You might also like
- Solution Manual For Statistics For The Behavioral Sciences 10th EditionDocument24 pagesSolution Manual For Statistics For The Behavioral Sciences 10th Editiondonaldpollardkoatengwxj100% (40)
- Deternmination IM ParametersDocument26 pagesDeternmination IM ParametersAli AltahirNo ratings yet
- Genetic Algorithms in Design of A Synchronous Reluctance MotorDocument6 pagesGenetic Algorithms in Design of A Synchronous Reluctance MotoredumacerenNo ratings yet
- Law Exam ReviewerDocument20 pagesLaw Exam ReviewerNeilyn Bongalan50% (2)
- Ranged Queries Using Bloom Filters FinalDocument19 pagesRanged Queries Using Bloom Filters FinalAlice Qing WongNo ratings yet
- Help - Asynchronous Machine - Blocks (SimPowerSystems™) PDFDocument23 pagesHelp - Asynchronous Machine - Blocks (SimPowerSystems™) PDFnmulyonoNo ratings yet
- Asynchronous MachineDocument21 pagesAsynchronous MachineMohanraj NidumoluNo ratings yet
- Slip Power Recovery SchemesDocument24 pagesSlip Power Recovery SchemesMagudeeswaran MagudeeswaranNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- Induction MotorsDocument26 pagesInduction Motorsravin singhNo ratings yet
- Induction MotorsDocument26 pagesInduction Motorsfajar888No ratings yet
- CYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorDocument32 pagesCYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorSumit SinghNo ratings yet
- Help - Permanent Magnet Synchronous Machine - Blocks (SimPowerSystems™)Document14 pagesHelp - Permanent Magnet Synchronous Machine - Blocks (SimPowerSystems™)lojain centerNo ratings yet
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- Beee Unit-4 Induction & Synchronous MotorsDocument27 pagesBeee Unit-4 Induction & Synchronous MotorssrujithvedagiriNo ratings yet
- Help - Synchronous Machine - Blocks (SimPowerSystems™)Document14 pagesHelp - Synchronous Machine - Blocks (SimPowerSystems™)Luis AguirreNo ratings yet
- High Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperDocument5 pagesHigh Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperchandanjuenggNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- TF Armature Controlled DC MotorDocument9 pagesTF Armature Controlled DC Motoremail2vadivel100% (2)
- Solid State Drives: Notes of Lesson PlanDocument24 pagesSolid State Drives: Notes of Lesson PlanetasureshNo ratings yet
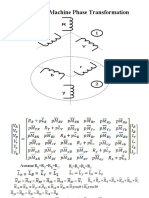
- Induction Machine Phase TransformationDocument20 pagesInduction Machine Phase Transformation7sn omerNo ratings yet
- Induction MotorDocument39 pagesInduction MotorSaneer M SaliNo ratings yet
- ECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsDocument42 pagesECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsVikas Roy100% (1)
- Ac DrivesDocument36 pagesAc Drivesaswardi50% (2)
- List of Variables and Symbols: De-Q eDocument4 pagesList of Variables and Symbols: De-Q egoksanisilNo ratings yet
- Project Report PDFDocument11 pagesProject Report PDFAlind DubeyNo ratings yet
- Polyphase Induction MachinesDocument7 pagesPolyphase Induction Machinespurushg62No ratings yet
- Induction MachineDocument48 pagesInduction MachinechethanNo ratings yet
- Lecture IMDocument49 pagesLecture IMVasanth 1116No ratings yet
- Parameter Estimation and Online Adaptation of Rotor Time Constant For Induction Motor Drive PDFDocument13 pagesParameter Estimation and Online Adaptation of Rotor Time Constant For Induction Motor Drive PDFsalah eddineNo ratings yet
- Chapter 6B - IMDocument31 pagesChapter 6B - IMNour Ziad Ibrahim AlkurdiNo ratings yet
- EE 2257-Control Systems Lab ManualDocument66 pagesEE 2257-Control Systems Lab ManualRam KumarNo ratings yet
- 02-1 Synchronous MachinesDocument48 pages02-1 Synchronous MachinesvenikiranNo ratings yet
- Soal UTS 2017Document6 pagesSoal UTS 2017Kukuh WidarsonoNo ratings yet
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualDocument162 pagesBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualAntonio LeonNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- Chapter 5: Speed-Torque Characteristics of Electric MotorsDocument46 pagesChapter 5: Speed-Torque Characteristics of Electric MotorsFrozenTuxNo ratings yet
- EE462 Lab Assignement 1Document14 pagesEE462 Lab Assignement 1Terry rickyNo ratings yet
- Induction Motors PDFDocument108 pagesInduction Motors PDFKshitij ShrivastavaNo ratings yet
- Induction Machines: Principle of Operation and Equivalent Circuit ModelDocument15 pagesInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminNo ratings yet
- Induction Motor Drive PDFDocument8 pagesInduction Motor Drive PDFSwostik RoutNo ratings yet
- Ac Motor Drives: Presentation OnDocument19 pagesAc Motor Drives: Presentation Onruchita dahadNo ratings yet
- ELEC 2032 (3) Electromechanical System: Induction Motor IIIDocument19 pagesELEC 2032 (3) Electromechanical System: Induction Motor IIIAshvin AshNo ratings yet
- Wind TurbineDocument22 pagesWind TurbinesuryatejaNo ratings yet
- Traditional Design of Cage Rotor Induction MotorsDocument35 pagesTraditional Design of Cage Rotor Induction MotorsMohammad Gulam AhamadNo ratings yet
- 7 Induction Motor BasicsDocument51 pages7 Induction Motor BasicsFos AlharbiNo ratings yet
- Electrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesDocument63 pagesElectrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesTinyiko ChaukeNo ratings yet
- G Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDocument4 pagesG Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDante GuajardoNo ratings yet
- Induction MotorDocument28 pagesInduction Motorsumithra100% (2)
- Which Is Defined By: : Synchronous SpeedDocument16 pagesWhich Is Defined By: : Synchronous SpeedHsanajab IdbNo ratings yet
- Vector Control of Induction Motor Without Shaft EncoderDocument8 pagesVector Control of Induction Motor Without Shaft Encoderapi-3826450No ratings yet
- Assignment EE 4202Document10 pagesAssignment EE 4202Chanki P PyrbotNo ratings yet
- EMECDocument73 pagesEMECdivyansh singhNo ratings yet
- EE 4PM4 Quiz 1 Solutions - 2016-17Document4 pagesEE 4PM4 Quiz 1 Solutions - 2016-17PreethamNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2From EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2No ratings yet
- Advanced Power System Analysis: Assist. Prof. Dr. Mohammed Yahya Dr. Mahmood Taha AL-KhyaatDocument4 pagesAdvanced Power System Analysis: Assist. Prof. Dr. Mohammed Yahya Dr. Mahmood Taha AL-KhyaatboumedienNo ratings yet
- GTOEM4Document9 pagesGTOEM4boumedienNo ratings yet
- What Does It Mean by Generalized Theory of Electrical MachinesDocument6 pagesWhat Does It Mean by Generalized Theory of Electrical MachinesboumedienNo ratings yet
- Linear TransformationsDocument12 pagesLinear TransformationsboumedienNo ratings yet
- المحاضرة الثالثةDocument21 pagesالمحاضرة الثالثةboumedienNo ratings yet
- Lecture 2Document22 pagesLecture 2boumedienNo ratings yet
- Asynchronous MachineDocument15 pagesAsynchronous MachineboumedienNo ratings yet
- Lecture 2Document22 pagesLecture 2boumedienNo ratings yet
- A Physical Absorption Process For The Capture of Co From Co - Rich Natural Gas StreamsDocument6 pagesA Physical Absorption Process For The Capture of Co From Co - Rich Natural Gas StreamssinhleprovietNo ratings yet
- Level 7 AnswersDocument20 pagesLevel 7 AnswersaftabNo ratings yet
- Bangladesh Informatics Olympiad 2012 (Divisional)Document5 pagesBangladesh Informatics Olympiad 2012 (Divisional)Science Olympiad BlogNo ratings yet
- Unit-2: The Basics and Console Applications Inc#Document43 pagesUnit-2: The Basics and Console Applications Inc#mananNo ratings yet
- Time Response Lecture NoteDocument40 pagesTime Response Lecture NoteNurulNo ratings yet
- Database Assignment-2Document10 pagesDatabase Assignment-2binodvickyNo ratings yet
- Annual Examination 2021-2022-CombinedDocument15 pagesAnnual Examination 2021-2022-CombinedElectronic4 Arts3No ratings yet
- Mathematics-Optional: by Venkanna Sir and Satya Sir PDE 2013-2019Document6 pagesMathematics-Optional: by Venkanna Sir and Satya Sir PDE 2013-2019Kriti ChoudharyNo ratings yet
- Ring Theory NotesDocument10 pagesRing Theory NotesManojKumarSinghNo ratings yet
- TCS Placement Paper 6Document18 pagesTCS Placement Paper 6Anurag BhattacharyaNo ratings yet
- Lesson 9 Stem 1BDocument9 pagesLesson 9 Stem 1BJune Patricia AraizNo ratings yet
- Time: 3 Hours Total Marks: 100: Printed Pages: 02 Sub Code: KMB104/KMT104 Paper Id: 270104 Roll NoDocument2 pagesTime: 3 Hours Total Marks: 100: Printed Pages: 02 Sub Code: KMB104/KMT104 Paper Id: 270104 Roll NoNishant TripathiNo ratings yet
- Title: Interval Estimation: σ known.: Confidence Interval Lower Limit Upper LimitDocument2 pagesTitle: Interval Estimation: σ known.: Confidence Interval Lower Limit Upper LimitChiragNarulaNo ratings yet
- SIADocument64 pagesSIAmerinofalNo ratings yet
- How To Choose The Correct Statistical TestDocument51 pagesHow To Choose The Correct Statistical TestTheGimhan123No ratings yet
- Math 7Document20 pagesMath 7Jaysie EscalanteNo ratings yet
- W.D .Gaan Full Study ContentDocument2 pagesW.D .Gaan Full Study ContentAabhasNo ratings yet
- Binomial and Poisson DistributionsDocument2 pagesBinomial and Poisson DistributionsAnthea ClarkeNo ratings yet
- 07 01ChapGereDocument14 pages07 01ChapGereChristina BuckleNo ratings yet
- Soal Ujian Mat Diskrit 3Document1 pageSoal Ujian Mat Diskrit 3Media MaxNo ratings yet
- Pacholski Practical MAM 6 2015Document4 pagesPacholski Practical MAM 6 2015dacaNo ratings yet
- CS221 - Artificial Intelligence - Machine Learning - 6 Non-Linear FeaturesDocument22 pagesCS221 - Artificial Intelligence - Machine Learning - 6 Non-Linear FeaturesArdiansyah Mochamad NugrahaNo ratings yet
- Unit-2 Propositional Logic and Predicate LogicDocument15 pagesUnit-2 Propositional Logic and Predicate LogicPriyank PatelNo ratings yet
- Design of Experiments - Basic Concepts - Treatment - Experimental Unit - Experimental Error - Basic Principle - Replication, Randomization and Local Control.Document3 pagesDesign of Experiments - Basic Concepts - Treatment - Experimental Unit - Experimental Error - Basic Principle - Replication, Randomization and Local Control.D K SRIVASTAVANo ratings yet
- Daily Lesson Plan For Pythagorean Theorem.Document5 pagesDaily Lesson Plan For Pythagorean Theorem.Denell N. Agno100% (2)
- Aircraft Structures-II - U1 - L1 - T2 - Problems On Direct Stress Distribution For Symmetrical Bending of BeamsDocument9 pagesAircraft Structures-II - U1 - L1 - T2 - Problems On Direct Stress Distribution For Symmetrical Bending of Beamssarathkumar sebastinNo ratings yet
- Quinn OxDocument1 pageQuinn OxPriyank GandhiNo ratings yet