You might also like
- Distributed Range-Based Relative Localization of Robot SwarmsDocument17 pagesDistributed Range-Based Relative Localization of Robot Swarmshbhbhb hbhbhbNo ratings yet
- ROS Navigation Concepts and TutorialDocument28 pagesROS Navigation Concepts and TutorialvipulNo ratings yet
- Electronically Driven Mobile PlatformDocument6 pagesElectronically Driven Mobile PlatformviduraNo ratings yet
- Mobile Robot Navigation using Wavefront Algorithm and Potential Field MethodDocument16 pagesMobile Robot Navigation using Wavefront Algorithm and Potential Field MethodM Taufik FirmansyahNo ratings yet
- Cui 2021 J. Phys. Conf. Ser. 1865 042068Document10 pagesCui 2021 J. Phys. Conf. Ser. 1865 042068mujahid naumanNo ratings yet
- FYP Review PaperDocument6 pagesFYP Review PaperMatthew MontebelloNo ratings yet
- Motion of Robots in A Non Rectangular Workspace: K Prasanna LakshmiDocument6 pagesMotion of Robots in A Non Rectangular Workspace: K Prasanna LakshmiInternational Journal of Engineering Inventions (IJEI)No ratings yet
- Localization and Mapping Aproximation For Autonomous Ground Platforms, Implementing SLAM AlgorithmsDocument5 pagesLocalization and Mapping Aproximation For Autonomous Ground Platforms, Implementing SLAM AlgorithmsIvan RodriguezNo ratings yet
- Performance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)Document8 pagesPerformance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)MahmoudAbdulGalilNo ratings yet
- 1I11-IJAET1111203 Novel 3dDocument12 pages1I11-IJAET1111203 Novel 3dIJAET JournalNo ratings yet
- Behavior Dynamics Based Motion Planning of Mobile Robots in Uncertain Dynamic EnvironmentsDocument25 pagesBehavior Dynamics Based Motion Planning of Mobile Robots in Uncertain Dynamic EnvironmentsAbd SalahNo ratings yet
- Modelling of Mobile Robot Dynamics: JANUARY 2010Document10 pagesModelling of Mobile Robot Dynamics: JANUARY 2010NguyễnĐạtNo ratings yet
- Entrenamiento de CarroDocument6 pagesEntrenamiento de CarroGerman CamposNo ratings yet
- Indoor Autonomous Robotic Navigation SystemDocument41 pagesIndoor Autonomous Robotic Navigation Systemmonica_804238794No ratings yet
- Research ProposalDocument5 pagesResearch ProposalHoang HuynhNo ratings yet
- Computers: State Estimation and Localization Based On Sensor Fusion For Autonomous Robots in Indoor EnvironmentDocument15 pagesComputers: State Estimation and Localization Based On Sensor Fusion For Autonomous Robots in Indoor EnvironmentsowNo ratings yet
- Robot SLAM: Build Maps and Track LocationDocument4 pagesRobot SLAM: Build Maps and Track Locationniranjan_187No ratings yet
- EKF SLAM Implementation for Visual Odometry DataDocument39 pagesEKF SLAM Implementation for Visual Odometry DataCristhian Aparcana RomanNo ratings yet
- A_critique_of_current_developments_in_simultaneousDocument13 pagesA_critique_of_current_developments_in_simultaneousbob wuNo ratings yet
- Modelling of Mobile Robot DynamicsDocument9 pagesModelling of Mobile Robot Dynamicskostya_4524No ratings yet
- Robot Localization Using Relative and Absolute Position EstimatesDocument7 pagesRobot Localization Using Relative and Absolute Position Estimatesengineer86No ratings yet
- Evaluating factorized ICP method for 3D mobile robot mappingDocument9 pagesEvaluating factorized ICP method for 3D mobile robot mappingIan MedeirosNo ratings yet
- Climbing Robots in Natural Terrain: KeywordsDocument8 pagesClimbing Robots in Natural Terrain: KeywordsNagesh BheemaNo ratings yet
- Full TextDocument2 pagesFull TextLaura Rua BassNo ratings yet
- A Review of Probabilistic Map Based TechniquesDocument9 pagesA Review of Probabilistic Map Based TechniquesNguyễn Trường GiangNo ratings yet
- AStar1Document11 pagesAStar1truhtNo ratings yet
- Robotics in UR Robots - March 2019Document55 pagesRobotics in UR Robots - March 2019김태환No ratings yet
- Circumventing Dynamic Modeling Evaluation of The Error-State PDFDocument8 pagesCircumventing Dynamic Modeling Evaluation of The Error-State PDFvaseem akramNo ratings yet
- Aau9354 SMDocument22 pagesAau9354 SMYilei zhangNo ratings yet
- Variable Formation Control of Multiple Robots Via VRC and Formation Switching To Accommodate Large Heading Changes by Leader RobotDocument12 pagesVariable Formation Control of Multiple Robots Via VRC and Formation Switching To Accommodate Large Heading Changes by Leader Robotkurts010No ratings yet
- An Experimental Study On Vision Based Controlling of A Spherical Rolling RobotDocument5 pagesAn Experimental Study On Vision Based Controlling of A Spherical Rolling RobotChristian MarpaungNo ratings yet
- Implementation of SLAM On Mobile Robots and Stitching of The Generated MapsDocument13 pagesImplementation of SLAM On Mobile Robots and Stitching of The Generated MapsTay LinNo ratings yet
- Dynamic Motion Planning For Mobile Robots Using Potential Field MethodDocument16 pagesDynamic Motion Planning For Mobile Robots Using Potential Field MethodAhmed Borhan El-HabroukNo ratings yet
- Different Kinematic Path Following Controllers For A Wheeled Mobile Robot of (2,0) TypeDocument18 pagesDifferent Kinematic Path Following Controllers For A Wheeled Mobile Robot of (2,0) TypemonikNo ratings yet
- Imtc RobotNavigation 7594Document5 pagesImtc RobotNavigation 7594flv_91No ratings yet
- 3D Surveillance Maps Using Monocular SLAMDocument7 pages3D Surveillance Maps Using Monocular SLAMAlexandreSidantNo ratings yet
- Thrun 2000 AI MagDocument20 pagesThrun 2000 AI MagedisonparedesrojasNo ratings yet
- Effect of Sensor and Actuator Quality On Robot Swarm Algorithm PerformanceDocument6 pagesEffect of Sensor and Actuator Quality On Robot Swarm Algorithm PerformanceRizkyRayzNo ratings yet
- Is Robotics Going Statistics? The Field of Probabilistic RoboticsDocument8 pagesIs Robotics Going Statistics? The Field of Probabilistic Roboticsrobo_c_programmer4515No ratings yet
- Wlding RobotDocument8 pagesWlding Robotameer hamzaNo ratings yet
- JYTHISEMINARDocument13 pagesJYTHISEMINARHima BindhuNo ratings yet
- AcfDocument5 pagesAcfShubhamNo ratings yet
- Jose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierDocument14 pagesJose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierSaimoon QuaziNo ratings yet
- Collision Avoidance of High-Speed Obstacles For Mobile Robots Via Maximum-Speed Aware Velocity Obstacle MethodDocument15 pagesCollision Avoidance of High-Speed Obstacles For Mobile Robots Via Maximum-Speed Aware Velocity Obstacle Methodabinaya_359109181No ratings yet
- Assessment Criteria For Mid-Term Assessment TEQIP-III Technology Robotics and AutomationDocument30 pagesAssessment Criteria For Mid-Term Assessment TEQIP-III Technology Robotics and Automationdjadja nakamayaNo ratings yet
- Multi-level Control for Multiple Mobile Robot SystDocument30 pagesMulti-level Control for Multiple Mobile Robot Systducdo dangNo ratings yet
- SM3075Document15 pagesSM3075eir235dNo ratings yet
- Cs7630 - Autonomous Robotics Final Project Report: Georgia Institute of Technology Spring 2008Document24 pagesCs7630 - Autonomous Robotics Final Project Report: Georgia Institute of Technology Spring 2008Intel KarthikNo ratings yet
- A Fully Autonomous Indoor Mobile Robot Using SLAM: June 2010Document7 pagesA Fully Autonomous Indoor Mobile Robot Using SLAM: June 2010huseyn haydarovNo ratings yet
- Robot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesDocument8 pagesRobot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesIulian AlexNo ratings yet
- Sensors: SLAM in Dynamic Environments: A Deep Learning Approach For Moving Object Tracking Using ML-RANSAC AlgorithmDocument20 pagesSensors: SLAM in Dynamic Environments: A Deep Learning Approach For Moving Object Tracking Using ML-RANSAC Algorithmdanilo17loNo ratings yet
- Multi-Robot Cooperative Localization Using Laser DataDocument11 pagesMulti-Robot Cooperative Localization Using Laser DataDilesh PradhanNo ratings yet
- Mobile Robot Navigation Using Visual OdometryDocument6 pagesMobile Robot Navigation Using Visual OdometryEbit Nur AlfianNo ratings yet
- ROS-based Mapping, Localization and Autonomous Navigation Using A Pioneer 3-DX Robot and Their Relevant IssuesDocument5 pagesROS-based Mapping, Localization and Autonomous Navigation Using A Pioneer 3-DX Robot and Their Relevant Issuesbootscats100% (1)
- D6Document7 pagesD6Vishal ShuklaNo ratings yet
- A Method of Indoor Mobile Robot Navigation by Using ControlDocument6 pagesA Method of Indoor Mobile Robot Navigation by Using ControlengrodeNo ratings yet
- An Occupancy Grid Based SLAM Method: Ozan Özışık, Sırma YavuzDocument3 pagesAn Occupancy Grid Based SLAM Method: Ozan Özışık, Sırma Yavuzdogukan duranNo ratings yet
- V-SLAM: Vision-Based Simultaneous Localization and Map Building For An Autonomous Mobile RobotDocument6 pagesV-SLAM: Vision-Based Simultaneous Localization and Map Building For An Autonomous Mobile Robotfrancesco vultaggioNo ratings yet
- Exact Cell Decomposition of Arrangements Used For Path Planning in RoboticsDocument14 pagesExact Cell Decomposition of Arrangements Used For Path Planning in RoboticsAli BabarNo ratings yet
- READING 3 NAT SEC Seeking Shelter For Journalism, Not JournalistsDocument3 pagesREADING 3 NAT SEC Seeking Shelter For Journalism, Not JournalistsJeff AtuaNo ratings yet
- READING 2 FOI Knockbacks On FOI Reveal Wall of Government SecrecyDocument3 pagesREADING 2 FOI Knockbacks On FOI Reveal Wall of Government SecrecyJeff AtuaNo ratings yet
- Privacy Reading 2 Harrison DeathknocksDocument6 pagesPrivacy Reading 2 Harrison DeathknocksJeff AtuaNo ratings yet
- READING 2 NATIONAL SECURITY National Security Laws Impeding Journalism - The Saturday PaperDocument5 pagesREADING 2 NATIONAL SECURITY National Security Laws Impeding Journalism - The Saturday PaperJeff AtuaNo ratings yet
- READING 2 WB Australia's Whistleblower Laws Are 'Impenetrable', Federal Court Judge Says - ABC NewsDocument9 pagesREADING 2 WB Australia's Whistleblower Laws Are 'Impenetrable', Federal Court Judge Says - ABC NewsJeff AtuaNo ratings yet
- Reading 3 WB McbrideDocument4 pagesReading 3 WB McbrideJeff AtuaNo ratings yet
- Reaction Paper On Hardball SynopsisDocument2 pagesReaction Paper On Hardball SynopsisJeff AtuaNo ratings yet
- Biometrics Technology: Student's Name Institution Affiliation Course Details Tutor's Name Due DateDocument5 pagesBiometrics Technology: Student's Name Institution Affiliation Course Details Tutor's Name Due DateJeff AtuaNo ratings yet
- Abc Launches Securedrop For Whistleblowers To Securely and Anonymously Contact JournalistsDocument3 pagesAbc Launches Securedrop For Whistleblowers To Securely and Anonymously Contact JournalistsJeff AtuaNo ratings yet
- READING 4 Geoffrey Rush Appeal - Daily Telegraph Loses Appeal Against Defamation DecisionDocument2 pagesREADING 4 Geoffrey Rush Appeal - Daily Telegraph Loses Appeal Against Defamation DecisionJeff AtuaNo ratings yet
- KNEC 2022 DTE Exam TimetableDocument4 pagesKNEC 2022 DTE Exam TimetableJeff AtuaNo ratings yet
- Effects of Covid2Document1 pageEffects of Covid2Jeff AtuaNo ratings yet
- Impacts of Rural-Urban Migration On Health: Student's Name Institution Affiliation Course Details Professor Name DateDocument3 pagesImpacts of Rural-Urban Migration On Health: Student's Name Institution Affiliation Course Details Professor Name DateJeff AtuaNo ratings yet
- Case Study-Nutrition - EditedDocument3 pagesCase Study-Nutrition - EditedJeff AtuaNo ratings yet
- Comparison of Auto-Motive Companies: Surname 1Document12 pagesComparison of Auto-Motive Companies: Surname 1Jeff AtuaNo ratings yet
- Stella Artois in South Africa Case: Student's Name Institution Affiliation Course Details Tutor's Name DateDocument4 pagesStella Artois in South Africa Case: Student's Name Institution Affiliation Course Details Tutor's Name DateJeff AtuaNo ratings yet
- Author: Terryoprah Mageto TEL NO: 0711153700Document3 pagesAuthor: Terryoprah Mageto TEL NO: 0711153700Jeff AtuaNo ratings yet
- Document HappieDocument2 pagesDocument HappieJeff AtuaNo ratings yet
- Financial Ratio Analysis ReportDocument8 pagesFinancial Ratio Analysis ReportJeff AtuaNo ratings yet
- Student Name Course Details Tutor's Name Institution Details Due DateDocument5 pagesStudent Name Course Details Tutor's Name Institution Details Due DateJeff AtuaNo ratings yet
- Emotional Intelligence Article EditedDocument3 pagesEmotional Intelligence Article EditedJeff AtuaNo ratings yet
- 7 - Analysis of Cables and ArchesDocument4 pages7 - Analysis of Cables and ArchesFrancis Ko Badongen-Cawi Tabaniag Jr.No ratings yet
- Tugas ATK Hal 56 Dan 59 HIMMELBLAUDocument2 pagesTugas ATK Hal 56 Dan 59 HIMMELBLAUSafefire100% (1)
- Choudhary Coaching Classes and Counselling Centre: A (X R: 1 X 1) B C (X R: X 0) SDocument5 pagesChoudhary Coaching Classes and Counselling Centre: A (X R: 1 X 1) B C (X R: X 0) STrupti JadhaoNo ratings yet
- P008 Delgadillo FinalPaper SimultaneousPressureLevelControlDeaeratorDocument12 pagesP008 Delgadillo FinalPaper SimultaneousPressureLevelControlDeaeratorIgnacio RamirezNo ratings yet
- SmithMinton Calculus ET 5e C01 S01Document12 pagesSmithMinton Calculus ET 5e C01 S01maged wagehNo ratings yet
- 8 Ikizler LightingDocument299 pages8 Ikizler LightingArvin GuerreroNo ratings yet
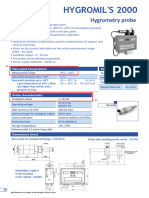
- En Hygromil'sDocument1 pageEn Hygromil'sYersson MesiasNo ratings yet
- Cheung Chuk Shan College: MATHEMATICS Compulsory Part Paper 1 Question-Answer BookDocument24 pagesCheung Chuk Shan College: MATHEMATICS Compulsory Part Paper 1 Question-Answer Book曾建元No ratings yet
- Dys NotesDocument4 pagesDys NotesANIKET AWASTHI ITNo ratings yet
- AS-Unit-8-On-the-Move-Exam-AnswersDocument31 pagesAS-Unit-8-On-the-Move-Exam-Answersastr0pay7No ratings yet
- The Vapor Pressure and Enthalpy of WaterDocument13 pagesThe Vapor Pressure and Enthalpy of WaterJoseph GulerNo ratings yet
- Materials 14 075402Document20 pagesMaterials 14 075402sahib mohammadNo ratings yet
- Seismic - Shear WallsDocument13 pagesSeismic - Shear WallsVasil GeorgievNo ratings yet
- Crux Implant Removal Command - Ascension GlossaryDocument2 pagesCrux Implant Removal Command - Ascension GlossarydanielaNo ratings yet
- BALANCING ROTOR WITH SOUND SIGNALDocument8 pagesBALANCING ROTOR WITH SOUND SIGNALYulian FirdausNo ratings yet
- Applied Mechanics BCE I/II Static Equilibrium ConceptsDocument18 pagesApplied Mechanics BCE I/II Static Equilibrium ConceptsBijay RayamajhiNo ratings yet
- Complec Vector Spaces - LarsonDocument42 pagesComplec Vector Spaces - LarsonAgung ManaluNo ratings yet
- Kertas 2 Pep Akhir Tahun Ting 4 Terengganu 2011Document12 pagesKertas 2 Pep Akhir Tahun Ting 4 Terengganu 2011Muhamad FarisNo ratings yet
- Fluid MechanicsDocument27 pagesFluid MechanicsKarl Radison AbreaNo ratings yet
- Tolon Brochure 2014-EnDocument16 pagesTolon Brochure 2014-Encouemba18th batchNo ratings yet
- Curriculum Guide in Science Grade X S.Y. 2020-2021: St. Scholastica'S Academy Tabunok, Talisay City, CebuDocument15 pagesCurriculum Guide in Science Grade X S.Y. 2020-2021: St. Scholastica'S Academy Tabunok, Talisay City, CebuWarley JabelNo ratings yet
- Math 2260 Written HW #3 SolutionsDocument4 pagesMath 2260 Written HW #3 SolutionsSan RiaNo ratings yet
- PV Modelling CourseworkDocument14 pagesPV Modelling Courseworkoopeoluwa_1No ratings yet
- 1977 - Patankar - Journal of Heat Transfer - Periodic Flow in DuctsDocument7 pages1977 - Patankar - Journal of Heat Transfer - Periodic Flow in Ductsarif aktaşNo ratings yet
- Lesson 13-The Solar System 1 - Outer Planets 2Document19 pagesLesson 13-The Solar System 1 - Outer Planets 2Kate Ngọc DiệpNo ratings yet
- FRQ Review 2 - W - Teacher NotesDocument5 pagesFRQ Review 2 - W - Teacher NotesNoor FarhanNo ratings yet
- Structural Balancing of Kohat Basin by Ahsan GardeziDocument22 pagesStructural Balancing of Kohat Basin by Ahsan GardeziAsad JahangirNo ratings yet
- Unit 5 - Momentum and Impulse QuizDocument5 pagesUnit 5 - Momentum and Impulse QuizJessica HainesNo ratings yet
- Indexer Cam Gear Kurvengetriebe HSG BWV - HEINZDocument20 pagesIndexer Cam Gear Kurvengetriebe HSG BWV - HEINZluiz cláudioNo ratings yet
- Chapter 4: AC Network Analysis Instructor NotesDocument60 pagesChapter 4: AC Network Analysis Instructor Notessong100% (1)