You might also like
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Arduino & RPiDocument33 pagesArduino & RPiiemct23No ratings yet
- lecture22_Arduino_CSE 1Document46 pageslecture22_Arduino_CSE 1Yatharth YatharthNo ratings yet
- ArduinoDocument34 pagesArduinoLukeNo ratings yet
- Internet of Things Technology 15CS81Document44 pagesInternet of Things Technology 15CS81ArunNo ratings yet
- Arduino "Getting Started" Tutorial: HardwareDocument7 pagesArduino "Getting Started" Tutorial: Hardwareranas837No ratings yet
- Intro To ArduinoDocument38 pagesIntro To ArduinoANTONIO MIGUEL DAYNONo ratings yet
- Embedded Systems Lecture 5 Board Based Embedded SystemDocument79 pagesEmbedded Systems Lecture 5 Board Based Embedded SystemElihu GetachewNo ratings yet
- Ec509 U3.3Document32 pagesEc509 U3.3Pranav PrNo ratings yet
- (Arduino) Pranav Computer Branch - BDocument14 pages(Arduino) Pranav Computer Branch - BVIPER VALORANTNo ratings yet
- IOE - Lab ManualDocument63 pagesIOE - Lab ManualHarsha LuckyNo ratings yet
- Arduino CSEDocument71 pagesArduino CSEMayank ThakurNo ratings yet
- Arduino UnoDocument5 pagesArduino UnoSiva ViratNo ratings yet
- IOT PracticalsDocument28 pagesIOT PracticalsmuskanbandariaNo ratings yet
- Arduino Meeting & Exam ScheduleDocument54 pagesArduino Meeting & Exam ScheduleNashucha MNo ratings yet
- IOT ARduino PDFDocument84 pagesIOT ARduino PDFKuppan Chetty RamanathanNo ratings yet
- IOT Module 5 PDFDocument41 pagesIOT Module 5 PDFAnisha 19CS008No ratings yet
- Introduction To Arduino Programming: Jinasena Innovation & Technology Institute - EkalaDocument60 pagesIntroduction To Arduino Programming: Jinasena Innovation & Technology Institute - EkalaSanuji KalhanNo ratings yet
- Arduino 1Document150 pagesArduino 1natashathania06No ratings yet
- Arduino "Getting StartedDocument7 pagesArduino "Getting StartedMax dos santos ramosNo ratings yet
- EMBEDDED SYSTEM LAB TRAINER Instruction ManualDocument27 pagesEMBEDDED SYSTEM LAB TRAINER Instruction ManualyogeshNo ratings yet
- Arduino Poster High-ResolutionDocument1 pageArduino Poster High-ResolutionSteve KirkmanNo ratings yet
- 15cs81 Iott Module 5-Updates-1Document49 pages15cs81 Iott Module 5-Updates-1Ayman AbubakerNo ratings yet
- Lab 2 - Introduction To Arduino & Its CodingDocument7 pagesLab 2 - Introduction To Arduino & Its CodingSaif UllahNo ratings yet
- 15CS81 IoT Module 5Document49 pages15CS81 IoT Module 5sjdksd sdsf100% (1)
- Arduino Boards NotesDocument73 pagesArduino Boards Noteskangirene9705No ratings yet
- Arduino and Raspberry Pi IntroductionDocument42 pagesArduino and Raspberry Pi IntroductionVTU ML WorkshopNo ratings yet
- Internet of Things (Iot)Document54 pagesInternet of Things (Iot)nitinsomanathanNo ratings yet
- Arduino Introduction PDFDocument94 pagesArduino Introduction PDFTariq AngelNo ratings yet
- Introduction To Arduino and IdeDocument15 pagesIntroduction To Arduino and IdeDhanashree ThoratNo ratings yet
- MIKRO1 - Teori MK MikrokontrollerDocument109 pagesMIKRO1 - Teori MK MikrokontrollerRelay PK 12No ratings yet
- All About Arduino BoardsDocument7 pagesAll About Arduino BoardsMallikarjun RaoNo ratings yet
- AN Introductio Ntothe Arduino: Name: R.R.R.B.P.W.S.S.Palihawadan A Reg. No: 413338900Document13 pagesAN Introductio Ntothe Arduino: Name: R.R.R.B.P.W.S.S.Palihawadan A Reg. No: 413338900geetha kanthiNo ratings yet
- Introduction To An Arduino - Arduino Basics - Arduino OverviewDocument25 pagesIntroduction To An Arduino - Arduino Basics - Arduino OverviewSrikanth Pinisetti100% (1)
- Arduino NotesDocument27 pagesArduino NotesJames JosephNo ratings yet
- Lab #1Document8 pagesLab #1HALIMANo ratings yet
- Arduino Development BoardDocument14 pagesArduino Development BoardAnonymous WkbmWCa8M100% (1)
- Arduino Programming For ESD: by MD - Dedarul HasanDocument38 pagesArduino Programming For ESD: by MD - Dedarul HasandedarulNo ratings yet
- Final Year DjangoDocument11 pagesFinal Year DjangoKaustubh SawantNo ratings yet
- iot module 2 materialDocument36 pagesiot module 2 materialteswart2002No ratings yet
- Arduino Lab Manual Explains Board Setup and ProgrammingDocument5 pagesArduino Lab Manual Explains Board Setup and ProgrammingRasheed ShahNo ratings yet
- Arduino Heat Sensing with LM35 SensorDocument12 pagesArduino Heat Sensing with LM35 SensorSamridhi JNo ratings yet
- IOT Exp-1Document8 pagesIOT Exp-1Download PurposeNo ratings yet
- Arduino Quick Guide123Document51 pagesArduino Quick Guide123Madhav ReddyNo ratings yet
- Embedded Systems ICT211aDocument63 pagesEmbedded Systems ICT211aAmy CainoyNo ratings yet
- Arduino: Introduction To BmeDocument11 pagesArduino: Introduction To BmeYoussef MohamedNo ratings yet
- Arduino Home Automation PDFDocument20 pagesArduino Home Automation PDFSilviu SoareNo ratings yet
- Introduction To ArduinoDocument60 pagesIntroduction To ArduinoDenard JongNo ratings yet
- Curs 3 Prezentare Arduino - IDE - ExempleDocument91 pagesCurs 3 Prezentare Arduino - IDE - ExemplePCNo ratings yet
- UntitledDocument57 pagesUntitledhordofa sufiyanNo ratings yet
- By M.Santhosh Kumar M.E Embedded Developer Spiro Solutions PVT LTDDocument18 pagesBy M.Santhosh Kumar M.E Embedded Developer Spiro Solutions PVT LTDAravindNo ratings yet
- Arduino IDE and Programming ToolsDocument88 pagesArduino IDE and Programming ToolsDaniel PopescuNo ratings yet
- Arduino BootcampDocument47 pagesArduino Bootcampvinod varmaNo ratings yet
- Arduino Part 1: Topics: Microcontrollers Programming Basics: Structure and Variables Digital OutputDocument192 pagesArduino Part 1: Topics: Microcontrollers Programming Basics: Structure and Variables Digital OutputJenica NavarroNo ratings yet
- IOT Using Arduino IDE to Monitor Temperature and HumidityDocument20 pagesIOT Using Arduino IDE to Monitor Temperature and HumidityPrabir dasNo ratings yet
- ArduinoDocument8 pagesArduinosrc e-solutionsNo ratings yet
- WorskShop Lab 5Document22 pagesWorskShop Lab 5manavlund5No ratings yet
- Iot Lab ManualDocument48 pagesIot Lab ManualVishnu SaiNo ratings yet
- Technogyan: - ArduinoDocument10 pagesTechnogyan: - ArduinoDhanraj BhosaleNo ratings yet
- Bahan Modul PraktikumDocument210 pagesBahan Modul PraktikumMain PBNo ratings yet
- CH 1Document15 pagesCH 1migadNo ratings yet
- Running Time - GraphDocument3 pagesRunning Time - GraphmigadNo ratings yet
- Manage Student Records Easily with a DatabaseDocument1 pageManage Student Records Easily with a DatabasemigadNo ratings yet
- Project of ApparentDocument19 pagesProject of ApparentmigadNo ratings yet
- AbstractDocument1 pageAbstractmigadNo ratings yet
- Vlsi Design SlidesDocument77 pagesVlsi Design SlidesmigadNo ratings yet
- CPU Scheduling: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument55 pagesCPU Scheduling: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionNebiyu TakeleNo ratings yet
- Student-Record Report - Dagim Cherinet Tech-0482-10Document14 pagesStudent-Record Report - Dagim Cherinet Tech-0482-10migadNo ratings yet
- Routing and STP AssignmentDocument6 pagesRouting and STP AssignmentmigadNo ratings yet
- Getch Internship ReportDocument25 pagesGetch Internship ReportmigadNo ratings yet
- VLSI Presentation1Document187 pagesVLSI Presentation1migadNo ratings yet
- VLSI LectureDocument4 pagesVLSI LecturemigadNo ratings yet
- Vlsi Design SlidesDocument77 pagesVlsi Design SlidesmigadNo ratings yet
- ECE 4110 - Sequential Logic Design Lecture #15: AgendaDocument7 pagesECE 4110 - Sequential Logic Design Lecture #15: AgendaBala SubramanianNo ratings yet
- CH 01 Nature & Scope of Indust MNGT 1Document59 pagesCH 01 Nature & Scope of Indust MNGT 1migadNo ratings yet
- Chap 2 FORECASTINGDocument57 pagesChap 2 FORECASTINGmigadNo ratings yet
- Project ReportDocument6 pagesProject ReportmigadNo ratings yet
- Hawassa University Student Clearance Management SystemDocument22 pagesHawassa University Student Clearance Management Systemmigad50% (2)
- Data Link Control and Multiple AccessDocument42 pagesData Link Control and Multiple AccessmigadNo ratings yet
- Switching and Routing: Samson A School of Electrical & Computer Engineering, Hawassa Institute of TechnologyDocument47 pagesSwitching and Routing: Samson A School of Electrical & Computer Engineering, Hawassa Institute of TechnologymigadNo ratings yet
- Computernetworking LAB REPORTDocument7 pagesComputernetworking LAB REPORTmigadNo ratings yet
- Samplequestions: Chapter Two & ThreeDocument15 pagesSamplequestions: Chapter Two & ThreemigadNo ratings yet
- 2.1 How I Get Into The Company: Executive SummaryDocument1 page2.1 How I Get Into The Company: Executive SummarymigadNo ratings yet
- LAN Design for OrganizationDocument2 pagesLAN Design for OrganizationmigadNo ratings yet
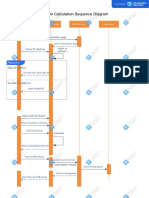
- VLSM Calculation Sequence Diagram: Request The Calculator PageDocument1 pageVLSM Calculation Sequence Diagram: Request The Calculator PagemigadNo ratings yet
- Report - Hawassa UniversityDocument62 pagesReport - Hawassa Universitymigad100% (3)
- Hawassa University Institute of Technology Department of Electrical and Computer Engineering, Computer Stream Internship ReportDocument27 pagesHawassa University Institute of Technology Department of Electrical and Computer Engineering, Computer Stream Internship ReportmigadNo ratings yet
- Hawassa University Institute of Technology Department of Electrical and Computer Engineering Computer Stream Internship ProjectDocument20 pagesHawassa University Institute of Technology Department of Electrical and Computer Engineering Computer Stream Internship ProjectmigadNo ratings yet
- Spatial Descriptions and Transformations: Chapter TwoDocument25 pagesSpatial Descriptions and Transformations: Chapter TwomigadNo ratings yet
- Hawassa University Institute of Technology Department of Electrical and Computer Engineering Computer StreamDocument4 pagesHawassa University Institute of Technology Department of Electrical and Computer Engineering Computer StreammigadNo ratings yet
- Eye Controlled Wheelchair Based On Arduino Circuit: Reona Cerejo, Valentine Correia, Neil PereiraDocument5 pagesEye Controlled Wheelchair Based On Arduino Circuit: Reona Cerejo, Valentine Correia, Neil PereiratahaseenNo ratings yet
- Mini CNC Plotter using Spare PartsDocument5 pagesMini CNC Plotter using Spare PartsAli Mustafa AllafiNo ratings yet
- Finolex Academy of Management and TechnologyDocument35 pagesFinolex Academy of Management and TechnologyRenuka SawantNo ratings yet
- Smart Traffic Control System Based On Vehicle DensityDocument55 pagesSmart Traffic Control System Based On Vehicle DensityRajan SinghNo ratings yet
- 4164 5995 1 PBDocument7 pages4164 5995 1 PBmohamed rizwanNo ratings yet
- Arduino-Based Automatic Sliding Door DesignDocument8 pagesArduino-Based Automatic Sliding Door DesignNizar Noer InsanNo ratings yet
- STM32 With HC-05 Bluetooth Module Using Devices ControlDocument13 pagesSTM32 With HC-05 Bluetooth Module Using Devices ControlKamal HasanNo ratings yet
- R2R Digital Analog Converter DAC PDFDocument7 pagesR2R Digital Analog Converter DAC PDFAdriel De MoraesNo ratings yet
- Lecture 1Document26 pagesLecture 1HarshSinghNo ratings yet
- Mahesh.V Resume SPACEGRAPHDocument4 pagesMahesh.V Resume SPACEGRAPHMAHESH VNo ratings yet
- RB15 LowDocument44 pagesRB15 Lowhigherdepths100% (2)
- Developing a Modular IoT PlatformDocument6 pagesDeveloping a Modular IoT PlatformRaghu RamNo ratings yet
- PSWD Based Door Lock System 2Document25 pagesPSWD Based Door Lock System 2Lucky KotreshNo ratings yet
- Diploma Eee ProjectsDocument25 pagesDiploma Eee ProjectsrajasekarNo ratings yet
- Reporton Gas Leakage Detection SensorDocument13 pagesReporton Gas Leakage Detection SensorSambram A BNo ratings yet
- Smart Car Parking System 7 Segment DisplayDocument15 pagesSmart Car Parking System 7 Segment DisplayNihal Al RafiNo ratings yet
- D53 Mar Lab 5Document9 pagesD53 Mar Lab 5Prajwal AtramNo ratings yet
- Arduino Hardware Guide: Stepper Motors, LCD Displays & MoreDocument10 pagesArduino Hardware Guide: Stepper Motors, LCD Displays & MoreRakesh ChaurasiaNo ratings yet
- UGCIJSRSETArduino Based Radar Systemfor Short Range ApplicationsDocument11 pagesUGCIJSRSETArduino Based Radar Systemfor Short Range ApplicationsasillllllllllllllllllllllllllllllllllNo ratings yet
- Obstacle Avoiding Robot Lab Project ReportDocument27 pagesObstacle Avoiding Robot Lab Project Reportyaswanth yashuNo ratings yet
- 2019Document19 pages2019Mapalakane MatsepaneNo ratings yet
- Resume - Jonathan Ye 26Document2 pagesResume - Jonathan Ye 26api-576590803No ratings yet
- Color Sensor Line Follower Robot Obstacle DetectionDocument16 pagesColor Sensor Line Follower Robot Obstacle DetectionpaishkepengNo ratings yet
- Adafruit Max31856 Thermocouple AmplifierDocument22 pagesAdafruit Max31856 Thermocouple AmplifierViet NguyenHoangNo ratings yet
- Embedded Systems Assignment 3Document6 pagesEmbedded Systems Assignment 3ramrevolt55No ratings yet
- Four-Legged Walking Robot: A Comprehensive Report On The QuadrupedDocument10 pagesFour-Legged Walking Robot: A Comprehensive Report On The QuadrupedArnav SharmaNo ratings yet
- Underground Cable Fault Distance Locator (Draft)Document25 pagesUnderground Cable Fault Distance Locator (Draft)B100% (2)
- H-Bridge Motor Driver Hardware ManualDocument6 pagesH-Bridge Motor Driver Hardware ManualSiony BelloNo ratings yet
- CPE 014 Activity 5 1 PDFDocument9 pagesCPE 014 Activity 5 1 PDFshi unlockNo ratings yet
- Grove-GSR Sensor WiKi PDFDocument4 pagesGrove-GSR Sensor WiKi PDFHugo VargasNo ratings yet