You might also like
- Ferroelectric and Piezoelectric MaterialsDocument37 pagesFerroelectric and Piezoelectric Materialszaahir_salam1No ratings yet
- DSE 7320 Training PDFDocument32 pagesDSE 7320 Training PDFIbrahim Mostafa100% (1)
- Class 9-Electricity and MagnetismDocument16 pagesClass 9-Electricity and MagnetismspsarathyNo ratings yet
- MX-6070V, MX-5050N, MX-5070N, MX-6050N, MX-6070N Service ManualDocument457 pagesMX-6070V, MX-5050N, MX-5070N, MX-6050N, MX-6070N Service Manualkenny2021No ratings yet
- Magnetostrictive TransducersDocument17 pagesMagnetostrictive TransducersPrathamesh BhutraNo ratings yet
- Piezoelectric Materials & ApplicationsDocument12 pagesPiezoelectric Materials & ApplicationsakramNo ratings yet
- To Study The Moving Coil GalvanometerDocument14 pagesTo Study The Moving Coil GalvanometerLohitthaNo ratings yet
- Piezoelectric CrystalDocument9 pagesPiezoelectric CrystalFasihah Arshad100% (1)
- DWDM & Otn TrainingDocument60 pagesDWDM & Otn Trainingmanu100% (1)
- Ecs V10il1 37GV10000 C0 Rev C PDFDocument32 pagesEcs V10il1 37GV10000 C0 Rev C PDFSigit SandjajaNo ratings yet
- 2 - Pizeo Electric SensorDocument33 pages2 - Pizeo Electric SensorNesamaniNo ratings yet
- Ultrasonic and Piezo Electric TransducersDocument33 pagesUltrasonic and Piezo Electric TransducersPraneshNo ratings yet
- Eddy PiezoDocument19 pagesEddy Piezoshrish ukhalkarNo ratings yet
- CH 8 Piezoelectrin Pyroelectric and Ferroelectric MaterialsDocument22 pagesCH 8 Piezoelectrin Pyroelectric and Ferroelectric MaterialsRabin YadavNo ratings yet
- Piezoelectric Quartz CrystalDocument4 pagesPiezoelectric Quartz CrystalPaper Mario FanNo ratings yet
- TransducerDocument12 pagesTransducerYashiro IsanaNo ratings yet
- Piezoelectric Quartz Crystal: TransducerDocument5 pagesPiezoelectric Quartz Crystal: Transducervigneshwarimahamuni100% (1)
- Resumen de Piezo Ceramic TutorialsDocument29 pagesResumen de Piezo Ceramic TutorialsCarlos BustamanteNo ratings yet
- Piezo Ceramic TutorialsDocument51 pagesPiezo Ceramic TutorialsCarlos BustamanteNo ratings yet
- Taught By: Daniel Opoku (PH.D.) : 288 (Electrical) Measurement & InstrumentationDocument34 pagesTaught By: Daniel Opoku (PH.D.) : 288 (Electrical) Measurement & InstrumentationPhamous TayNo ratings yet
- PHY.554: Advanced Solid State PhysicsDocument41 pagesPHY.554: Advanced Solid State Physicsaayush tomarNo ratings yet
- Measurement of Displacement:: Theory and ConstructionDocument45 pagesMeasurement of Displacement:: Theory and ConstructionZekarias tenawNo ratings yet
- Piezo Ceramic TutorialsDocument50 pagesPiezo Ceramic Tutorialscal2_uniNo ratings yet
- Chapter 2 and 3: by HenokDocument52 pagesChapter 2 and 3: by Henokenok henaNo ratings yet
- EE17401-M&I Piezoelectric Transducer, Hall Effect TransducerDocument18 pagesEE17401-M&I Piezoelectric Transducer, Hall Effect TransduceravsNo ratings yet
- Piezoelectrictransducer 141128011014 Conversion Gate01 PDFDocument60 pagesPiezoelectrictransducer 141128011014 Conversion Gate01 PDFRamakrishna SagarNo ratings yet
- Hyam Nazmy Badr Khalaf: Physics Department - Faculty of Science - Minia UniversityDocument42 pagesHyam Nazmy Badr Khalaf: Physics Department - Faculty of Science - Minia UniversityEbram AtifNo ratings yet
- PDO Course 4Document97 pagesPDO Course 41MM1R HL'No ratings yet
- Electrical Resonance and Signal Filtering: 1 AbstractDocument18 pagesElectrical Resonance and Signal Filtering: 1 Abstractcrimson mistNo ratings yet
- Piezoelectric EffectDocument12 pagesPiezoelectric EffectkarenNo ratings yet
- UltrasonicsDocument39 pagesUltrasonicsanilm130484meNo ratings yet
- Physic 4.1 Cathode Ray OscilloscopeDocument25 pagesPhysic 4.1 Cathode Ray OscilloscopeSascha WuNo ratings yet
- Electricity Magnetism and ElectromagnetismDocument51 pagesElectricity Magnetism and ElectromagnetismJun OrbitaNo ratings yet
- Emi 13 TransducerDocument44 pagesEmi 13 TransducerhasibNo ratings yet
- Piezoelectric CeramicsDocument12 pagesPiezoelectric CeramicsLin JieNo ratings yet
- Piezoelectricity: Medical Physics Notes: UltrasoundDocument10 pagesPiezoelectricity: Medical Physics Notes: UltrasounddjoumblatNo ratings yet
- Optoelectronics: Wave Nature of LightDocument41 pagesOptoelectronics: Wave Nature of LightEbenezer AkpariboNo ratings yet
- UltrasonicsDocument40 pagesUltrasonics20. Ashish Mahajan 12th 'B'No ratings yet
- CIE A2 Physics Paper 4 Notes V2Document26 pagesCIE A2 Physics Paper 4 Notes V2saad100% (1)
- AssignmentDocument5 pagesAssignmentAbdul HannanNo ratings yet
- To Estimate The Charge Induced On Each of The Two Identical Styro Foam (Or Pith) Balls Suspended in A Vertical Plane by Making Use of Coulomb's LawDocument21 pagesTo Estimate The Charge Induced On Each of The Two Identical Styro Foam (Or Pith) Balls Suspended in A Vertical Plane by Making Use of Coulomb's Lawgamingwithwolves38No ratings yet
- CRO (Cathode Ray Oscilloscope)Document126 pagesCRO (Cathode Ray Oscilloscope)Bhavika jainNo ratings yet
- Piezoelectric MaterialsDocument31 pagesPiezoelectric MaterialsBhavya TanneruNo ratings yet
- Sensors Part2Document15 pagesSensors Part2Usman AliNo ratings yet
- Polarization and Wave Plates: ObjectivesDocument20 pagesPolarization and Wave Plates: ObjectivesPAULO CESAR CARHUANCHO VERANo ratings yet
- Novel Acoustic Wave Sensing Device Using Living CellsDocument3 pagesNovel Acoustic Wave Sensing Device Using Living CellsShilpa ChadarNo ratings yet
- Ultrasonics Part 1Document6 pagesUltrasonics Part 1yashwantNo ratings yet
- Electron Spin Resonance (ESR)Document9 pagesElectron Spin Resonance (ESR)Rounak AtramNo ratings yet
- Piezo Mechanical StressesDocument9 pagesPiezo Mechanical Stressessurendranath jadhavNo ratings yet
- Lecture 5 - 2022Document89 pagesLecture 5 - 2022Francis LubangoNo ratings yet
- Mag ElectromagDocument38 pagesMag ElectromagJames Paul Micael GargantaNo ratings yet
- Life Without ElectroscopesDocument3 pagesLife Without ElectroscopesKanishka SeneviratneNo ratings yet
- 2 7 1-ElectricityDocument3 pages2 7 1-ElectricityChin Hui JinNo ratings yet
- Chapter 2Document72 pagesChapter 2AhmedNo ratings yet
- A Project On Pizeoelectric Crystal Based InverterDocument66 pagesA Project On Pizeoelectric Crystal Based InverterThakur Vivek SinghNo ratings yet
- Piezo Electric TransducerDocument13 pagesPiezo Electric TransducerMUKESH SUNDARARAJANNo ratings yet
- Different Instruments - 2018Document99 pagesDifferent Instruments - 2018kaneeshaNo ratings yet
- Basic Electronics AssignmentDocument8 pagesBasic Electronics AssignmentGokulNo ratings yet
- Science 10-Lesson 10Document34 pagesScience 10-Lesson 10afloresNo ratings yet
- Scanning Tunneling Microscope (STM)Document25 pagesScanning Tunneling Microscope (STM)Shreyans ShethNo ratings yet
- Moving Coil GalvanometerDocument5 pagesMoving Coil GalvanometerAshok PradhanNo ratings yet
- Introduction To USWDocument21 pagesIntroduction To USWTitus Samuel SudandararajNo ratings yet
- Lectu Ra 1 Ferro Electric MaterialsDocument23 pagesLectu Ra 1 Ferro Electric MaterialsLola Centeno CentenoNo ratings yet
- Class Notes On Non Verbal CommunicationDocument2 pagesClass Notes On Non Verbal CommunicationDeepak MotwaniNo ratings yet
- Helping in Understanding The Problem Define The: CwhatDocument4 pagesHelping in Understanding The Problem Define The: CwhatDeepak MotwaniNo ratings yet
- Class Notes On Flow of CommunicationDocument2 pagesClass Notes On Flow of CommunicationDeepak MotwaniNo ratings yet
- Class Notes On Barriers To CommunicationDocument4 pagesClass Notes On Barriers To CommunicationDeepak MotwaniNo ratings yet
- Chap 6Document23 pagesChap 6studentgprec2653No ratings yet
- Activity 1.3.1 Solar Hydrogen System - VexDocument7 pagesActivity 1.3.1 Solar Hydrogen System - Vexapi-291536844No ratings yet
- Grid Code Impact On Generating Stations A Generator Owner and Operator's PerspectiveDocument7 pagesGrid Code Impact On Generating Stations A Generator Owner and Operator's PerspectiveAmbachew A.No ratings yet
- Semester - I I Year B.E. / B.Tech. Ge 2115 Computer Practice Laboratory - I Requirements For A Batch of 30 StudentsDocument24 pagesSemester - I I Year B.E. / B.Tech. Ge 2115 Computer Practice Laboratory - I Requirements For A Batch of 30 StudentsRithika M NagendiranNo ratings yet
- RF Current - Injection Clamp Type EM 101 Electromagnetic Glamp, System Swiss PTTDocument27 pagesRF Current - Injection Clamp Type EM 101 Electromagnetic Glamp, System Swiss PTTFerhat CoşkunNo ratings yet
- Chapter 7 Directional OcDocument10 pagesChapter 7 Directional OcTana AzeezNo ratings yet
- 400 Gms Welder ManualDocument47 pages400 Gms Welder ManualArthur BreedNo ratings yet
- The Fatal CurrentDocument2 pagesThe Fatal CurrentSherif MahmoudNo ratings yet
- Instruction Format and Addressing ModesDocument30 pagesInstruction Format and Addressing Modesmadhurimapatra1987100% (6)
- SEMICONDUCTOR THEORY Questions and Answers PDF:-: A. Covalent B. Electrovalent C. Co-Ordinate D. None of The AboveDocument5 pagesSEMICONDUCTOR THEORY Questions and Answers PDF:-: A. Covalent B. Electrovalent C. Co-Ordinate D. None of The AboveAbhishek KushwahaNo ratings yet
- Manual de Operacion e Instalacion Tarjeta WoodwardDocument32 pagesManual de Operacion e Instalacion Tarjeta WoodwardXavyer Gomez100% (2)
- TtiDocument7 pagesTtivaish20No ratings yet
- TPS7A4700EVM-094 Evaluation Module: User's GuideDocument14 pagesTPS7A4700EVM-094 Evaluation Module: User's GuideJaroslav BiresNo ratings yet
- Servo User Manual LITE en PDFDocument76 pagesServo User Manual LITE en PDFleon3388No ratings yet
- Irig Pro IO User ManualDocument14 pagesIrig Pro IO User ManualAnyelo Rojas CórdovaNo ratings yet
- Addendums To M&E SOR 2013Document16 pagesAddendums To M&E SOR 2013Sonu VishwakarmaNo ratings yet
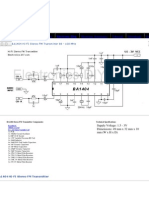
- Ba 1404Document9 pagesBa 1404Tesfaye WoldemeskelNo ratings yet
- Kacific 1.2m Ka Band Terminal Installation Manual v2 6 WebDocument32 pagesKacific 1.2m Ka Band Terminal Installation Manual v2 6 WebRogie Lumagsao100% (1)
- ACRD6XXP SchematicDocument2 pagesACRD6XXP SchematicMasab AnisNo ratings yet
- I/O Specifications: CPU Unit DescriptionsDocument10 pagesI/O Specifications: CPU Unit Descriptionsวรพงษ์ กอชัชวาลNo ratings yet
- SRT 1F Technical DescriptionDocument64 pagesSRT 1F Technical DescriptionEze Alexander IkNo ratings yet
- Sklansky AdderDocument6 pagesSklansky AdderSaiDhoolamNo ratings yet
- TVRDocument28 pagesTVRAnonymous 2uGo65hytNo ratings yet
- TF June2022Document16 pagesTF June2022Ansh SinghNo ratings yet
- Pulse and Digital CircuitsDocument2 pagesPulse and Digital CircuitsGautam ReddyNo ratings yet
- Digigram - MPX Over IP Networks, Product SheetDocument2 pagesDigigram - MPX Over IP Networks, Product Sheetjohn BronsonNo ratings yet