You might also like
- Test Bank Diversity and Society Race, Ethnicity, and Gender 5th Edition by Joseph F. Healey, Andi StepnickDocument6 pagesTest Bank Diversity and Society Race, Ethnicity, and Gender 5th Edition by Joseph F. Healey, Andi StepnicklewisbachaNo ratings yet
- Scion XB 2005 Audio System Wiring DiagramDocument2 pagesScion XB 2005 Audio System Wiring Diagramsixdust67% (6)
- GILBERT & KUHN - A History of EstheticsDocument601 pagesGILBERT & KUHN - A History of EstheticsTheo100% (2)
- Physics RulesDocument19 pagesPhysics RulesAhmed GhanamNo ratings yet
- Lect 5Document14 pagesLect 5MunyahNo ratings yet
- Lecture 02 - GearsDocument25 pagesLecture 02 - Gearsmohammedshaiban000No ratings yet
- Gear Mechanisms - Class-Notes 4Document7 pagesGear Mechanisms - Class-Notes 4steve ogagaNo ratings yet
- Condition of The Surface of Commutators and Rings-Roughness: Technical Note Sta Be 16-1 GBDocument2 pagesCondition of The Surface of Commutators and Rings-Roughness: Technical Note Sta Be 16-1 GBloulou_beNo ratings yet
- Spur Gear CalculationsDocument7 pagesSpur Gear Calculationsaniket patilNo ratings yet
- P1 RW Grids H V VRT A VRW HRT HRW Paste T P2 A1 Grid Weight A2 Weight Wet PasteDocument1 pageP1 RW Grids H V VRT A VRW HRT HRW Paste T P2 A1 Grid Weight A2 Weight Wet Pasteav3888871No ratings yet
- 05 Geometric Details Hairpin Bends 05 Hairpin BendsDocument1 page05 Geometric Details Hairpin Bends 05 Hairpin BendsBinod Raj GiriNo ratings yet
- Spur Gear: Speed Input Speed Output R R R R R VDocument12 pagesSpur Gear: Speed Input Speed Output R R R R R Vprakash tyagiNo ratings yet
- Hydrostatic Bearings-An IntroductionDocument15 pagesHydrostatic Bearings-An IntroductionVivek KevivNo ratings yet
- Thrust Block DesignDocument12 pagesThrust Block DesignJorge Castro Cucurella100% (1)
- Circle PropertiesDocument54 pagesCircle PropertiesNabeeha RaheelNo ratings yet
- Linear GuideDocument1,539 pagesLinear Guidered_shobo_85No ratings yet
- Physics Formula SheetDocument2 pagesPhysics Formula SheetAbderrafie BCNo ratings yet
- Lecture14 Ee474 Miller Ota PDFDocument22 pagesLecture14 Ee474 Miller Ota PDFShanNo ratings yet
- @bohring Bot09 Assignment # EMI & AC Eng@HeyitsyashXDDocument71 pages@bohring Bot09 Assignment # EMI & AC Eng@HeyitsyashXDi.anupamalokNo ratings yet
- Spring BackDocument4 pagesSpring BackKenneth PengNo ratings yet
- Low Frequency Characteristic Analysis of Voltage Mode Boost ConverterDocument4 pagesLow Frequency Characteristic Analysis of Voltage Mode Boost Converterkakkunuru kashyapNo ratings yet
- Strength Calculation As Per Ibr Boiler Maker'S No.: Atpl-Rb002Document9 pagesStrength Calculation As Per Ibr Boiler Maker'S No.: Atpl-Rb002mohan babuNo ratings yet
- Square and RectangleDocument5 pagesSquare and RectangleVishnu PrasadNo ratings yet
- 17 TonsDocument8 pages17 TonsFernando Humberto100% (1)
- Foundations Part2.b 2Document6 pagesFoundations Part2.b 2ghost1408No ratings yet
- 107de736assign 1 QuesDocument3 pages107de736assign 1 Quesaayushkumarsinghec22a1561No ratings yet
- Aiits 2325 PT II Jeea Paper 1 SolDocument11 pagesAiits 2325 PT II Jeea Paper 1 SolRayNo ratings yet
- Unit 4 Fluid Dyanamics 1 1Document76 pagesUnit 4 Fluid Dyanamics 1 1ROYAL LION GAMERNo ratings yet
- Losses in PipesDocument43 pagesLosses in PipesSomnath Swamy100% (1)
- Visio-CONV - Z INV + VIB ABB V1 - 0Document4 pagesVisio-CONV - Z INV + VIB ABB V1 - 0mochammad aripinNo ratings yet
- Tabivcal en Page24Document1 pageTabivcal en Page24E-mail SupportNo ratings yet
- 7,65 Chamber DimensionsDocument1 page7,65 Chamber DimensionsJan PeterkaNo ratings yet
- Gravity Segregation in Gas-Injection EORDocument23 pagesGravity Segregation in Gas-Injection EORNico SantosoNo ratings yet
- ABS (W/ VSC), Hill-Start Assist Control, TRC, VSCDocument10 pagesABS (W/ VSC), Hill-Start Assist Control, TRC, VSCThảo Đào ThuNo ratings yet
- Per: AISI Spec S100-12 For: Lipped Z Cold Formed SectionDocument4 pagesPer: AISI Spec S100-12 For: Lipped Z Cold Formed SectionTri huỳnhNo ratings yet
- Design of Clutch PlateDocument21 pagesDesign of Clutch PlateYagnesh PatelNo ratings yet
- ESC201 UDas Lec20class BJT AmplifierDocument7 pagesESC201 UDas Lec20class BJT AmplifierManan AgarwalNo ratings yet
- Fluid Mechanics Ii: Dynamics of Viscous Fluid Flow in Closed PipeDocument43 pagesFluid Mechanics Ii: Dynamics of Viscous Fluid Flow in Closed Pipeabdoageel456789No ratings yet
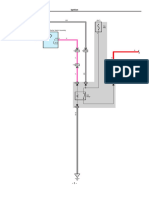
- F Electrical Wiring Diagram (System Circuits) : Power Source Rear Heater Rear HeaterDocument1 pageF Electrical Wiring Diagram (System Circuits) : Power Source Rear Heater Rear Heaterوليدمطهر الشجاع100% (1)
- Lecture 6 SolDocument59 pagesLecture 6 SolOsma UmrNo ratings yet
- Lewis and Buckingam EquationDocument13 pagesLewis and Buckingam EquationVishak ReguNo ratings yet
- ELEC 210 Exam Sheet PDFDocument7 pagesELEC 210 Exam Sheet PDFshafikatwiNo ratings yet
- 1 PDFDocument201 pages1 PDFMurali G SNo ratings yet
- Đánh L A ViosDocument3 pagesĐánh L A ViosChau Do TaiNo ratings yet
- Pages From SCI - P358 - Connection Details As Per EURO Code - NoRestrictionDocument7 pagesPages From SCI - P358 - Connection Details As Per EURO Code - NoRestrictionVijay Sai KNo ratings yet
- Chapter Four: Arresting Gear and BrakesDocument36 pagesChapter Four: Arresting Gear and Brakessamuel mech100% (2)
- 7 Segment Display Interfacing Using 8051mcDocument6 pages7 Segment Display Interfacing Using 8051mcdishantgoel2019No ratings yet
- General Mathematics Mock Board Exam Formula and Concept Use in 1Q 2015-2016 AlgebraDocument2 pagesGeneral Mathematics Mock Board Exam Formula and Concept Use in 1Q 2015-2016 AlgebraPatrick Antonio Orge ChingNo ratings yet
- BernoulliDocument12 pagesBernoullijegaNo ratings yet
- Rotational Motion - Miscellaneous SolutionsDocument16 pagesRotational Motion - Miscellaneous SolutionsJee AspirantNo ratings yet
- 03.1 Proračun Zid 1Document7 pages03.1 Proračun Zid 1Elmo TabakovićNo ratings yet
- Geometry Formulas Sheet: S W L A LW L HDocument1 pageGeometry Formulas Sheet: S W L A LW L HJohn Carlo SantosNo ratings yet
- AttachmentDocument29 pagesAttachmentfisahabirhane16No ratings yet
- Design and Experiment of A Permanent Magnet Tubular Linear Generator For Wave Energy Conversion SystemDocument9 pagesDesign and Experiment of A Permanent Magnet Tubular Linear Generator For Wave Energy Conversion SystemSushant ChhotrayNo ratings yet
- Inverted Tooth Chains Wippermann 20123 enDocument4 pagesInverted Tooth Chains Wippermann 20123 endba35074No ratings yet
- EJEMPLO 1. Determinar El Equivalente Thevenin y Norton Respecto A Los Terminales A Yb: I RDocument12 pagesEJEMPLO 1. Determinar El Equivalente Thevenin y Norton Respecto A Los Terminales A Yb: I RMrulrerNo ratings yet
- Gear 2Document4 pagesGear 2Omar KeshkNo ratings yet
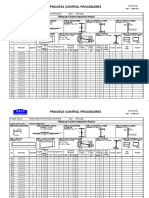
- Process Control Procedures: Fitting Up Section Inspection ReportDocument3 pagesProcess Control Procedures: Fitting Up Section Inspection ReportNguyễn Hoàng DũngNo ratings yet
- Lecture6-8 21012020 2Document55 pagesLecture6-8 21012020 2Parekh Prashil BhaveshbhaiNo ratings yet
- BINA 240 SQM GreenHouse Project-Model - PDF 6Document1 pageBINA 240 SQM GreenHouse Project-Model - PDF 6sahadul islamNo ratings yet
- 1026 CatalougeDocument63 pages1026 CatalougeShubh BhawsarNo ratings yet
- Tapered Roller Bearings, Single Row: Bearing Data Bearing InterfacesDocument4 pagesTapered Roller Bearings, Single Row: Bearing Data Bearing InterfacesShubh BhawsarNo ratings yet
- GRW Bearings CatalogDocument105 pagesGRW Bearings CatalogShubh BhawsarNo ratings yet
- Dimensions: Size Li - SsDocument3 pagesDimensions: Size Li - SsShubh BhawsarNo ratings yet
- Asean: Association of Southeast Asian NationsDocument13 pagesAsean: Association of Southeast Asian NationsAldred GomesNo ratings yet
- 1 s2.0 S0022169415000116 Main PDFDocument16 pages1 s2.0 S0022169415000116 Main PDFSubhra Sekhar MaityNo ratings yet
- B True My SoalDocument16 pagesB True My SoalArif FadliNo ratings yet
- ENG Yak40 ManualDocument57 pagesENG Yak40 ManualHồ Zy ĐanNo ratings yet
- Furse Datasheet Bimetallic Connectors DGT 281021Document2 pagesFurse Datasheet Bimetallic Connectors DGT 281021KhaledNo ratings yet
- Skeleton WorksheetDocument4 pagesSkeleton WorksheetNalendra UjiNo ratings yet
- Wheel of EvilDocument16 pagesWheel of EvilJoe Conaway100% (1)
- Chapter 50Document79 pagesChapter 50latrishahollmonNo ratings yet
- LabManual - Test and Reliability - v1 - 1Document28 pagesLabManual - Test and Reliability - v1 - 1Pedro Henrique KöhlerNo ratings yet
- JB083 I B11 P 05331Document24 pagesJB083 I B11 P 05331Melesio QuijadaNo ratings yet
- The Champion Legal Ads: 01-18-24Document50 pagesThe Champion Legal Ads: 01-18-24Donna S. SeayNo ratings yet
- Cells 08 00724Document13 pagesCells 08 00724meltwithsnow163.comNo ratings yet
- Cementing Through Coiled Tubing and Its InfluenceDocument13 pagesCementing Through Coiled Tubing and Its InfluenceAutumn Assirem TrefoilNo ratings yet
- 03 Neural Network Proxy Modeling of Complex Oil FedutenkoDocument38 pages03 Neural Network Proxy Modeling of Complex Oil Fedutenkobillal_m_aslamNo ratings yet
- TR RotjDocument4 pagesTR RotjDiana Gonzalez-Zuñiga TejadaNo ratings yet
- AP LAWCET 3 Years LLB 2015 Question Paper & Key PDFDocument1 pageAP LAWCET 3 Years LLB 2015 Question Paper & Key PDFpavaniNo ratings yet
- Mitigating Corrosion in Sweet GasDocument21 pagesMitigating Corrosion in Sweet Gaspunemusic8416No ratings yet
- Desquamative GingivitisDocument18 pagesDesquamative GingivitisSonia MehtaNo ratings yet
- Form 1 Diagnostic Test 2022Document7 pagesForm 1 Diagnostic Test 2022kellnerinerNo ratings yet
- High Voltage Engineering-IIDocument40 pagesHigh Voltage Engineering-IIAnikk DasNo ratings yet
- MPC Bible DemoDocument19 pagesMPC Bible DemoFERA CENTRALNo ratings yet
- DelhiNCR PDFDocument27 pagesDelhiNCR PDFBassam QureshiNo ratings yet
- Psychobiology of Altered States of Consciousness.: Psychological Bulletin February 2005Document31 pagesPsychobiology of Altered States of Consciousness.: Psychological Bulletin February 2005Mirco BarescoNo ratings yet
- Shock Pulse Measurement (Vibration Analysis) : Supplementary Operating ManualDocument8 pagesShock Pulse Measurement (Vibration Analysis) : Supplementary Operating ManualRajagopal SNo ratings yet
- Lec Framework Care of MotherDocument27 pagesLec Framework Care of MotherRica ParcasioNo ratings yet
- C673b ModLon II Instruction Sheet PDFDocument48 pagesC673b ModLon II Instruction Sheet PDFRobertNo ratings yet
- El Niño/La Niña-Southern Oscillation, or ENSO, Is A Quasi-Periodic Climate Pattern ThatDocument8 pagesEl Niño/La Niña-Southern Oscillation, or ENSO, Is A Quasi-Periodic Climate Pattern That9995246588No ratings yet
- KVI Group Organisation The Battery Intelligence Company PDFDocument51 pagesKVI Group Organisation The Battery Intelligence Company PDFabo100% (1)