You might also like
- Chap 7 Solutions PDFDocument34 pagesChap 7 Solutions PDFIbrahim Hussain100% (1)
- Nummerical and Simulation Methods For Calculation of Dynamical Transient Characteristics of Squirrel Cage Induction MotorDocument4 pagesNummerical and Simulation Methods For Calculation of Dynamical Transient Characteristics of Squirrel Cage Induction MotorsaracvasilijaNo ratings yet
- Electrical Engineering Lab Manual for SMK FOMRA Institute of TechnologyDocument63 pagesElectrical Engineering Lab Manual for SMK FOMRA Institute of TechnologyRaja SekarNo ratings yet
- Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalDocument14 pagesDr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalVenomNo ratings yet
- Ac DrivesDocument36 pagesAc DrivesSeshagirirao GalamNo ratings yet
- Three-Phase Induction Motor Parameters and Performance CalculationsDocument4 pagesThree-Phase Induction Motor Parameters and Performance CalculationsJimmy OrajayNo ratings yet
- EE 2257-Control Systems Lab ManualDocument66 pagesEE 2257-Control Systems Lab ManualRam KumarNo ratings yet
- Lab 11Document3 pagesLab 11Abdul RahmanNo ratings yet
- Torque-Speed Characteristic Induction Motor Plot: M-File MatlabDocument2 pagesTorque-Speed Characteristic Induction Motor Plot: M-File MatlabGiorgio Rendra VilariZ'tNo ratings yet
- Assignment EE 4202Document10 pagesAssignment EE 4202Chanki P PyrbotNo ratings yet
- Experiments EMS IIDocument117 pagesExperiments EMS IIOsama Tahir100% (1)
- AC Lab Report NewDocument18 pagesAC Lab Report NewM.Mohamed SarfrazNo ratings yet
- High Chopper Frequency Drive of Wound Rotor Induction MotorDocument5 pagesHigh Chopper Frequency Drive of Wound Rotor Induction MotorchandanjuenggNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- Help - Asynchronous Machine - Blocks (SimPowerSystems™) PDFDocument23 pagesHelp - Asynchronous Machine - Blocks (SimPowerSystems™) PDFnmulyonoNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- Steady-state performance of 3-phase induction motorDocument32 pagesSteady-state performance of 3-phase induction motorSumit SinghNo ratings yet
- Lab Manual: Control Systems Design and Analysis: Using The Quanser Controls Board For NI ELVIS IIIDocument12 pagesLab Manual: Control Systems Design and Analysis: Using The Quanser Controls Board For NI ELVIS IIImishtinilNo ratings yet
- Worked Examples For A Three - Phase Induction MachineDocument12 pagesWorked Examples For A Three - Phase Induction MachineAli AltahirNo ratings yet
- Software Program For Computing and Drawing The Induction Motor Mechanical CharacteristicDocument4 pagesSoftware Program For Computing and Drawing The Induction Motor Mechanical CharacteristicobertocNo ratings yet
- EEE 412 Experiment 5Document8 pagesEEE 412 Experiment 5alamin shawonNo ratings yet
- Why Induction Motors Are Commonly Used in IndustryDocument65 pagesWhy Induction Motors Are Commonly Used in IndustryAhmad Nawawi Ngah100% (1)
- 04 15761-IJEEE pp135-142Document9 pages04 15761-IJEEE pp135-142Sohira QaziNo ratings yet
- Study, Fabrication and Testing of Helical Blades (FYP) Final Year Presentation (Latest)Document40 pagesStudy, Fabrication and Testing of Helical Blades (FYP) Final Year Presentation (Latest)Hassan ArshadNo ratings yet
- Control of Electric Drive - Prof - Priyen S. PatelDocument32 pagesControl of Electric Drive - Prof - Priyen S. PatelAkash Km SinghNo ratings yet
- System Optimization of Motor ResolverDocument27 pagesSystem Optimization of Motor ResolverBlaize PascalNo ratings yet
- EE743 Induction Machines Torque-Speed CharacteristicsDocument22 pagesEE743 Induction Machines Torque-Speed CharacteristicsGogioman Myhay100% (1)
- AC Machine Stator Phases and Induction Motor Rotating Magnetic FieldDocument39 pagesAC Machine Stator Phases and Induction Motor Rotating Magnetic FieldSaneer M SaliNo ratings yet
- Asynchronous MachineDocument15 pagesAsynchronous MachineboumedienNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- 2004 CSAcoust SimDocument6 pages2004 CSAcoust SimberndNo ratings yet
- All ExpDocument37 pagesAll ExpMuhammad SameerNo ratings yet
- Cambio de FrecuenciaDocument20 pagesCambio de FrecuenciaDarness Castillo RodriguezNo ratings yet
- Obtain T-Nr Characteristics of 3-Phase IMDocument5 pagesObtain T-Nr Characteristics of 3-Phase IMGopinath B L NaiduNo ratings yet
- Lecture - 2 - Torque-Speed Characteristics of 3-Phase IMDocument8 pagesLecture - 2 - Torque-Speed Characteristics of 3-Phase IMDina GaranNo ratings yet
- CS Lab ManualDocument28 pagesCS Lab Manualkcop111No ratings yet
- Polyphase Induction MachinesDocument7 pagesPolyphase Induction Machinespurushg62No ratings yet
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- Electrical Engineering Lab Manual For II Mech Part IDocument54 pagesElectrical Engineering Lab Manual For II Mech Part IArivumani80% (5)
- TF Armature Controlled DC MotorDocument9 pagesTF Armature Controlled DC Motoremail2vadivel100% (2)
- HCMC University Final Exam in Electric DrivesDocument3 pagesHCMC University Final Exam in Electric DrivesNguyễn Thị Cẩm TúNo ratings yet
- Test 2 2013 SolutionDocument6 pagesTest 2 2013 SolutionFizah Abdul RahmanNo ratings yet
- Speed Control Of Wound Rotor Induction Motor Using Rotor Resistance ControlDocument3 pagesSpeed Control Of Wound Rotor Induction Motor Using Rotor Resistance ControlHitesh PanigrahiNo ratings yet
- EE311-B Assignment 6 Induction motor torque-speed characteristicDocument2 pagesEE311-B Assignment 6 Induction motor torque-speed characteristicAnasNo ratings yet
- Q.No.2 Using MATLAB, Calculate and Plot The Torque-Speed Characteristics of The Above Motor Both With The Original Rotor Resistance and With The Rotor Resistance DoubledDocument6 pagesQ.No.2 Using MATLAB, Calculate and Plot The Torque-Speed Characteristics of The Above Motor Both With The Original Rotor Resistance and With The Rotor Resistance DoubledKhalid AkramNo ratings yet
- ELEC 2032 (3) Electromechanical System: Induction Motor IIIDocument19 pagesELEC 2032 (3) Electromechanical System: Induction Motor IIIAshvin AshNo ratings yet
- Induction Motor FundamentalsDocument26 pagesInduction Motor FundamentalsarifulNo ratings yet
- Three-Phase Induction Motor Dynamic Mathematical ModelDocument3 pagesThree-Phase Induction Motor Dynamic Mathematical Modelsajs201100% (3)
- 4 Direct Torque Control of Induction Motor Using SimulinkDocument6 pages4 Direct Torque Control of Induction Motor Using Simulinkapi-19508046No ratings yet
- Abassi 2015Document6 pagesAbassi 2015Tarak BenslimaneNo ratings yet
- CSLABMANUALDocument99 pagesCSLABMANUALGOKUL RNo ratings yet
- Digital Simulation of Field-Oriented ControlDocument8 pagesDigital Simulation of Field-Oriented ControlNishantNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Advanced Electric Machines and Drives Lesson PlanDocument4 pagesAdvanced Electric Machines and Drives Lesson PlanTerry rickyNo ratings yet
- Simulation and Speed Control of Induction MotorDocument76 pagesSimulation and Speed Control of Induction MotorNWALLL67% (3)
- Induction Machines: Ee462: Advanced Electric Machines and DrivesDocument5 pagesInduction Machines: Ee462: Advanced Electric Machines and DrivesTerry rickyNo ratings yet
- EE462-Weeks 1-3 - Review IM Reading TasksDocument1 pageEE462-Weeks 1-3 - Review IM Reading TasksTerry rickyNo ratings yet
- EE 462 Wks 1-7 Personal NotesDocument8 pagesEE 462 Wks 1-7 Personal NotesTerry rickyNo ratings yet
- EE462 MATLAB SIMULATION OF INDUCTION MOTOR SPEED CONTROLDocument3 pagesEE462 MATLAB SIMULATION OF INDUCTION MOTOR SPEED CONTROLTerry rickyNo ratings yet
- EE 462 Wks 1-7 Personal NotesDocument8 pagesEE 462 Wks 1-7 Personal NotesTerry rickyNo ratings yet
- Induction Machines: Ee462: Advanced Electric Machines and DrivesDocument5 pagesInduction Machines: Ee462: Advanced Electric Machines and DrivesTerry rickyNo ratings yet
- EE462-Weeks 1-3 - Review IM Reading TasksDocument1 pageEE462-Weeks 1-3 - Review IM Reading TasksTerry rickyNo ratings yet
- EE462 MATLAB SIMULATION OF INDUCTION MOTOR SPEED CONTROLDocument3 pagesEE462 MATLAB SIMULATION OF INDUCTION MOTOR SPEED CONTROLTerry rickyNo ratings yet
- EE331 Analog Communications Lab #01: DSB AM Waveform GenerationDocument2 pagesEE331 Analog Communications Lab #01: DSB AM Waveform GenerationTerry rickyNo ratings yet
- Jaeger JF 1961 PHD ThesisDocument156 pagesJaeger JF 1961 PHD ThesisTerry rickyNo ratings yet
- Fly-Back Converter Operation and DesignDocument15 pagesFly-Back Converter Operation and DesignRyanLee01No ratings yet
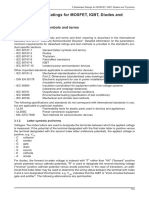
- Section2 Datasheet Ratings For MOSFET IGBT Diodes and Thyristors PDFDocument84 pagesSection2 Datasheet Ratings For MOSFET IGBT Diodes and Thyristors PDFTerry rickyNo ratings yet
- Power Semiconductor Device NptelDocument14 pagesPower Semiconductor Device NptelMohammad Aminul IslamNo ratings yet
- Cycloconverters: Fig.1 Block Diagram of A CycloconverterDocument17 pagesCycloconverters: Fig.1 Block Diagram of A Cycloconvertersagar jaiswal100% (3)
- Isolated DC-DC Converters (Benny Yeung)Document10 pagesIsolated DC-DC Converters (Benny Yeung)Farhan MalikNo ratings yet
- Electronic Switch Which, As It Was Developed, Came To Combine HighDocument3 pagesElectronic Switch Which, As It Was Developed, Came To Combine HighTerry rickyNo ratings yet
- Calculator - Fx300MS 115MS EaDocument19 pagesCalculator - Fx300MS 115MS EaAdam VinsonNo ratings yet
- Cycloconverter Operation and Voltage Polarity AnalysisDocument9 pagesCycloconverter Operation and Voltage Polarity AnalysisTerry rickyNo ratings yet
- A LN Ass Eir DissertationDocument166 pagesA LN Ass Eir DissertationFlashPTNo ratings yet
- EE351 TEST 2 - June04 - 2020Document3 pagesEE351 TEST 2 - June04 - 2020Terry rickyNo ratings yet
- PPT Isolated DC-DC Converters (Benny Yeung)Document31 pagesPPT Isolated DC-DC Converters (Benny Yeung)Terry rickyNo ratings yet
- CPU Instruction SetDocument16 pagesCPU Instruction SetTerry rickyNo ratings yet
- Information Sheet, Type 754: The New Generation of Pole-Reversal Control UnitsDocument2 pagesInformation Sheet, Type 754: The New Generation of Pole-Reversal Control UnitsBaneMarkovicNo ratings yet
- ABB Motor Surge Protection Units - MSP - 2GUZ3101-Rev1Document4 pagesABB Motor Surge Protection Units - MSP - 2GUZ3101-Rev1Suresh K KrishnasamyNo ratings yet
- Shakib DTEDocument9 pagesShakib DTErohitmadje32No ratings yet
- Mitsubishi Fx3u 20ssc H Sscnet Motion Users ManualDocument304 pagesMitsubishi Fx3u 20ssc H Sscnet Motion Users ManualCORTOCIRCUITANTENo ratings yet
- DRT-WP-PCIC-2008-DRT-drive Ride ThruDocument7 pagesDRT-WP-PCIC-2008-DRT-drive Ride ThrupasswordNo ratings yet
- Mobis Datasheet ObcDocument44 pagesMobis Datasheet ObcclipclapNo ratings yet
- Components:: R1 R2 R3 R4 C1 C2 D1 D2Document3 pagesComponents:: R1 R2 R3 R4 C1 C2 D1 D2Anton Pers100% (1)
- Electricity NotesDocument4 pagesElectricity NotesmeowNo ratings yet
- Catalogo Completo1Document14 pagesCatalogo Completo1Maicol Lopez HidalgoNo ratings yet
- Short Notes On Servo MotorDocument2 pagesShort Notes On Servo MotorHimansu Goswami100% (3)
- Physical Sciences P1 May-June 2022 EngDocument19 pagesPhysical Sciences P1 May-June 2022 Engbonks depoiNo ratings yet
- Manual / Handbuch Spare Parts List / ErsatzteillisteDocument59 pagesManual / Handbuch Spare Parts List / Ersatzteillisteneno111No ratings yet
- Conductors of Heat and ElectricityDocument20 pagesConductors of Heat and ElectricityMarianne Francisco100% (1)
- VCB 06 (1) .07.07 PDFDocument56 pagesVCB 06 (1) .07.07 PDFrazvansasuNo ratings yet
- An Impedance Source Multi-Level Three Phase Inverter With Common Mode Voltage Elimination and Dead Time CompensationDocument18 pagesAn Impedance Source Multi-Level Three Phase Inverter With Common Mode Voltage Elimination and Dead Time CompensationRadu GodinaNo ratings yet
- Data Sheets For Ieee 14 Bus System 19 - Appendix PDFDocument19 pagesData Sheets For Ieee 14 Bus System 19 - Appendix PDFaldiNo ratings yet
- Bajaj Type Test - 15100046-Test ReportDocument2 pagesBajaj Type Test - 15100046-Test ReportCHakuNo ratings yet
- Cat 938k Electrical CircuitDocument40 pagesCat 938k Electrical CircuitOlivier Brouard50% (2)
- Design Code for Large Coal-fired Power PlantsDocument173 pagesDesign Code for Large Coal-fired Power PlantsCourage MurevesiNo ratings yet
- Linear Wire Antennas: EE-4382/5306 - Antenna EngineeringDocument24 pagesLinear Wire Antennas: EE-4382/5306 - Antenna EngineeringJose Nathaniel BonaNo ratings yet
- Odv 065R15M GDocument1 pageOdv 065R15M GJosueMancoBarrenecheaNo ratings yet
- 4983-DS120-402, Protección Contra SobretensiónDocument2 pages4983-DS120-402, Protección Contra SobretensiónAnthonyNo ratings yet
- Data Sheet For Medium Voltage MotorDocument7 pagesData Sheet For Medium Voltage MotorNael SwedanNo ratings yet
- REVERSIBLE STAR DELTA MOTOR CONTROLLER CONTROL CIRCUIT DIAGRAM GUIDEDocument6 pagesREVERSIBLE STAR DELTA MOTOR CONTROLLER CONTROL CIRCUIT DIAGRAM GUIDEAbdul Haleem100% (3)
- Pressure Sensors - Nautilus: For Control Circuits, Type XML-F PresentationDocument11 pagesPressure Sensors - Nautilus: For Control Circuits, Type XML-F PresentationAnonymous IN80L4rRNo ratings yet
- Micrologic Selection GuideDocument8 pagesMicrologic Selection GuideNuengruthai WeerawattanaNo ratings yet
- CM-UFD.M31: Grid Feeding Monitoring According To VDE-AR-N 4105 and BDEWDocument17 pagesCM-UFD.M31: Grid Feeding Monitoring According To VDE-AR-N 4105 and BDEWZaharia MarianNo ratings yet
- Lab05 Flip FlopsDocument8 pagesLab05 Flip Flopskhanjamil12No ratings yet
- Chapter 3-Part 2 - Angle ModulationDocument34 pagesChapter 3-Part 2 - Angle Modulationyohans shegawNo ratings yet
- ELMG Digital Power Three Key Issue in The Digital Control of Power ElectronicsDocument16 pagesELMG Digital Power Three Key Issue in The Digital Control of Power ElectronicsRicardo Alonso Muñoz CanalesNo ratings yet