You might also like
- TRYGONOMETRIA - Zadania MaturalneDocument9 pagesTRYGONOMETRIA - Zadania MaturalneMarta KramerNo ratings yet
- Materiały Pomocnicze - Nośność Na Zginanie BETONY1Document27 pagesMateriały Pomocnicze - Nośność Na Zginanie BETONY1piotrekNo ratings yet
- 03 - Ugięcie - Metoda Dokładna - Przykład PDFDocument5 pages03 - Ugięcie - Metoda Dokładna - Przykład PDFIgor PeregudNo ratings yet
- Oddziaływanie Wiatru Na Przęsło - Metoda - Uproszczona - Przęsło - ObciążoneDocument5 pagesOddziaływanie Wiatru Na Przęsło - Metoda - Uproszczona - Przęsło - ObciążoneDariusz SobalaNo ratings yet
- Rozdzial Poprzeczny Obciazen - W Mostach WielobelkowychDocument39 pagesRozdzial Poprzeczny Obciazen - W Mostach Wielobelkowychtomek100% (1)
- WYKŁAD NR 3 - Ustroje Płytowo-Słupowe, Kształtowanie ModelowanieDocument15 pagesWYKŁAD NR 3 - Ustroje Płytowo-Słupowe, Kształtowanie ModelowanieMonika Hajda-BaluśNo ratings yet
- Stal Sprężająca, Typy I Rodzaje Cięgien SprężającychDocument22 pagesStal Sprężająca, Typy I Rodzaje Cięgien Sprężającychrleszka100% (1)
- Ćwiczenia Z Konstrukcji Betonowych - Założenia Analizy I Obliczeń Przekrojów ŻelbetowychDocument4 pagesĆwiczenia Z Konstrukcji Betonowych - Założenia Analizy I Obliczeń Przekrojów Żelbetowychadanedhel89No ratings yet
- WYKŁAD NR 1 - Słupy ŻelbetoweDocument19 pagesWYKŁAD NR 1 - Słupy ŻelbetoweMonika Hajda-BaluśNo ratings yet
- Tablice Winklera 2 PrzeslaDocument4 pagesTablice Winklera 2 PrzeslaPiotr Zieliński0% (1)
- Opracowanie Egzamin BetonyDocument27 pagesOpracowanie Egzamin BetonynetkasiaNo ratings yet
- Żelbet - Made by Ula Opracowania Na EgzDocument17 pagesŻelbet - Made by Ula Opracowania Na EgzLenny ValentinoNo ratings yet
- Przyklad 4 Slup Dwukierunkowo SciskanyDocument7 pagesPrzyklad 4 Slup Dwukierunkowo SciskanyRadXz0rNo ratings yet
- Obliczenia Konstrukcji Żelbetowych - PodstawyDocument8 pagesObliczenia Konstrukcji Żelbetowych - PodstawystudentpkNo ratings yet
- Konstrukcje SprężoneDocument8 pagesKonstrukcje SprężoneWeronikaNo ratings yet
- BetonDocument54 pagesBetonsylwia dNo ratings yet
- Efekty II-go RzęduDocument6 pagesEfekty II-go RzęduIgor PeregudNo ratings yet
- Obliczenia - StropyDocument6 pagesObliczenia - StropyJessie DavisNo ratings yet
- Projekt Przykładowy Od Katedry GeotechnikiDocument14 pagesProjekt Przykładowy Od Katedry GeotechnikiSebastian LipińskiNo ratings yet
- Projektowanie Mostów Według EurokodówDocument9 pagesProjektowanie Mostów Według EurokodówMarekNo ratings yet
- Betony Sem6 Wyklady (All in One)Document122 pagesBetony Sem6 Wyklady (All in One)pissvvNo ratings yet
- Konstrukcje Betonowe - Hala Żelbetowa 2Document28 pagesKonstrukcje Betonowe - Hala Żelbetowa 2Grzesiek DrewniakNo ratings yet
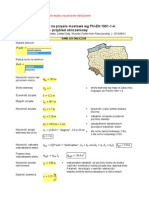
- Obciazenie Wiatrem WG Pn-En 1991-1-4Document6 pagesObciazenie Wiatrem WG Pn-En 1991-1-4RobertNo ratings yet
- Słupy UzwojoneDocument19 pagesSłupy UzwojoneDaniel KwiatkowskiNo ratings yet
- Mosty Obliczenia Wstepne Dzwigara Glownego V2015Document25 pagesMosty Obliczenia Wstepne Dzwigara Glownego V2015tomekNo ratings yet
- ProjektDocument64 pagesProjektKonradNo ratings yet
- SuwnicaDocument36 pagesSuwnicaMateusz CioćNo ratings yet
- Hala Z TransportemDocument58 pagesHala Z TransportemKasia Sawicka100% (1)
- Cwicz Mechanika Budowli Obliczanie Ukladow Statycznie Niewyznaczalnych Metoda Sil RamaDocument17 pagesCwicz Mechanika Budowli Obliczanie Ukladow Statycznie Niewyznaczalnych Metoda Sil RamarleszkaNo ratings yet
- Algorytmy PrzebicieDocument18 pagesAlgorytmy PrzebicieMikołaj WichrykNo ratings yet
- Przykład Obliczeń Nośności Pali Vibro WG PN-83 - B-02482Document2 pagesPrzykład Obliczeń Nośności Pali Vibro WG PN-83 - B-02482rleszkaNo ratings yet
- M.Blockus-Analiza Pracy Pali W Podłozu Grunt Na Podst Bad Dyn - Rozdz1Document27 pagesM.Blockus-Analiza Pracy Pali W Podłozu Grunt Na Podst Bad Dyn - Rozdz1rleszkaNo ratings yet
- 2013-4 278-286 KrasinskiDocument9 pages2013-4 278-286 KrasinskiPiotr ZielińskiNo ratings yet
- Hala Żelbetowa - Modelowanie W Programie ROBOT - (BudownictwoPolskie - PL)Document22 pagesHala Żelbetowa - Modelowanie W Programie ROBOT - (BudownictwoPolskie - PL)Anna GNo ratings yet
- PN-99 - B-02361 Pochylenie Połaci DachowychDocument7 pagesPN-99 - B-02361 Pochylenie Połaci DachowychgufajejamiNo ratings yet
- Ustroje Płytowo - SłupoweDocument71 pagesUstroje Płytowo - SłupoweGrzegorz TomkówNo ratings yet
- WYKŁAD NR 4 - PrzebicieDocument17 pagesWYKŁAD NR 4 - PrzebicieMonika Hajda-BaluśNo ratings yet
- Projekt 5 Strop Krzyżowo Zbrojony Guide cz.2Document12 pagesProjekt 5 Strop Krzyżowo Zbrojony Guide cz.2Michał ŚwiątekNo ratings yet
- Oddziaływanie Wiatru Na Przęsło - Metoda - Uproszczona - Przęsło - NieobciążoneDocument5 pagesOddziaływanie Wiatru Na Przęsło - Metoda - Uproszczona - Przęsło - NieobciążoneDariusz Sobala100% (1)
- Belki GerberaDocument8 pagesBelki GerberaMarcin StępieńNo ratings yet
- Grochowska Konstrukcje 9 2014 PDFDocument5 pagesGrochowska Konstrukcje 9 2014 PDFP KowalskiNo ratings yet
- EUROKODY Projektowanie Konstrukcji Z BetonuDocument20 pagesEUROKODY Projektowanie Konstrukcji Z BetonuIzabela Kazimierczuk100% (1)
- Most Płytowy - ObliczeniaDocument6 pagesMost Płytowy - Obliczenianem124100% (1)
- Projekt Hali Z Suwnicą - Na Starych NormachDocument45 pagesProjekt Hali Z Suwnicą - Na Starych NormachGrzesiek DrewniakNo ratings yet
- Fundament yDocument20 pagesFundament yPiotr ZielińskiNo ratings yet
- Projektowanie Mostów WG Eurokodów. Oddziaływania I Obciążenia.Document8 pagesProjektowanie Mostów WG Eurokodów. Oddziaływania I Obciążenia.Dariusz Sobala100% (2)
- Projekt Konstrukcje Betonowe - Elementy I HaleDocument72 pagesProjekt Konstrukcje Betonowe - Elementy I HalePiotr SłotaNo ratings yet
- Absurdy Drogi Ekspresowej S1Document29 pagesAbsurdy Drogi Ekspresowej S1domino bielskoNo ratings yet
- Strop Płytowo Słupowy Metodą Ram Wydzielonych5Document34 pagesStrop Płytowo Słupowy Metodą Ram Wydzielonych5ovezpgNo ratings yet
- Analiza Dynamiczna Kładki Dla Pieszych W MalborkuDocument7 pagesAnaliza Dynamiczna Kładki Dla Pieszych W MalborkuBartoszNo ratings yet
- Symbole Geotechniczne GruntówDocument1 pageSymbole Geotechniczne GruntówAdrian Nato100% (1)
- 02Document10 pages02Agnes_CatNo ratings yet
- D3 - Obciążenia Dźwignic. Siły Dynamiczne PodnoszeniaDocument8 pagesD3 - Obciążenia Dźwignic. Siły Dynamiczne PodnoszeniarniziołNo ratings yet
- Konstrukcje: ElbetoweDocument20 pagesKonstrukcje: ElbetoweWojtek Goszczyński100% (1)
- Algorytm - Projektowanie Stopy Fundamentowej WG PN-En 1997-1Document7 pagesAlgorytm - Projektowanie Stopy Fundamentowej WG PN-En 1997-1KrzysztofOssowskiNo ratings yet
- KPEDDocument110 pagesKPEDJacek Wesołowski0% (1)
- Obliczanie Grubości Ścianki Powłoki Walcowej ZbiornikaDocument6 pagesObliczanie Grubości Ścianki Powłoki Walcowej ZbiornikaRajmund KonarskiNo ratings yet
- 13 Ruch DrgającyDocument12 pages13 Ruch Drgającyscribd.rg97dNo ratings yet
- Wyklad Kalisz RRozniczkoweDocument21 pagesWyklad Kalisz RRozniczkoweJan KowalskiNo ratings yet
- SciagaDocument3 pagesSciaga103001No ratings yet