You might also like
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Module 4 1Document27 pagesModule 4 1Sawai PareshNo ratings yet
- Module 4Document27 pagesModule 4Sweshkannan Sk0% (1)
- Mechanism Design Model Question With KeyDocument8 pagesMechanism Design Model Question With KeyRenold ElsenNo ratings yet
- 11.kinematic SynthesisDocument13 pages11.kinematic SynthesisSatyam AhirwalNo ratings yet
- Velocity and AccelartionDocument56 pagesVelocity and Accelartionadus lakshmanNo ratings yet
- Module 4 - SYNTHESISDocument25 pagesModule 4 - SYNTHESISDhanashree PanchawatkarNo ratings yet
- Caed ProblemsDocument20 pagesCaed ProblemsPardeepNo ratings yet
- Chapter 5 - MechanismDocument31 pagesChapter 5 - MechanismhamryNo ratings yet
- Unit2&3 HRDocument60 pagesUnit2&3 HRtarasasankaNo ratings yet
- Unit 1Document70 pagesUnit 1balajimetturNo ratings yet
- Electromagnetics (EM) - The Study of Electric and Magnetic PhenomenaDocument34 pagesElectromagnetics (EM) - The Study of Electric and Magnetic PhenomenablindwidowNo ratings yet
- Kinematics of MechanismsDocument82 pagesKinematics of MechanismsDharmesh PatelNo ratings yet
- Synthesis of MechanismsDocument16 pagesSynthesis of MechanismsDasika Sunder100% (1)
- Notes1 2 76 12 11 2020 14 09Document75 pagesNotes1 2 76 12 11 2020 14 09Oo-baid U-safzaiNo ratings yet
- Synthesis of Mech With Program in CDocument5 pagesSynthesis of Mech With Program in Cdeshdeepak13No ratings yet
- L01 - Synthesis of MechanismDocument28 pagesL01 - Synthesis of MechanismSiddhant SharmaNo ratings yet
- Mechanism 1Document82 pagesMechanism 1papulimech100% (3)
- Mechanism Synthesis, GraphicalDocument32 pagesMechanism Synthesis, GraphicalShobhitAgarwalNo ratings yet
- Mechanism: Mechanism - Part of A Machine, Which Transmit Motion and Power From Input Point To Output PointDocument68 pagesMechanism: Mechanism - Part of A Machine, Which Transmit Motion and Power From Input Point To Output PointelangandhiNo ratings yet
- Mechanics Machines IaDocument12 pagesMechanics Machines IaJosline MuriikiNo ratings yet
- TopicISynthesisPartI DetailDocument32 pagesTopicISynthesisPartI Detailm_er100No ratings yet
- Review SynthesisDocument11 pagesReview Synthesissam hamNo ratings yet
- Kinematics of Machines Compiled HariraoDocument94 pagesKinematics of Machines Compiled HariraoUpender DhullNo ratings yet
- Kinematics of Machinery: Module 03 - Kinematic Synthesis Design ProcessDocument17 pagesKinematics of Machinery: Module 03 - Kinematic Synthesis Design ProcessJithin KNo ratings yet
- Kinema TicsDocument15 pagesKinema TicssureshNo ratings yet
- Kinematics of MechanismsDocument82 pagesKinematics of MechanismsviahulNo ratings yet
- ME306-Fall 2013 - Chapter (3) - Velocities Analysis of Mechanisms PDFDocument13 pagesME306-Fall 2013 - Chapter (3) - Velocities Analysis of Mechanisms PDFmurad_ashourNo ratings yet
- Linkage AnalysisDocument17 pagesLinkage AnalysisCharlene SmithNo ratings yet
- Chapter 16: Planar Kinematics of A Rigid BodyDocument33 pagesChapter 16: Planar Kinematics of A Rigid BodyineedchemicalxNo ratings yet
- Coordinate and Unit VectorDocument18 pagesCoordinate and Unit VectorKristi YoshikawaNo ratings yet
- Mechanism Synthesis, Graphical - Lect1Document22 pagesMechanism Synthesis, Graphical - Lect1Naveen KanchiNo ratings yet
- Electromagnetic Fields - Coordinate and Unit VectorDocument18 pagesElectromagnetic Fields - Coordinate and Unit VectorSriramNo ratings yet
- Approximate AnalysisDocument35 pagesApproximate AnalysisSyahir HamidonNo ratings yet
- Kinematic Synthesis of MechanismsDocument25 pagesKinematic Synthesis of MechanismsHarshan Arumugam75% (4)
- Physical Quantities & MEASUREMENTS (3 Hours)Document63 pagesPhysical Quantities & MEASUREMENTS (3 Hours)Muhd Fadhlan NaqiuddinNo ratings yet
- MAE 375 Analytical Linkage Synthesis: Chapter 5 Lecture NotesDocument50 pagesMAE 375 Analytical Linkage Synthesis: Chapter 5 Lecture NotesMan ElNo ratings yet
- Bahir Dar University School of Civil and Water Resource EngineeringDocument40 pagesBahir Dar University School of Civil and Water Resource EngineeringMichael AssefaNo ratings yet
- Freuden SteinDocument9 pagesFreuden SteinmodisuryaharshaNo ratings yet
- Engineering Mechanics: Statics: Force System ResultantsDocument193 pagesEngineering Mechanics: Statics: Force System ResultantsVC Chua Yee LeongNo ratings yet
- Part VI Printer - ImpDocument21 pagesPart VI Printer - ImpRahul Kumar KNo ratings yet
- Unit II Curves & SurfacesDocument57 pagesUnit II Curves & Surfacesvishwajeet patilNo ratings yet
- Three Dimensional ConceptsDocument52 pagesThree Dimensional Conceptsmichael.ferrarisNo ratings yet
- Approximate Analysis of Statically Indeterminate StructuresDocument35 pagesApproximate Analysis of Statically Indeterminate Structuresdixn__No ratings yet
- Kinematics OF Machinery: Adithya Institute of TechnologyDocument34 pagesKinematics OF Machinery: Adithya Institute of TechnologybalajimetturNo ratings yet
- 15 2505 Design Report0203 99 103Document5 pages15 2505 Design Report0203 99 103Kurnia WanNo ratings yet
- Geometry Cheat Sheet: Segment Addition Postulate - If Three Points A, B, and C Are Collinear and B Is Between ADocument20 pagesGeometry Cheat Sheet: Segment Addition Postulate - If Three Points A, B, and C Are Collinear and B Is Between AJack MessarosNo ratings yet
- CG-module 4 NotesDocument21 pagesCG-module 4 NotesRajeswari RNo ratings yet
- KTOM Exam Paper With SolutionDocument17 pagesKTOM Exam Paper With Solutionhiren koriyaNo ratings yet
- Synthesis of Linkages: Types of Synthesis - Based On The Desired Output Motion, There AreDocument13 pagesSynthesis of Linkages: Types of Synthesis - Based On The Desired Output Motion, There ArebobNo ratings yet
- Teori Grup Dan Vibrasi-RevisiDocument204 pagesTeori Grup Dan Vibrasi-RevisiDhieka NopiharguNo ratings yet
- InorgChem I L03Document54 pagesInorgChem I L03유지인No ratings yet
- Design of Variable Coupler Curve Four-Bar Mechanisms: Ren-Chung Soong and Sun-Li WuDocument9 pagesDesign of Variable Coupler Curve Four-Bar Mechanisms: Ren-Chung Soong and Sun-Li WuAshokNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- M.tech. First Year Syllabus - 2020Document445 pagesM.tech. First Year Syllabus - 2020Justine JacobNo ratings yet
- Slider Crank Dynamic AnalysisDocument2 pagesSlider Crank Dynamic AnalysisJustine JacobNo ratings yet
- Bibliography: Text Book of Electircal Engineering by C.L Wadhwa Maintenance Engineering by Sushil KumarDocument1 pageBibliography: Text Book of Electircal Engineering by C.L Wadhwa Maintenance Engineering by Sushil KumarJustine JacobNo ratings yet
- The FGM Helps To Reduce Stress, Prevent Peeling of The Coated Layer, Prevent Microcrack Propagation, EtcgsdhcxvhbufhnijdjiDocument1 pageThe FGM Helps To Reduce Stress, Prevent Peeling of The Coated Layer, Prevent Microcrack Propagation, EtcgsdhcxvhbufhnijdjiJustine JacobNo ratings yet
- The FGM Helps To Reduce Stress, Prevent Peeling of The Coated Layer, Prevent Microcrack Propagation, EtcDocument1 pageThe FGM Helps To Reduce Stress, Prevent Peeling of The Coated Layer, Prevent Microcrack Propagation, EtcJustine JacobNo ratings yet
- Esd5500E Series Speed Control Unit: Model DescriptionDocument23 pagesEsd5500E Series Speed Control Unit: Model DescriptionEslam MahfouzNo ratings yet
- Lab 2 - Graphical Linkage SynthesisDocument16 pagesLab 2 - Graphical Linkage SynthesisSanjanaLakshmiNo ratings yet
- Module 2 Simple Mechanisms EditedDocument58 pagesModule 2 Simple Mechanisms EditedNirshadNo ratings yet
- GuiDocument98 pagesGuimadhuriNo ratings yet
- Homework 2 SolutionDocument13 pagesHomework 2 SolutionDynamix SolverNo ratings yet
- MECH 343 Course Outline 2020Document10 pagesMECH 343 Course Outline 2020Navjot SinghNo ratings yet
- Statement:: PROBLEM 6-29Document4 pagesStatement:: PROBLEM 6-29AmalinaNo ratings yet
- Design of Drag-Link Mechanisms With Optimum Transmission AngleDocument5 pagesDesign of Drag-Link Mechanisms With Optimum Transmission AngleNigussie AdemNo ratings yet
- 225 Series Electric Actuator: Engine Governing SystemsDocument1 page225 Series Electric Actuator: Engine Governing SystemsAmborsius SitorusNo ratings yet
- Theory of Machines Chapter 1cc (05.03.2016)Document78 pagesTheory of Machines Chapter 1cc (05.03.2016)Qasim AliNo ratings yet
- CVDocument43 pagesCVShishirkumar KadamNo ratings yet
- Unit 1Document54 pagesUnit 1Anbu Selvan0% (1)
- MoM ManualDocument79 pagesMoM ManualHamid CheemaNo ratings yet
- Cat Electronic Technician 2015A v1.0 Product Status ReportDocument8 pagesCat Electronic Technician 2015A v1.0 Product Status Reportmostafa aliNo ratings yet
- Motion and Machinery: Displacement, Velocity and Acceleration, Linkage and ConstraintsDocument41 pagesMotion and Machinery: Displacement, Velocity and Acceleration, Linkage and ConstraintsJhEan LoUiseNo ratings yet
- Modutrol IV Motors Series 90Document12 pagesModutrol IV Motors Series 90Antonio MancusoNo ratings yet
- Calculation of Overspeed Trip Mechanism Linkage ForcesDocument34 pagesCalculation of Overspeed Trip Mechanism Linkage ForcesJhon DonNo ratings yet
- Computer-Aided Analysis of Mechanical SystemsDocument388 pagesComputer-Aided Analysis of Mechanical SystemsLaurent Keersmaekers100% (3)
- Me Machine DesignDocument86 pagesMe Machine DesignManjunath NadarajanNo ratings yet
- Video Links For DOM 6edDocument3 pagesVideo Links For DOM 6edNguyễn Hữu Quốc KhánhNo ratings yet
- Tutorial 3: Autumn-2022Document3 pagesTutorial 3: Autumn-2022Raman kumarNo ratings yet
- Tom MCQ UNIT 1Document25 pagesTom MCQ UNIT 1Kumar PachareNo ratings yet
- Ed 7202 QP Ut 2Document5 pagesEd 7202 QP Ut 2pandirajaNo ratings yet
- A Patient-Specific 3D Model of The Knee To Compare The Femoral Rollback Before and After Total Knee Arthroplasty (TKA)Document10 pagesA Patient-Specific 3D Model of The Knee To Compare The Femoral Rollback Before and After Total Knee Arthroplasty (TKA)mamyeu1801No ratings yet
- A Simplified Dynamic Model For Front-End Loader Design: M D WorleyDocument19 pagesA Simplified Dynamic Model For Front-End Loader Design: M D WorleyKevinCollenNo ratings yet
- 3 - Robot MechanismsDocument6 pages3 - Robot MechanismsKetan PanchalNo ratings yet
- ABB ADVAC Circuit Breaker BrochureDocument20 pagesABB ADVAC Circuit Breaker BrochurepitarrilloNo ratings yet
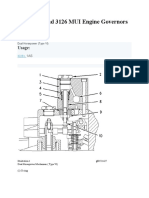
- 3114, 3116 and 3126 MUI Engine Governors Caterpillar: UsageDocument2 pages3114, 3116 and 3126 MUI Engine Governors Caterpillar: UsagezeljkoNo ratings yet
- A Thesaurus of MechanismsDocument30 pagesA Thesaurus of Mechanismsafit666100% (1)
- 1700 Animated 3Document143 pages1700 Animated 3Aquino MiguelNo ratings yet