You might also like
- Advanced Diagnosis of Electrical FaultsDocument13 pagesAdvanced Diagnosis of Electrical Faultsfares noureddineNo ratings yet
- Detecting Broken Rotor Bars With Zero-Setting ProtectionDocument12 pagesDetecting Broken Rotor Bars With Zero-Setting ProtectionBredy LaraNo ratings yet
- Ya Zidi 2005Document7 pagesYa Zidi 2005Nathan RodriguesNo ratings yet
- Paper 8 - Additional Losses - Damper Winding - Hydrogenerators at Open-Circuit and Load Conditions - Traxler-SamekDocument7 pagesPaper 8 - Additional Losses - Damper Winding - Hydrogenerators at Open-Circuit and Load Conditions - Traxler-SamekNicolás NielsenNo ratings yet
- Detection of Rotor Winding Shorted TurnsDocument12 pagesDetection of Rotor Winding Shorted TurnsGheorghe BogdanNo ratings yet
- Rotor 6Document6 pagesRotor 6kais alviNo ratings yet
- Detecting Turn Insulation Failures in Motor Coils Using Ground Current SignalsDocument4 pagesDetecting Turn Insulation Failures in Motor Coils Using Ground Current SignalsMozar CostaNo ratings yet
- Anti-Interference and Location Performance For Turn-to-Turn Short Circuit Detection in Turbo-Generator Rotor WindingsDocument18 pagesAnti-Interference and Location Performance For Turn-to-Turn Short Circuit Detection in Turbo-Generator Rotor WindingsJorge VallejosNo ratings yet
- RSO & Coil MeasurementsDocument13 pagesRSO & Coil MeasurementsintoisrNo ratings yet
- Winding Distribution Effects On Inductio PDFDocument9 pagesWinding Distribution Effects On Inductio PDFfares noureddineNo ratings yet
- Analysis of Voltage Unbalance Effects On Induction Motors With Open and Closed SlotsDocument7 pagesAnalysis of Voltage Unbalance Effects On Induction Motors With Open and Closed SlotsBredy LaraNo ratings yet
- A Frequency Domain Detection of Stator WDocument8 pagesA Frequency Domain Detection of Stator Wfares noureddineNo ratings yet
- Detection and Location of Stator Winding Interturn Fault at Different Slots of DFIGDocument12 pagesDetection and Location of Stator Winding Interturn Fault at Different Slots of DFIGWagdy KhaterNo ratings yet
- An Objective Study of Behavior of Permanent Magnet Synchronous Motor Under Abnormal ConditionsDocument8 pagesAn Objective Study of Behavior of Permanent Magnet Synchronous Motor Under Abnormal ConditionsRey RoosterNo ratings yet
- 03 - Thomson Et Al - Current Signature Analysis To Detect Induction Motors FaultsDocument9 pages03 - Thomson Et Al - Current Signature Analysis To Detect Induction Motors FaultsCar AljaNo ratings yet
- A Review of Condition Monitoring of Induction Motors Based On Stray FluxDocument7 pagesA Review of Condition Monitoring of Induction Motors Based On Stray FluxRenergy NusantaraNo ratings yet
- Inter-Turn Fault Analysis of Synchronous Generator Using Finite Element Method (FEM)Document7 pagesInter-Turn Fault Analysis of Synchronous Generator Using Finite Element Method (FEM)RohitNo ratings yet
- 9470 English TarjomeFaDocument10 pages9470 English TarjomeFatusarNo ratings yet
- Induction Machine ModelDocument9 pagesInduction Machine ModelHernanda BudizNo ratings yet
- Falhas Prematuras em Rolamentos - Causas - Romero Araújo (2015)Document7 pagesFalhas Prematuras em Rolamentos - Causas - Romero Araújo (2015)AndréNo ratings yet
- Advances in Motor and Generator Rotor HealthDocument4 pagesAdvances in Motor and Generator Rotor HealthJessica SandersNo ratings yet
- Electric Power Systems ResearchDocument11 pagesElectric Power Systems Researchmarut1999No ratings yet
- Equivalent Broadband Electrical Circuit of Synchronous Machine Winding For Frequency Response Analysis Based On Gray Box ModelDocument10 pagesEquivalent Broadband Electrical Circuit of Synchronous Machine Winding For Frequency Response Analysis Based On Gray Box ModelrodineicarraroNo ratings yet
- Fundamentals of Fault Current and Grounding in Electrical SystemsFrom EverandFundamentals of Fault Current and Grounding in Electrical SystemsRating: 4 out of 5 stars4/5 (3)
- Continuous Automated Flux Monitoring For Turbine Generator Rotor Condition Assessment - Epri 2004 PDFDocument15 pagesContinuous Automated Flux Monitoring For Turbine Generator Rotor Condition Assessment - Epri 2004 PDFabdul2wajidNo ratings yet
- Analysis of Turbine Generator Rotor Winding Shorted TurnsDocument8 pagesAnalysis of Turbine Generator Rotor Winding Shorted Turns세진박No ratings yet
- Remedial For Faults Synchronous: ControllerDocument1 pageRemedial For Faults Synchronous: ControllerOmar Chayña VelásquezNo ratings yet
- Generator Field Winding Shorted Turns - Observed Conditions and CausesDocument11 pagesGenerator Field Winding Shorted Turns - Observed Conditions and CausesJoeDabid100% (1)
- Demagnetization of Modular Surface Mounted Permanent Magnet MachinesDocument7 pagesDemagnetization of Modular Surface Mounted Permanent Magnet MachinesMartin FurlanNo ratings yet
- Performance Analysis of Wound Rotor Induction Motor Subjected To Rotor Windings AsymmetryDocument6 pagesPerformance Analysis of Wound Rotor Induction Motor Subjected To Rotor Windings AsymmetryDiego RamosNo ratings yet
- Unit Iv - Apparatus Protection: December 2023Document71 pagesUnit Iv - Apparatus Protection: December 2023sapnarauthanNo ratings yet
- Health Index Monitoring Assessment of A TransformerDocument6 pagesHealth Index Monitoring Assessment of A TransformerOmkar WaghNo ratings yet
- La in Service AnalysisDocument6 pagesLa in Service AnalysisSunil LimayeNo ratings yet
- Analysis and Simulation of Inter-Turn Fault of Synchronous Generator Using MATLABDocument7 pagesAnalysis and Simulation of Inter-Turn Fault of Synchronous Generator Using MATLABIJRASETPublicationsNo ratings yet
- Protection of MotorsDocument7 pagesProtection of MotorsSudrshan B BarveNo ratings yet
- Energies 11 02524Document15 pagesEnergies 11 02524Pimolwan PikitklangNo ratings yet
- CTRequirementsDocument16 pagesCTRequirementsYannisOlasNo ratings yet
- Iemdc 1999 769189Document3 pagesIemdc 1999 769189hamidrezaNo ratings yet
- Rotor Rso Reflectometer TYPE TDR100 and TDR100RBDocument38 pagesRotor Rso Reflectometer TYPE TDR100 and TDR100RBDevas ShuklaNo ratings yet
- Generator Field Winding Shorted Turns: Observed Conditions and CausesDocument11 pagesGenerator Field Winding Shorted Turns: Observed Conditions and CausesFritz Hasugian100% (1)
- Protection of Ac Generators and Motors: Generator FaultsDocument10 pagesProtection of Ac Generators and Motors: Generator FaultsasdasasdsdfsdfNo ratings yet
- Stator Circulating Currents As Media of Fault Detection in Synchronous MotorsDocument8 pagesStator Circulating Currents As Media of Fault Detection in Synchronous MotorsAdil ShahidNo ratings yet
- Online Cage Rotor Fault DetectionDocument6 pagesOnline Cage Rotor Fault DetectionPedro OdorizziNo ratings yet
- A Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesDocument11 pagesA Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesTarak BenslimaneNo ratings yet
- Stator-Interturn-Fault Detection of Doubly Fed Induction Generators Using Rotor-Current and Search-Coil-Voltage Signature AnalysisDocument12 pagesStator-Interturn-Fault Detection of Doubly Fed Induction Generators Using Rotor-Current and Search-Coil-Voltage Signature AnalysisSaad ChakkorNo ratings yet
- A Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous MachinesDocument3 pagesA Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous Machinesafru2000No ratings yet
- EE6504EMII2018Document192 pagesEE6504EMII2018SOUGATA MAJINo ratings yet
- Iv 2014Document12 pagesIv 2014Chandan YadavNo ratings yet
- Rotor Shorted Turns - Detection and DiagnosticsDocument10 pagesRotor Shorted Turns - Detection and Diagnosticswaqas mahmoodNo ratings yet
- Sridhar 2013Document6 pagesSridhar 2013Bobby RinaldiNo ratings yet
- Understanding Shaft Voltage and Grounding Currents of Turbine GeneratorsDocument12 pagesUnderstanding Shaft Voltage and Grounding Currents of Turbine GeneratorsJose PradoNo ratings yet
- Power FormerDocument5 pagesPower FormerJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- 19 PDFsam Partcondition Monitoring of Rotating Electrical MachinDocument6 pages19 PDFsam Partcondition Monitoring of Rotating Electrical MachinShah PriyeshNo ratings yet
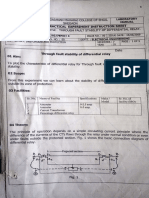
- PSP Practical No 3,5,7Document11 pagesPSP Practical No 3,5,7Vivek BendeNo ratings yet
- Cigre, 13 Years Test Experience With Short Circuit Withstand Capability of Large Power TransformersDocument7 pagesCigre, 13 Years Test Experience With Short Circuit Withstand Capability of Large Power TransformersMartin ButcherNo ratings yet
- Rotor Fault Diagnosis Using External Search Coils Voltage AnalysisDocument5 pagesRotor Fault Diagnosis Using External Search Coils Voltage AnalysisAhcene BouzidaNo ratings yet
- 418 DallasDocument6 pages418 DallasbaradaranhamidNo ratings yet
- Various Types of Faults and Their Detect PDFDocument10 pagesVarious Types of Faults and Their Detect PDFfares noureddineNo ratings yet
- Bearing Insulation ResistanceDocument10 pagesBearing Insulation Resistancemurty0077754No ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Datasheet Hitachi Content Software For FileDocument4 pagesDatasheet Hitachi Content Software For FileHung Do MinhNo ratings yet
- Submission Peer-Graded AssignmentDocument1 pageSubmission Peer-Graded AssignmentFrancis Drake0% (1)
- List of Horticultural Research Station (Tnau) in The High Altitude and Hilly ZoneDocument112 pagesList of Horticultural Research Station (Tnau) in The High Altitude and Hilly Zoneprabha5050No ratings yet
- Brexit - Unravelling The Ties That Bind The Past, Present, and FutureDocument26 pagesBrexit - Unravelling The Ties That Bind The Past, Present, and FutureShoaib A. MalikNo ratings yet
- Airline Cabin Crew ETextbook 3rded-2017 TALG-51Document455 pagesAirline Cabin Crew ETextbook 3rded-2017 TALG-51Abdul Nasar100% (9)
- Roles Responsibilities A Handbook For CGST OfficersDocument64 pagesRoles Responsibilities A Handbook For CGST OfficersHr legaladviserNo ratings yet
- TV LG LCD 32LG30 UD Chassis LA85DDocument35 pagesTV LG LCD 32LG30 UD Chassis LA85DIvan Leonardo Acevedo GalanNo ratings yet
- Asas Kebersihan Makanan KKMDocument6 pagesAsas Kebersihan Makanan KKMMario RushdeeNo ratings yet
- Internship ReportDocument54 pagesInternship ReportAparnaNo ratings yet
- Q4 HOPE 2 - Module 5Document10 pagesQ4 HOPE 2 - Module 5May Ann GodezanoNo ratings yet
- Development Strategies of The Bahari Jawai Marine Tourism Coast Area Based On Community Empowerment in Sambas RegencyDocument10 pagesDevelopment Strategies of The Bahari Jawai Marine Tourism Coast Area Based On Community Empowerment in Sambas Regencyberagam09No ratings yet
- Wipro Offer LetterDocument14 pagesWipro Offer Lettertapan kumar singhaNo ratings yet
- CLX6260FD Service ManualDocument159 pagesCLX6260FD Service ManualAndres Lopez ArandaNo ratings yet
- 01-2Document29 pages01-2HamzaKadNo ratings yet
- 5ec2ea4d-d369-4454-96c6-8dd4705af487Document3 pages5ec2ea4d-d369-4454-96c6-8dd4705af487Apple servicesNo ratings yet
- Definition of A BeamDocument8 pagesDefinition of A BeamAngelo Lirio InsigneNo ratings yet
- CHF Impact Assessment Somali RegionDocument58 pagesCHF Impact Assessment Somali RegionYousuf INo ratings yet
- About SamsoniteDocument4 pagesAbout Samsonitepriyanksingh1986No ratings yet
- Las - Ict 7 - Special Programs - Q4 - Week 5&6Document16 pagesLas - Ict 7 - Special Programs - Q4 - Week 5&6George Mar Bien AriolaNo ratings yet
- DPI - Jul-Aug 16Document59 pagesDPI - Jul-Aug 16ratninp9368No ratings yet
- Mike O'Hearn's Power Bodybuilding 12-Week Training ProgramDocument7 pagesMike O'Hearn's Power Bodybuilding 12-Week Training ProgramRay0% (1)
- Direct Shear Test ResultDocument7 pagesDirect Shear Test ResultDeepak Kr GuptaNo ratings yet
- How To Setup Haproxy As Load Balancer For Nginx On Centos 7: Basic Concept With HaproxyDocument7 pagesHow To Setup Haproxy As Load Balancer For Nginx On Centos 7: Basic Concept With HaproxyJoselyn Apaza FernándezNo ratings yet
- Case Study: Vodafone EgyptDocument2 pagesCase Study: Vodafone EgyptIslam Ayman Mashaly50% (2)
- Doc. No. - Page No. - Book No. - Series of 2014Document2 pagesDoc. No. - Page No. - Book No. - Series of 2014mgllacunaNo ratings yet
- Introduction of KUT650 Ultrasonic Flaw Detector - HongTuoDocument3 pagesIntroduction of KUT650 Ultrasonic Flaw Detector - HongTuolovaldes62No ratings yet
- G.R. No. 193138, August 20, 2018 Aniceto G. Saludo, JR., Petitioner, V. Philippine National BANK, Respondent. Decision Jardeleza, J.Document12 pagesG.R. No. 193138, August 20, 2018 Aniceto G. Saludo, JR., Petitioner, V. Philippine National BANK, Respondent. Decision Jardeleza, J.Gellian eve OngNo ratings yet
- Commander SK Industrial Overview BrochureDocument8 pagesCommander SK Industrial Overview BrochureSteinþór Bjarni GrímssonNo ratings yet
- Trial9 Ora 17055 Inform Answer Close Query - TRCDocument76 pagesTrial9 Ora 17055 Inform Answer Close Query - TRCManoj MohapatraNo ratings yet
- Deed of Road Right of WayDocument6 pagesDeed of Road Right of WayPlaridel Madrigal75% (4)