You might also like
- DC Motor and Generator TheoryDocument51 pagesDC Motor and Generator TheoryInterogator5No ratings yet
- Sub Module 3.17 AC GENDocument24 pagesSub Module 3.17 AC GENInterogator5No ratings yet
- Learn about AC motors used in aerospace with this guideDocument16 pagesLearn about AC motors used in aerospace with this guide4587560No ratings yet
- Module 3.17 B1B2 Rev 01Document26 pagesModule 3.17 B1B2 Rev 01Ahmed Aman IbrahimNo ratings yet
- Sub Module 3.15 TransformersDocument23 pagesSub Module 3.15 TransformersInterogator5No ratings yet
- PTC Guide to Electrical TerminologyDocument20 pagesPTC Guide to Electrical TerminologyInterogator5No ratings yet
- Dunki Jacobs1981Document8 pagesDunki Jacobs1981renegadeNo ratings yet
- Sub Module 3.11 Inductance FinalDocument17 pagesSub Module 3.11 Inductance FinalInterogator5No ratings yet
- Proceedings of NCPCE-9Document18 pagesProceedings of NCPCE-9Anoop MathewNo ratings yet
- Sub Module 3.9 Capacitance FinalDocument26 pagesSub Module 3.9 Capacitance FinalInterogator5No ratings yet
- Sub Module 3.13 AC THEORYDocument26 pagesSub Module 3.13 AC THEORYInterogator5No ratings yet
- EASA Mod 3 BK 4 Ac & DC Mech PDFDocument76 pagesEASA Mod 3 BK 4 Ac & DC Mech PDFNavaraj BaniyaNo ratings yet
- 10 1 1 1034 5168 PDFDocument6 pages10 1 1 1034 5168 PDFRosa Elvira Montalvo MartínezNo ratings yet
- HighStepupDC DCConverterFehotovoltaicSystemDocument9 pagesHighStepupDC DCConverterFehotovoltaicSystemSadeqNo ratings yet
- Geometrical and Magnetic Neutral AxisDocument11 pagesGeometrical and Magnetic Neutral AxisRahman SatarNo ratings yet
- Realization of Collaboration Compensation Strategy of Railway Power Conditioner For A High-Speed Railway Traction With PV SourceDocument6 pagesRealization of Collaboration Compensation Strategy of Railway Power Conditioner For A High-Speed Railway Traction With PV Sourcebharath_eeeNo ratings yet
- COMPARATIVE ANALYSIS OF PMSM and BLDC MOTORS FOR EV AND HEV APPLICATIONSDocument5 pagesCOMPARATIVE ANALYSIS OF PMSM and BLDC MOTORS FOR EV AND HEV APPLICATIONSsachin kumarNo ratings yet
- Circuit Simulation of A BLDC MotorDocument4 pagesCircuit Simulation of A BLDC MotorjpmacabascoNo ratings yet
- Simulation and Analysis of A Gas Insulated Switchg PDFDocument7 pagesSimulation and Analysis of A Gas Insulated Switchg PDFlukiNo ratings yet
- Harmonic Analysis of SVPWM Based Three Phase Inverter Using MATLAB SimulinkDocument6 pagesHarmonic Analysis of SVPWM Based Three Phase Inverter Using MATLAB SimulinkEditor IJTSRDNo ratings yet
- Bridgeless Flyback Converter For Low PowerDocument6 pagesBridgeless Flyback Converter For Low PowerArceu CamposNo ratings yet
- 3.chapter Three-Starting System 1Document21 pages3.chapter Three-Starting System 1Ahmed M MerzaNo ratings yet
- Single Phase Induction Motor: A Synopsis Report OnDocument8 pagesSingle Phase Induction Motor: A Synopsis Report OnAlexander DejesusNo ratings yet
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocument6 pagesFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNo ratings yet
- Islamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Document1 pageIslamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Ashik AhmedNo ratings yet
- EC - Unit 2 - Transistor BiasingDocument19 pagesEC - Unit 2 - Transistor Biasingnanobala15No ratings yet
- Jeas 1012 796Document8 pagesJeas 1012 796Victor FurmanNo ratings yet
- Design of EV Charger With Cuk Converter To Improve Power QualityDocument5 pagesDesign of EV Charger With Cuk Converter To Improve Power QualitydikochchNo ratings yet
- Distrubution of PowerDocument175 pagesDistrubution of PowerMuhammadMunirMalikNo ratings yet
- Dual Three-Phase Indirect Matrix Converter With Carrier-Based PWM MethodDocument13 pagesDual Three-Phase Indirect Matrix Converter With Carrier-Based PWM Methodsrinu247No ratings yet
- Solar PV PlantDocument9 pagesSolar PV PlantPrashant TrivediNo ratings yet
- Modified Single Stage AC-AC Converter: International Journal of Power Electronics and Drive System (IJPEDS)Document9 pagesModified Single Stage AC-AC Converter: International Journal of Power Electronics and Drive System (IJPEDS)shivaramakrishnaNo ratings yet
- Design and Control Methods of PFC in OnbDocument10 pagesDesign and Control Methods of PFC in OnbannaNo ratings yet
- Power ConverterDocument9 pagesPower ConverterSrini VasuluNo ratings yet
- Development of Electromotive ForceDocument5 pagesDevelopment of Electromotive ForcesmhbNo ratings yet
- Power Systems RepresentationDocument23 pagesPower Systems RepresentationEnyewNo ratings yet
- A Novel Control Strategy of Indirect Matrix ConverDocument10 pagesA Novel Control Strategy of Indirect Matrix Convermạnh phanNo ratings yet
- Exam... Electrical Machnes-IDocument31 pagesExam... Electrical Machnes-Icharlesc5746No ratings yet
- Power AmplifierDocument17 pagesPower AmplifierAkinola AyomideNo ratings yet
- IES OBJ Electrical Engineering 1998 Paper IIDocument15 pagesIES OBJ Electrical Engineering 1998 Paper IIMoHsin KhNo ratings yet
- Session 9 MADocument55 pagesSession 9 MAUmesh PatilNo ratings yet
- Assignment 5 Sir TubanDocument16 pagesAssignment 5 Sir TubanVincoy JohnlloydNo ratings yet
- Light Tracking Servo System: Projects For StudentsDocument13 pagesLight Tracking Servo System: Projects For StudentssirfabdulNo ratings yet
- 2012 Comparative Evaluation of MC and Voltage DC-Link Back-To-Back Converter SystemsDocument24 pages2012 Comparative Evaluation of MC and Voltage DC-Link Back-To-Back Converter SystemsTran Quoc HoanNo ratings yet
- Power System Analysis Exam QuestionsDocument8 pagesPower System Analysis Exam Questionsgiri manoj sai ram chilukuriNo ratings yet
- Active Power Losses Distribution Methods For The Modular Multilevel ConverterDocument6 pagesActive Power Losses Distribution Methods For The Modular Multilevel ConverterNAM PHẠM LÊNo ratings yet
- Module-1 BJT Biasing and Small Signal Operation and Models NotesDocument24 pagesModule-1 BJT Biasing and Small Signal Operation and Models NotesNisha Kotyan G RNo ratings yet
- Journal Jpe 18-3 249301697Document8 pagesJournal Jpe 18-3 249301697Carlos DPNo ratings yet
- DC Machine L02Document12 pagesDC Machine L02luckyNo ratings yet
- Journal Pre-Proof: Microprocessors and MicrosystemsDocument19 pagesJournal Pre-Proof: Microprocessors and MicrosystemsGOBINATH KNo ratings yet
- WWW - Manaresults.Co - In: Power System AnalysisDocument8 pagesWWW - Manaresults.Co - In: Power System Analysisajay malothNo ratings yet
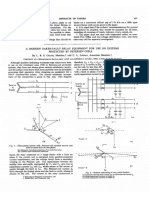
- A Modern Earth-Fault Relay Equipment For Use On Systems Protected by Petersen Coils by L. B. S. Member, and C. L. Associate Member.fDocument2 pagesA Modern Earth-Fault Relay Equipment For Use On Systems Protected by Petersen Coils by L. B. S. Member, and C. L. Associate Member.fjuljan sinaniNo ratings yet
- Power System Previous Question PDFDocument3 pagesPower System Previous Question PDFBijoy ChowdhuryNo ratings yet
- Investigating Switching TransformersDocument15 pagesInvestigating Switching TransformersMuhamad Afkar GumintangNo ratings yet
- Tom Tat Luan An - Tieng Anh - V1Document32 pagesTom Tat Luan An - Tieng Anh - V1Hua Tran Phuong ThaoNo ratings yet
- 305-149767815014-19Document6 pages305-149767815014-19adane gashuNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Module 4: Electronic Fundamentals: PIA Training Centre (PTC)Document48 pagesModule 4: Electronic Fundamentals: PIA Training Centre (PTC)KHAN SIDDIQUENo ratings yet
- Module 9 (Human Factors) Sub Module 9.5 (Physical EnvironmeDocument13 pagesModule 9 (Human Factors) Sub Module 9.5 (Physical EnvironmeInterogator5No ratings yet
- Module 9 (Human Factors) Sub Module 9.3 (Social Psychology)Document20 pagesModule 9 (Human Factors) Sub Module 9.3 (Social Psychology)Interogator5No ratings yet
- Module 9 (Human Factors) Sub Module 9.7 (Communication) - RevDocument13 pagesModule 9 (Human Factors) Sub Module 9.7 (Communication) - RevInterogator5No ratings yet
- Module 9 (Human Factors) Sub Module 9.2 (Human PerformanceDocument25 pagesModule 9 (Human Factors) Sub Module 9.2 (Human PerformanceInterogator5No ratings yet
- PTC Wave Motion and SoundDocument17 pagesPTC Wave Motion and SoundInterogator5No ratings yet
- PIA Training Module on Basic AerodynamicsDocument25 pagesPIA Training Module on Basic AerodynamicsAhsan Malik100% (1)
- Module 9 (Human Factors) Sub Module 9.1 (INTRODUCTION TO HUDocument24 pagesModule 9 (Human Factors) Sub Module 9.1 (INTRODUCTION TO HUInterogator5No ratings yet
- PIA B - Basic - Module 1.1 (MATHS) Arithmetic FinalDocument49 pagesPIA B - Basic - Module 1.1 (MATHS) Arithmetic Finalfaizan masoodNo ratings yet
- PTC Mechanics Module 2.2Document79 pagesPTC Mechanics Module 2.2Interogator5No ratings yet
- PIA B1.1 - Module 2 (PHYSICS) SubModule 2.4 (Optics) FinalDocument25 pagesPIA B1.1 - Module 2 (PHYSICS) SubModule 2.4 (Optics) FinalInterogator5No ratings yet
- PIA B2 - Module 2 (PHYSICS) SubModule 2.3 (Thermodynamics) FiDocument36 pagesPIA B2 - Module 2 (PHYSICS) SubModule 2.3 (Thermodynamics) FiInterogator5No ratings yet
- PIA B2 - Module 2 (PHYSICS) SubModule 2.2 (Mechanics) FinalDocument57 pagesPIA B2 - Module 2 (PHYSICS) SubModule 2.2 (Mechanics) FinalInterogator5No ratings yet
- PIA B2 - Module 2 (PHYSICS) SubModule 2.1 (Matter) FinalDocument20 pagesPIA B2 - Module 2 (PHYSICS) SubModule 2.1 (Matter) FinalInterogator5No ratings yet
- PIA B1.1 - Module 2 (PHYSICS) SubModule 2.4 (Optics) FinalDocument25 pagesPIA B1.1 - Module 2 (PHYSICS) SubModule 2.4 (Optics) FinalInterogator5No ratings yet
- PTC Wave Motion and SoundDocument17 pagesPTC Wave Motion and SoundInterogator5No ratings yet
- PTC Thermodynamics ModuleDocument37 pagesPTC Thermodynamics ModuleInterogator5No ratings yet
- Magnetism FundamentalsDocument20 pagesMagnetism FundamentalsInterogator5No ratings yet
- PTC PHYSICS MODULE 2 SUB-MODULESDocument20 pagesPTC PHYSICS MODULE 2 SUB-MODULESInterogator5No ratings yet
- Sub Module 3.16 FiltersDocument16 pagesSub Module 3.16 FiltersInterogator5No ratings yet
- Sub Module 3.11 Inductance FinalDocument17 pagesSub Module 3.11 Inductance FinalInterogator5No ratings yet
- Sub Module 3.13 AC THEORYDocument26 pagesSub Module 3.13 AC THEORYInterogator5No ratings yet
- Sub Module 3.9 Capacitance FinalDocument26 pagesSub Module 3.9 Capacitance FinalInterogator5No ratings yet
- Sub Module 3.8 Power FinalDocument9 pagesSub Module 3.8 Power FinalInterogator5No ratings yet
- Sub Module 3.7 (Resistance) Final2Document19 pagesSub Module 3.7 (Resistance) Final2Interogator5No ratings yet
- Generation of Electricity MethodsDocument8 pagesGeneration of Electricity MethodsInterogator5No ratings yet
- Cee 104 - Ulo 1Document33 pagesCee 104 - Ulo 1Kenneth Dave BonggolNo ratings yet
- ISC Series: Signal ConvertersDocument8 pagesISC Series: Signal ConvertersMohammad HosseinNo ratings yet
- Electromagnetic Relays Explained (K2Document30 pagesElectromagnetic Relays Explained (K2Vairaperumal KNo ratings yet
- EQUATIONS OF MOTION FOR STRUCTURES IN TERMS OF QUASICOORDINATESDocument17 pagesEQUATIONS OF MOTION FOR STRUCTURES IN TERMS OF QUASICOORDINATESVitor FinottoNo ratings yet
- Apx1000-2000-4000 Service Manual 68012004061 f-6Document100 pagesApx1000-2000-4000 Service Manual 68012004061 f-6buenodrNo ratings yet
- EasyPact CVS - LV525302Document6 pagesEasyPact CVS - LV525302Andresito DonosoNo ratings yet
- 22201B PDFDocument28 pages22201B PDFSanchez Resendiz BonifacioNo ratings yet
- MS IB Physics SL Summative Test Topics A. (1,2,3) and D.1Document34 pagesMS IB Physics SL Summative Test Topics A. (1,2,3) and D.1gvicentiniNo ratings yet
- Design of Wound Rotor Low-Voltage Synchronous Generator: M. Osovi, S. Smaka, Š. Maši I. Salihbegovi H. SteinhartDocument5 pagesDesign of Wound Rotor Low-Voltage Synchronous Generator: M. Osovi, S. Smaka, Š. Maši I. Salihbegovi H. SteinhartMurat Erhan BalciNo ratings yet
- Final Practice ProblemsDocument43 pagesFinal Practice Problemsichsan benhardNo ratings yet
- Module 2 Physics Page MechanicsDocument10 pagesModule 2 Physics Page MechanicsElvis MbamaraNo ratings yet
- Modified BitumensDocument6 pagesModified BitumensDonNo ratings yet
- NCERT Solutions For Class 12 Physics Chapter 10 Wave OpticsDocument13 pagesNCERT Solutions For Class 12 Physics Chapter 10 Wave OpticsDisney DoreamonNo ratings yet
- Dominique and Janiga Fluid DynamicsDocument232 pagesDominique and Janiga Fluid DynamicsSergio BrigadaNo ratings yet
- Thermal Laboratory - Lab Experiment-1Document7 pagesThermal Laboratory - Lab Experiment-1Raj PratyushNo ratings yet
- Perkins UkDocument30 pagesPerkins UkAhmad RiyantoNo ratings yet
- Ic Op-Amp Ha 17741Document19 pagesIc Op-Amp Ha 17741evhyajahNo ratings yet
- Fluid - Mechanics Kundu 2012 5th PDFDocument3 pagesFluid - Mechanics Kundu 2012 5th PDFSergioNo ratings yet
- Screenshot 2021-02-04 at 21.37.09Document3 pagesScreenshot 2021-02-04 at 21.37.09DoriNo ratings yet
- Modeling Tuned Mass Dampers (TMD) in Autodesk Robot Structural Analysis Professional Description of ExampleDocument1 pageModeling Tuned Mass Dampers (TMD) in Autodesk Robot Structural Analysis Professional Description of ExampleJillian Howard0% (1)
- Wind Powerplant and Powerplant EconomicsDocument70 pagesWind Powerplant and Powerplant EconomicsVincentNo ratings yet
- Building and Environment: Mosha Zhao, Schew-Ram Mehra, Hartwig M. KünzelDocument16 pagesBuilding and Environment: Mosha Zhao, Schew-Ram Mehra, Hartwig M. KünzelAsmita ManharNo ratings yet
- 12 Chapter2Document24 pages12 Chapter2Fela Nicholas AdekunleNo ratings yet
- Fundamentals of Electrical Power Systems - A Primer With Matlab (Samir Ibrahim AboodDocument510 pagesFundamentals of Electrical Power Systems - A Primer With Matlab (Samir Ibrahim AboodCarlos Aguilar100% (1)
- Model Question Paper-EMDocument4 pagesModel Question Paper-EMAgnes RituNo ratings yet
- Journal Article Explores Effects of Frequency, Duty Cycle on Plasma Actuator FlowDocument13 pagesJournal Article Explores Effects of Frequency, Duty Cycle on Plasma Actuator FlowAnonymous SlyvspdBNo ratings yet
- Pdu Lab Manual 104Document94 pagesPdu Lab Manual 104Rana FaizanNo ratings yet
- Overview of Kseb: GenerationDocument57 pagesOverview of Kseb: GenerationAswin LalNo ratings yet
- The RMS Voltage of An AC WaveformDocument4 pagesThe RMS Voltage of An AC WaveformXhaNo ratings yet
- Insulation Thickness Calculation for Steam PipesDocument29 pagesInsulation Thickness Calculation for Steam Pipesrajachem100% (2)