You might also like
- 4613 ReportDocument35 pages4613 ReportRUNLIN MA100% (1)
- Chapter 1 Introduction To Engineering Principles and UnitsDocument47 pagesChapter 1 Introduction To Engineering Principles and Unitseng_yap_1No ratings yet
- Gyroscope Couple and Precession Motion ExperimentDocument11 pagesGyroscope Couple and Precession Motion ExperimentronaldoNo ratings yet
- 19 Induction Motor Fundamentals PDFDocument37 pages19 Induction Motor Fundamentals PDFsuchita jainNo ratings yet
- UTF-8'en'QRadar SIEM and ZscalerDocument20 pagesUTF-8'en'QRadar SIEM and ZscalerDens Can't Be PerfectNo ratings yet
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsDocument13 pagesThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimNo ratings yet
- 3 Phase Induction Motor ReportDocument5 pages3 Phase Induction Motor ReportOPIYO ONYANGO100% (3)
- Induction Motor Drive Control MethodsDocument8 pagesInduction Motor Drive Control MethodsRudra Kumar MishraNo ratings yet
- EE743 Induction Machines Torque-Speed CharacteristicsDocument22 pagesEE743 Induction Machines Torque-Speed CharacteristicsGogioman Myhay100% (1)
- Corona Characteristics ThilinaDocument6 pagesCorona Characteristics ThilinaThilina Jayaweera100% (2)
- Transfer Function of A PMDC MotorDocument6 pagesTransfer Function of A PMDC MotorKenneth TanNo ratings yet
- ECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersDocument60 pagesECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersKelvin LiewNo ratings yet
- Induction Machines: Steady State Torque Speed CharacteristicDocument9 pagesInduction Machines: Steady State Torque Speed CharacteristicRyan Benjamin100% (1)
- Dynamics LAB Report 2Document11 pagesDynamics LAB Report 2Bhargav PurimetlaNo ratings yet
- Automatic Staters: DC Motor StarterDocument6 pagesAutomatic Staters: DC Motor StarterSusmita DasNo ratings yet
- Induction Generator Operation and ApplicationsDocument4 pagesInduction Generator Operation and ApplicationsAaryanNo ratings yet
- Experiments EMS IIDocument117 pagesExperiments EMS IIOsama Tahir100% (1)
- Pneumatic Control SystemsDocument4 pagesPneumatic Control SystemsSupun AmarasingheNo ratings yet
- Unit 2 Electromagnetic Relays (Switchgear and Protection)Document91 pagesUnit 2 Electromagnetic Relays (Switchgear and Protection)sujithNo ratings yet
- No Load and Blocked Rotor Tests On Single Phase Induction MotorDocument5 pagesNo Load and Blocked Rotor Tests On Single Phase Induction MotorDhivya NNo ratings yet
- Typical Rod Gap ArresterDocument11 pagesTypical Rod Gap ArresterMuhammad Asif Iqbal100% (1)
- Efficiency Improvements in High Speed Operation Using Slotless Configuration For PMSMDocument7 pagesEfficiency Improvements in High Speed Operation Using Slotless Configuration For PMSMAmit ShuklaNo ratings yet
- Basic-Engineering - Electrical EngineeringDocument227 pagesBasic-Engineering - Electrical EngineeringE-m FunaNo ratings yet
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Speeed ControlDocument3 pagesSpeeed ControlChristine GomezNo ratings yet
- Electromagnetic Torque Analysis of A DFIG For WindDocument10 pagesElectromagnetic Torque Analysis of A DFIG For WindK.T.No ratings yet
- Electromagnetic Relay Static Relay Numerical Relay: Single Input Comparator Dual Input Comparator Multi Input ComparatorDocument34 pagesElectromagnetic Relay Static Relay Numerical Relay: Single Input Comparator Dual Input Comparator Multi Input ComparatorSathiyarajNo ratings yet
- Assignment - I 26 04 2020Document2 pagesAssignment - I 26 04 2020JackNo ratings yet
- Position SelsynDocument2 pagesPosition SelsynPrashil RandiveNo ratings yet
- NDW Series Computer Controlled Torsion Testing MachineDocument5 pagesNDW Series Computer Controlled Torsion Testing Machinegosaye desalegnNo ratings yet
- Electrical Engineering QUESTION BANKDocument7 pagesElectrical Engineering QUESTION BANKMATHANKUMAR.S100% (1)
- (ACTA Universitatis Cibiniensis) Testing The Performance of A Single-Phase Autotransformer On MATLABSimulinkDocument6 pages(ACTA Universitatis Cibiniensis) Testing The Performance of A Single-Phase Autotransformer On MATLABSimulinkbeimanalfredoNo ratings yet
- Asynchronous Machines Tutorial Sheets (EL-208Document10 pagesAsynchronous Machines Tutorial Sheets (EL-208Kushagra BhatiaNo ratings yet
- (Single+Three) Phase Induction Motors Interview Questions SetDocument18 pages(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeNo ratings yet
- Determination of The Equivalent Circuit Parameters of A Transformer and Calculation of Efficiency and Regulation Using Equivalent CircuitDocument4 pagesDetermination of The Equivalent Circuit Parameters of A Transformer and Calculation of Efficiency and Regulation Using Equivalent CircuitMd Rion100% (1)
- Indian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringDocument4 pagesIndian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringKool PrashantNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Determining Equivalent Circuit Parameters of Single-Phase Induction MotorsDocument6 pagesDetermining Equivalent Circuit Parameters of Single-Phase Induction MotorsReeta DuttaNo ratings yet
- Synchronous Machine ChapterDocument27 pagesSynchronous Machine ChapternaaventhenNo ratings yet
- 22 PDFDocument25 pages22 PDFgavin kennedyNo ratings yet
- RC and RL CircuitsDocument17 pagesRC and RL CircuitsManjot KaurNo ratings yet
- Fly-Ball Governor: ReferenceDocument1 pageFly-Ball Governor: Referencenadya novarizkaNo ratings yet
- Tut - PsocDocument2 pagesTut - Psocfews100% (1)
- Special - Electrical - Machines QBDocument25 pagesSpecial - Electrical - Machines QBVel MuruganNo ratings yet
- Squirrel Cage and Wound RotorDocument4 pagesSquirrel Cage and Wound RotorACouh CHi JOshNo ratings yet
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument37 pagesPower Systems Protection Course: Al-Balqa Applied UniversityLimuel Espiritu100% (1)
- AC Series MotorsDocument8 pagesAC Series Motorsゞ『HaiDerツ98〆No ratings yet
- Chapter 9 SensorsDocument48 pagesChapter 9 Sensorsامجد الغالبيNo ratings yet
- Experiment No. 5 Overcurrent and Undercurrent Relay: ObjectiveDocument4 pagesExperiment No. 5 Overcurrent and Undercurrent Relay: ObjectiveMian Tauseef100% (1)
- Synchronous Generator Transient AnalysisDocument15 pagesSynchronous Generator Transient AnalysisRoshan AkaravitaNo ratings yet
- RLC LaplaceDocument4 pagesRLC LaplaceharimadhavareddyNo ratings yet
- Ssemd PPT1Document205 pagesSsemd PPT1control 4uonlyNo ratings yet
- Internship KsebDocument97 pagesInternship KsebVishnu VijayaramanNo ratings yet
- Chapter 1 DC Drives Part1Document46 pagesChapter 1 DC Drives Part1Mohammad MunzirNo ratings yet
- DC MachinesDocument52 pagesDC MachinesArun Kumar100% (1)
- NoncompleteDocument8 pagesNoncompleteعمر تاليونNo ratings yet
- Induction (Asynchronous) Machines 1.1Document9 pagesInduction (Asynchronous) Machines 1.1Areej AdeebNo ratings yet
- Chapter 7-Induction Motors Part1 PDFDocument18 pagesChapter 7-Induction Motors Part1 PDFMohammadrezaÖztürkNo ratings yet
- Induction Motor: Chapter # 01Document22 pagesInduction Motor: Chapter # 01smartengrzNo ratings yet
- Three-Phase Induction Motor Components & OperationDocument51 pagesThree-Phase Induction Motor Components & OperationANUSHA RAJNo ratings yet
- Assignment OMDocument15 pagesAssignment OMLaaria ChrisNo ratings yet
- The Effect of Teamwork On Productivity in Sales and Marketing Departments: A Case Study of Nairobi Bottlers LimitedDocument76 pagesThe Effect of Teamwork On Productivity in Sales and Marketing Departments: A Case Study of Nairobi Bottlers LimitedLaaria ChrisNo ratings yet
- CAT 2 ECE SchemeDocument2 pagesCAT 2 ECE SchemeLaaria ChrisNo ratings yet
- Electrical Machines PDFDocument44 pagesElectrical Machines PDFLaaria ChrisNo ratings yet
- Eee2306 Group 4 Three Phase TransformersDocument11 pagesEee2306 Group 4 Three Phase TransformersLaaria ChrisNo ratings yet
- HELB Loan Application FormDocument8 pagesHELB Loan Application FormLaaria ChrisNo ratings yet
- Eee 2306 Group 4 1 Phase Induction MotorDocument12 pagesEee 2306 Group 4 1 Phase Induction MotorLaaria ChrisNo ratings yet
- EEE Dept Timetable Sept 2019 - Feb 2020Document28 pagesEEE Dept Timetable Sept 2019 - Feb 2020Laaria ChrisNo ratings yet
- 1 Lecture One and Two Notes - Doc - 0Document10 pages1 Lecture One and Two Notes - Doc - 0Laaria ChrisNo ratings yet
- Nice OneDocument1 pageNice OneLaaria ChrisNo ratings yet
- 1 Lecture One and Two Notes - Doc - 0.odtDocument10 pages1 Lecture One and Two Notes - Doc - 0.odtLaaria ChrisNo ratings yet
- Workshop Practice 1Document17 pagesWorkshop Practice 1Laaria ChrisNo ratings yet
- Oxidation and ReductionDocument19 pagesOxidation and ReductionLaaria ChrisNo ratings yet
- FCI 08-ProductBrochureDocument16 pagesFCI 08-ProductBrochurepardan aksaniNo ratings yet
- ETO YES Training ManualDocument37 pagesETO YES Training ManualA NineNo ratings yet
- 19-0431 Rev 2 8/01Document12 pages19-0431 Rev 2 8/01mubs73No ratings yet
- WF-500 DatasheetDocument2 pagesWF-500 DatasheetNhat Tan MaiNo ratings yet
- SAP Business Planning and Consolidation and Consolidation: Inese Jargane 30.10.2008Document23 pagesSAP Business Planning and Consolidation and Consolidation: Inese Jargane 30.10.2008shah744No ratings yet
- Od-Ops-Syst-003 Procedure For Testing and Maintenance To Avoid Excessiveover Speeding of Prime MoversDocument1 pageOd-Ops-Syst-003 Procedure For Testing and Maintenance To Avoid Excessiveover Speeding of Prime MoversDeepak KansalNo ratings yet
- Urban Guide - DocumentationDocument125 pagesUrban Guide - Documentationanjali singhNo ratings yet
- ProModel User GuideDocument717 pagesProModel User Guidejleirbag92No ratings yet
- Linear video editing process under 40 charsDocument13 pagesLinear video editing process under 40 charsLight CloudNo ratings yet
- Huawei Concentric Cell OptimizationDocument45 pagesHuawei Concentric Cell OptimizationWassim Nostra100% (1)
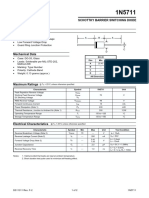
- Schottky Barrier Switching Diode FeaturesDocument2 pagesSchottky Barrier Switching Diode FeaturesОлег КлиновойNo ratings yet
- SIGNificant Client UserGuideDocument65 pagesSIGNificant Client UserGuide12345monica123456789No ratings yet
- PLSC 0013Document7 pagesPLSC 0013balaji100% (1)
- Gateway CaseDocument10 pagesGateway CaseSomesh KhandelwalNo ratings yet
- Wireless power transfer feasibility study for lunar base facilitiesDocument36 pagesWireless power transfer feasibility study for lunar base facilitiesNikhil ReddyNo ratings yet
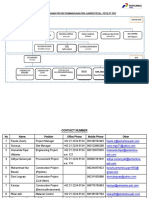
- Org ChartDocument2 pagesOrg ChartES RouzaNo ratings yet
- Solar CellDocument79 pagesSolar CellSarhan WaheedNo ratings yet
- CCNA ACLsDocument14 pagesCCNA ACLsUsama Weince JuttNo ratings yet
- Yutaki S80 Data SheetDocument2 pagesYutaki S80 Data SheetVishal KhiroyaNo ratings yet
- Ingram Transit Center routes and scheduleDocument2 pagesIngram Transit Center routes and schedulemattNo ratings yet
- Desktop Engineering 2010-03Document82 pagesDesktop Engineering 2010-03PerryShopsNo ratings yet
- Get Power Gp12-200 12v 200ahDocument2 pagesGet Power Gp12-200 12v 200ahDouglas SantanaNo ratings yet
- Attach-2 Triconex Technical Product Guide-CompressedDocument39 pagesAttach-2 Triconex Technical Product Guide-Compressedivan_sofyan_aNo ratings yet
- Tmo Sm-g386t Galaxy Avant English User Manual Nea f3Document313 pagesTmo Sm-g386t Galaxy Avant English User Manual Nea f3cozyfootrubsforuNo ratings yet
- PLF-PRC-003 - R1 - PROCEDURE FOR LOWER IN AND BACKFILL - SignedDocument21 pagesPLF-PRC-003 - R1 - PROCEDURE FOR LOWER IN AND BACKFILL - SignedHafiz YunusNo ratings yet
- DX DiagDocument32 pagesDX DiagholomarocorpNo ratings yet
- Sauter Room AutomationDocument27 pagesSauter Room Automationumityldrm100% (2)
- Educational Technology & Education Conferences #45, June To December 2021, Clayton R. WrightDocument155 pagesEducational Technology & Education Conferences #45, June To December 2021, Clayton R. WrightcrwrNo ratings yet
- JCCP - Annual Program For FY2022 (Fixed Ver.) - 20220218Document48 pagesJCCP - Annual Program For FY2022 (Fixed Ver.) - 20220218NÄndo PelÄezNo ratings yet