fire Fighting RobotRaushanVijaySingh100% (1)
- Solar Mobile Charger: Name: Nikhil Pandita Roll No. TIN33 Name: Mrunal Patil Roll No. TIN22Document18 pagesSolar Mobile Charger: Name: Nikhil Pandita Roll No. TIN33 Name: Mrunal Patil Roll No. TIN22Samir NandardhaneNo ratings yet
- An IoT Based School Zone Vehicle Monitoring System With Automatic Vehicle Speed Control and Alert SystemDocument17 pagesAn IoT Based School Zone Vehicle Monitoring System With Automatic Vehicle Speed Control and Alert SystemM NAVYANo ratings yet
- Auto IrrigationDocument41 pagesAuto Irrigationnitish kumarNo ratings yet
- Smart Child Borewell System 3Document44 pagesSmart Child Borewell System 3Venkat nagulapatiNo ratings yet
- Aqua Drone Ieee PaperDocument3 pagesAqua Drone Ieee PaperAkash ShahuNo ratings yet
- Smart Phone Controlled Induction Motor Using Android Application inDocument45 pagesSmart Phone Controlled Induction Motor Using Android Application inGopinathManoharanNo ratings yet
- Modification of River Cleaning MachineDocument5 pagesModification of River Cleaning MachineIJRASETPublicationsNo ratings yet
- Report - Smart Irrigation SystemDocument32 pagesReport - Smart Irrigation SystemKani mozhiNo ratings yet
- Laser Security SystemDocument13 pagesLaser Security SystemArpitRanka67% (12)
- Final Project Report Foot Step (With Out Footer)Document47 pagesFinal Project Report Foot Step (With Out Footer)Deepak Raj R100% (3)
- CoalminecanDocument91 pagesCoalminecanVenkanna BadavathNo ratings yet
- Solar Powdered Autonomous VehicleDocument40 pagesSolar Powdered Autonomous VehicleChinmaye PurushothamNo ratings yet
- Seminar Deep LearningDocument17 pagesSeminar Deep LearningSulagna Roy ChowdhuryNo ratings yet
- Report On Brain Tumor - Docx1Document35 pagesReport On Brain Tumor - Docx1Monika DebnathNo ratings yet
- E-Bomb Seminar ReportDocument44 pagesE-Bomb Seminar Reportneha.aadi3236100% (1)
- Synopsis Pesticide Sprayer MinorDocument11 pagesSynopsis Pesticide Sprayer MinorDEBDYUTI BISWAS100% (1)
- New Iot Fire Alarm SystemDocument39 pagesNew Iot Fire Alarm SystemNarayananNanuNo ratings yet
- Powered Vegetable Cutting Machine RDocument36 pagesPowered Vegetable Cutting Machine RMubarak ShaikNo ratings yet
- Railway Track Security System Report PDFDocument26 pagesRailway Track Security System Report PDFeshu50% (2)
- Final Year Project Report: Micro RefrigeratorDocument40 pagesFinal Year Project Report: Micro RefrigeratorWaseem Aulakh100% (1)
- A Project Report On Mobile Charger UsingDocument36 pagesA Project Report On Mobile Charger UsingRavi Kumar100% (3)
- Noor Dzulaikha Daud MFKE2014Document24 pagesNoor Dzulaikha Daud MFKE2014Arav SinghNo ratings yet
- Traffic Light Sensor Using Arduino BoardDocument24 pagesTraffic Light Sensor Using Arduino BoardArunkumarNo ratings yet
- 1.drowsy Driver Detection and AlertsDocument76 pages1.drowsy Driver Detection and AlertsPolyster100% (1)
- LPG Leakage DetectorDocument51 pagesLPG Leakage DetectorSyed ArefinNo ratings yet
- Coin Based Water Controlling SystemDocument34 pagesCoin Based Water Controlling SystemSanthosh Guduru75% (4)
- REPORT (Automatic Sreet Light Controlling Based On Vehicle Movement)Document20 pagesREPORT (Automatic Sreet Light Controlling Based On Vehicle Movement)Arbab AslamNo ratings yet
- Solar Bicycle PDFDocument24 pagesSolar Bicycle PDFshyam murariNo ratings yet
- Fabrication of Solar Air CoolerDocument32 pagesFabrication of Solar Air CoolerLikhi LikhiteshNo ratings yet
- Automatic Car Window Opening System by Using Oxygen and Sound SensorDocument4 pagesAutomatic Car Window Opening System by Using Oxygen and Sound SensorEditor IJTSRDNo ratings yet
- Project Covid 19Document24 pagesProject Covid 19Bilal BhatNo ratings yet
- Report Sugarcane LifterDocument44 pagesReport Sugarcane LifterAbhinandan Patil71% (7)
- Institute of Engineering & Science Ips Academy Indore: Major Project ReportDocument33 pagesInstitute of Engineering & Science Ips Academy Indore: Major Project Reportshruti20_mittalNo ratings yet
- Mobile Charger Based On Solar Energy With Solar Tracking SystemDocument6 pagesMobile Charger Based On Solar Energy With Solar Tracking SystemKarthik RamarathinamNo ratings yet
- Grade 9 JARIS Chapter # 1: SECTION 2 Accuracy and PrecisionDocument23 pagesGrade 9 JARIS Chapter # 1: SECTION 2 Accuracy and PrecisionzeyadNo ratings yet
- VIDocument4 pagesVIkmbkrisNo ratings yet
- Is Iso 105 A05 1996Document12 pagesIs Iso 105 A05 1996tramy1413No ratings yet
- Ono Si Sto JedesDocument5 pagesOno Si Sto JedesMirjana KefecekNo ratings yet
- James K Peckol Embedded Systems A Contemporary Design Tool PDFDocument3 pagesJames K Peckol Embedded Systems A Contemporary Design Tool PDFvaishak Ar0% (3)
- Buildings Department Practice Note For Authorized Persons and Registered Structural Engineers 79Document6 pagesBuildings Department Practice Note For Authorized Persons and Registered Structural Engineers 79Kwok MorrisNo ratings yet
- TajDocument27 pagesTajAshish SinghNo ratings yet
- Carboxylic Acids and Acid Derivatives Carbonyl PDFDocument124 pagesCarboxylic Acids and Acid Derivatives Carbonyl PDFrvignesh2809No ratings yet
- Ssssss Ssssssssss Sssssssssss Ssss Sssssssss Ss Sss Ssss Sssss.Document20 pagesSsssss Ssssssssss Sssssssssss Ssss Sssssssss Ss Sss Ssss Sssss.Hemant SonawadekarNo ratings yet
- Innovative Teaching Manual: Submitted byDocument7 pagesInnovative Teaching Manual: Submitted byPrasant NatarajanNo ratings yet
- s12517 020 5241 ZDocument17 pagess12517 020 5241 ZMemar AliNo ratings yet
- Willard GuideDocument46 pagesWillard GuideBronwynne OctoberNo ratings yet
- The Plant Journal - 2023 - Selma Garc A - Engineering The Plant Metabolic System by Exploiting Metabolic RegulationDocument28 pagesThe Plant Journal - 2023 - Selma Garc A - Engineering The Plant Metabolic System by Exploiting Metabolic RegulationRodrigo ParolaNo ratings yet
- CVA Case StudyDocument9 pagesCVA Case Studypylzanne100% (1)
- Lemuel Ticman Clarif Meeting No. 1Document3 pagesLemuel Ticman Clarif Meeting No. 1Vholts Villa VitugNo ratings yet
- My First Inspiration By: Jose RizalDocument5 pagesMy First Inspiration By: Jose RizalMavic Jaictin Bagondol SemaNo ratings yet
- The Geology of The Country Around Cork and Cork HarbourDocument161 pagesThe Geology of The Country Around Cork and Cork HarbourBLPgalwayNo ratings yet
- DALIDocument162 pagesDALIalboshfayezNo ratings yet
- Unit 6 - 7 - 9 - 10 Eng12Document42 pagesUnit 6 - 7 - 9 - 10 Eng12L. HanaNo ratings yet
- 2nd Quarter TLE ICT 7 - Chapter 7Document11 pages2nd Quarter TLE ICT 7 - Chapter 7Raymond PunoNo ratings yet
- Antenna QuizDocument12 pagesAntenna Quizvs_prabhu88No ratings yet
- PPT: ASEAN & SAARC Regional Rice Trade: Status & Opportunities For Ensuring Food SecurityDocument36 pagesPPT: ASEAN & SAARC Regional Rice Trade: Status & Opportunities For Ensuring Food SecurityASEAN Rice Trade ForumNo ratings yet
- HD74LS02: Quadruple 2-Input Positive NOR GatesDocument6 pagesHD74LS02: Quadruple 2-Input Positive NOR GatesLuis AntonioNo ratings yet
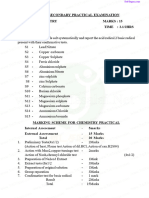
- 11th Chemistry Practical Question Paper English MediumDocument1 page11th Chemistry Practical Question Paper English Mediumayanas2626No ratings yet
- Biological Molecule (Nucleid Acids) ObjDocument5 pagesBiological Molecule (Nucleid Acids) ObjYing ShuangNo ratings yet