You might also like
- Verizon Subpoena ManualDocument10 pagesVerizon Subpoena Manual...tho the name has changed..the pix remains the same.....67% (3)
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- Automatic Car Washing SystemDocument56 pagesAutomatic Car Washing SystemchakrimvnNo ratings yet
- Succeed in Aptis StudentDocument114 pagesSucceed in Aptis StudentLaura Sobrino OrtizNo ratings yet
- Digital Blind Background Calibration of Imperfections in Time-Interleaved AdcsDocument11 pagesDigital Blind Background Calibration of Imperfections in Time-Interleaved AdcschakrimvnNo ratings yet
- Shanthi Pavan - CT DSM, Design Considerations - 2016Document6 pagesShanthi Pavan - CT DSM, Design Considerations - 2016Saleh Heidary ShalmanyNo ratings yet
- A Scalable Bandwidth Mismatch Calibration Technique For Time-Interleaved ADCs - Park2016Document9 pagesA Scalable Bandwidth Mismatch Calibration Technique For Time-Interleaved ADCs - Park2016dienmaytainhagiareNo ratings yet
- A Practical Self Calibration Scheme Impl20160413 27420 15b36o6 With Cover Page v2Document10 pagesA Practical Self Calibration Scheme Impl20160413 27420 15b36o6 With Cover Page v2MohammadNo ratings yet
- Backgroundcalibration MoonDocument8 pagesBackgroundcalibration MoonAlex WongNo ratings yet
- All-Digital Calibration of Timing Mismatch Error in Time-Interleaved Analog-to-Digital ConvertersDocument9 pagesAll-Digital Calibration of Timing Mismatch Error in Time-Interleaved Analog-to-Digital ConvertersHitechNo ratings yet
- A Design of 8 Fj/Conversion-Step 10-Bit 8Ms/S Low Power Asynchronous Sar Adc For Ieee 802.15.1 Iot Sensor Based ApplicationsDocument11 pagesA Design of 8 Fj/Conversion-Step 10-Bit 8Ms/S Low Power Asynchronous Sar Adc For Ieee 802.15.1 Iot Sensor Based ApplicationsNikhitaNo ratings yet
- A 10-Bit 2.6-GSs Time-Interleaved SAR ADC With A Digital-Mixing Timing-Skew Calibration TechniqueDocument10 pagesA 10-Bit 2.6-GSs Time-Interleaved SAR ADC With A Digital-Mixing Timing-Skew Calibration TechniqueheqiNo ratings yet
- A 12-Bit SAR ADC With A DAC-Configurable Window Switching SchemeDocument11 pagesA 12-Bit SAR ADC With A DAC-Configurable Window Switching SchemeSilpa VelagaletiNo ratings yet
- Time Interleaved AdcsDocument8 pagesTime Interleaved Adcsmarwen_zNo ratings yet
- ADC Static Characterization Using Nonlinear Ramp SignalDocument8 pagesADC Static Characterization Using Nonlinear Ramp SignalketkyhuNo ratings yet
- ESTIMATION AND CORRECTION OF GAIN MISMATCH AND TIMING ERROR IN TIME-INTERLEAVED ADCs BASED ON DFTDocument10 pagesESTIMATION AND CORRECTION OF GAIN MISMATCH AND TIMING ERROR IN TIME-INTERLEAVED ADCs BASED ON DFTvanthanhsqttNo ratings yet
- Ciec 2014 6959082Document5 pagesCiec 2014 6959082SounakDuttaNo ratings yet
- Design and Experimental Evaluation of A Time-Interleaved ADC Calibration Algorithm For Application in High-Speed Communication SystemsDocument12 pagesDesign and Experimental Evaluation of A Time-Interleaved ADC Calibration Algorithm For Application in High-Speed Communication SystemsRahul ShandilyaNo ratings yet
- Frequency Response Mismatches in 4-Channel Time-Interleaved ADCs Analysis, Blind Identification, and Correction - Simran2015Document12 pagesFrequency Response Mismatches in 4-Channel Time-Interleaved ADCs Analysis, Blind Identification, and Correction - Simran2015dienmaytainhagiareNo ratings yet
- Digital Background Calibration of A Split Current-Steering DACDocument11 pagesDigital Background Calibration of A Split Current-Steering DACantonio ScacchiNo ratings yet
- Multi Core Processing For Software Radio PDFDocument6 pagesMulti Core Processing For Software Radio PDFmoon sunNo ratings yet
- Microprocessors and Microsystems: G. Anusha, P. DeepaDocument7 pagesMicroprocessors and Microsystems: G. Anusha, P. DeepaDarshan BysaniNo ratings yet
- Background Calibration MoonDocument8 pagesBackground Calibration Moonmanas bhasinNo ratings yet
- A 77.3-dB SNDR 62.5-kHz Bandwidth Continuous-Time Noise-Shaping SAR ADC With Duty-Cycled GM-C IntegratorDocument10 pagesA 77.3-dB SNDR 62.5-kHz Bandwidth Continuous-Time Noise-Shaping SAR ADC With Duty-Cycled GM-C IntegratorAshwin BhatNo ratings yet
- A Flexible and Scalable Structure To Compensate Frequency Response Mismatches in Time-Interleaved ADCs - Vogel2009Document13 pagesA Flexible and Scalable Structure To Compensate Frequency Response Mismatches in Time-Interleaved ADCs - Vogel2009dienmaytainhagiareNo ratings yet
- 2011 TVLSI ADCDACLoopbackDocument11 pages2011 TVLSI ADCDACLoopbackravhyd2023No ratings yet
- A Simple Yet Efficient Accuracy-Configurable Adder DesignDocument14 pagesA Simple Yet Efficient Accuracy-Configurable Adder DesignVinay KelurNo ratings yet
- p657 DaltDocument13 pagesp657 Dalt张浮云No ratings yet
- Wang 2008Document6 pagesWang 2008Ameya DeshpandeNo ratings yet
- Multigigabit BottleneckDocument6 pagesMultigigabit BottleneckRomualdo Begale PrudêncioNo ratings yet
- A 10-Bit 60-MSs Low-Power Pipelined ADC With Split-Capacitor CDS Technique-xBZDocument5 pagesA 10-Bit 60-MSs Low-Power Pipelined ADC With Split-Capacitor CDS Technique-xBZjulio perezNo ratings yet
- Transactions Briefs: A Single Channel Split Adc Structure For Digital Background Calibration in Pipelined AdcsDocument5 pagesTransactions Briefs: A Single Channel Split Adc Structure For Digital Background Calibration in Pipelined AdcsRahul ShandilyaNo ratings yet
- F2203 English e TarjomeDocument16 pagesF2203 English e Tarjomeellena.clay.artNo ratings yet
- Jse 2020 0105Document10 pagesJse 2020 0105W.M. FNo ratings yet
- Li2018 PDFDocument11 pagesLi2018 PDFbaluNo ratings yet
- Noise Modeling and Analysis of SAR ADCsDocument9 pagesNoise Modeling and Analysis of SAR ADCsmustafaNo ratings yet
- All-Digital Scalable and Reconfigurable Wide-Input Range Stochastic ADCDocument5 pagesAll-Digital Scalable and Reconfigurable Wide-Input Range Stochastic ADCmmmkNo ratings yet
- A Scaling-Friendly Low-Power Small-Area DeltaSigma ADC With VCO-Based Integrator and Intrinsic Mismatch Shaping CapabilityDocument13 pagesA Scaling-Friendly Low-Power Small-Area DeltaSigma ADC With VCO-Based Integrator and Intrinsic Mismatch Shaping Capabilitysiraporn sakphromNo ratings yet
- Amplifier DesignDocument9 pagesAmplifier Designian neymarNo ratings yet
- Tsai 2021 BHJJDocument9 pagesTsai 2021 BHJJHemanthNo ratings yet
- WCECS2013 pp645-650Document6 pagesWCECS2013 pp645-650Minh CongNo ratings yet
- Noise Modeling and Analysis of Sar Adcs: Ieee Transactions On Very Large Scale Integration (Vlsi) Systems December 2015Document10 pagesNoise Modeling and Analysis of Sar Adcs: Ieee Transactions On Very Large Scale Integration (Vlsi) Systems December 2015mustafaNo ratings yet
- Simulink Behavioral Modeling of A 10-Bit Pipelined ADCDocument9 pagesSimulink Behavioral Modeling of A 10-Bit Pipelined ADCbhasin_hemantNo ratings yet
- A Low-Cost On-Chip Built-In Self-Test Solution ForDocument12 pagesA Low-Cost On-Chip Built-In Self-Test Solution ForMohammed MohammedaliNo ratings yet
- ADC DAC Loopback LinearityDocument15 pagesADC DAC Loopback LinearityparrotpanduNo ratings yet
- A Mismatch Calibration Technique For SAR ADCs Based On Deterministic Self-Calibration and Stochastic QuantizationDocument14 pagesA Mismatch Calibration Technique For SAR ADCs Based On Deterministic Self-Calibration and Stochastic QuantizationAnand ChaudharyNo ratings yet
- Gm/idDocument10 pagesGm/idAmith NayakNo ratings yet
- High-Performance Low-Power Carry Speculative Addition With Variable LatencyDocument13 pagesHigh-Performance Low-Power Carry Speculative Addition With Variable LatencyPiyush ParasharNo ratings yet
- 10 Bit Single-Slope ADC With Error Quantification and Double Reset Technique For CMOS Image SensorDocument8 pages10 Bit Single-Slope ADC With Error Quantification and Double Reset Technique For CMOS Image Sensorruben rodriguezNo ratings yet
- Statistical Spectra and Distortion Analysis of Time-Interleaved Sampling Bandwidth Mismatch - 2008Document5 pagesStatistical Spectra and Distortion Analysis of Time-Interleaved Sampling Bandwidth Mismatch - 2008dienmaytainhagiareNo ratings yet
- A 0.0022 MM 10 Bit 20 MS S SAR ADC With Passive Single-Ended-to-Differential-ConverterDocument11 pagesA 0.0022 MM 10 Bit 20 MS S SAR ADC With Passive Single-Ended-to-Differential-ConverterAshwin BhatNo ratings yet
- Sensors: A Digital-Analog Hybrid System-on-Chip For Capacitive Sensor Measurement and ControlDocument14 pagesSensors: A Digital-Analog Hybrid System-on-Chip For Capacitive Sensor Measurement and ControlChao-Shiun WangNo ratings yet
- AAAI 2022 Demo Submission 285 RevisedDocument3 pagesAAAI 2022 Demo Submission 285 RevisedMitch GusatNo ratings yet
- 5.g 133 - Efficient Fault Effect Extraction For An IntegratedDocument4 pages5.g 133 - Efficient Fault Effect Extraction For An IntegratedVančo LitovskiNo ratings yet
- PLTS 2014Document25 pagesPLTS 2014cgrachanenNo ratings yet
- TVLSI_paper13Document12 pagesTVLSI_paper13djstubbornkingNo ratings yet
- A Survey of Voltage-Controlled-Oscillator-Based Δ - Σ ADCsDocument9 pagesA Survey of Voltage-Controlled-Oscillator-Based Δ - Σ ADCssiraporn sakphromNo ratings yet
- 1997 TCASII I. Galton Spectral Shaping of Circuit Errors in Digital To Analog ConvertersDocument10 pages1997 TCASII I. Galton Spectral Shaping of Circuit Errors in Digital To Analog Converterskijiji userNo ratings yet
- A 14 Bit, 30 MS/S, 38 MW SAR ADC Using Noise Filter Gear ShiftingDocument5 pagesA 14 Bit, 30 MS/S, 38 MW SAR ADC Using Noise Filter Gear ShiftingMa SeenivasanNo ratings yet
- A Reconfigurable Time Multiplexed Multichannel ADC Model For Efficient Data AcquisitionDocument4 pagesA Reconfigurable Time Multiplexed Multichannel ADC Model For Efficient Data Acquisitionaakashbari.ec20No ratings yet
- Research Trends and Challenges On DAC TestingDocument6 pagesResearch Trends and Challenges On DAC TestingSouro Shubhro DasNo ratings yet
- Spectral Spurs Due To Quantization in Nyquist ADCsDocument18 pagesSpectral Spurs Due To Quantization in Nyquist ADCsNRicalNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- AI Unit-IIIDocument75 pagesAI Unit-IIIchakrimvnNo ratings yet
- Non-Semiconductor LasersDocument20 pagesNon-Semiconductor LaserschakrimvnNo ratings yet
- Analyze Analytical InstrumentsDocument78 pagesAnalyze Analytical InstrumentschakrimvnNo ratings yet
- Electronics 08 00056Document13 pagesElectronics 08 00056chakrimvnNo ratings yet
- Analyze Analytical InstrumentsDocument78 pagesAnalyze Analytical InstrumentschakrimvnNo ratings yet
- Home Electrical Energy ManagmentDocument1 pageHome Electrical Energy ManagmentchakrimvnNo ratings yet
- Temperature Sensors TypesDocument110 pagesTemperature Sensors TypesGlan DevadhasNo ratings yet
- Certificate of Participation: J Venkata LakshmiDocument1 pageCertificate of Participation: J Venkata LakshmichakrimvnNo ratings yet
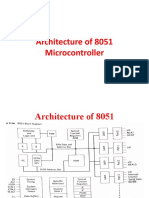
- Architecture of the 8051 MicrocontrollerDocument22 pagesArchitecture of the 8051 MicrocontrollerchakrimvnNo ratings yet
- Emitter Coupled Binary (Schmitt Trigger)Document28 pagesEmitter Coupled Binary (Schmitt Trigger)chakrimvnNo ratings yet
- Analyze Analytical InstrumentsDocument78 pagesAnalyze Analytical InstrumentschakrimvnNo ratings yet
- 8086 Min Max ModesDocument31 pages8086 Min Max ModeschakrimvnNo ratings yet
- Analytical Instruments Infrared SourcesDocument89 pagesAnalytical Instruments Infrared SourceschakrimvnNo ratings yet
- Unit 3Document66 pagesUnit 3chakrimvnNo ratings yet
- Oeli 2 Assign 6 3 14Document5 pagesOeli 2 Assign 6 3 14chakrimvnNo ratings yet
- MICROPROCESSORS & MICROCONTROLLERS MCQ QUIZDocument2 pagesMICROPROCESSORS & MICROCONTROLLERS MCQ QUIZchakrimvnNo ratings yet
- Nuclear Magnetic Resonance SpectrosDocument10 pagesNuclear Magnetic Resonance SpectroschakrimvnNo ratings yet
- M1L3Document85 pagesM1L3korumillichanduNo ratings yet
- Interfacing The KeyboardDocument28 pagesInterfacing The Keyboardundole100% (1)
- Simulation of Pid Controller Using MicrocontrollerDocument1 pageSimulation of Pid Controller Using MicrocontrollerchakrimvnNo ratings yet
- MITM Online Class Timetable Sem 3, 5, 7Document3 pagesMITM Online Class Timetable Sem 3, 5, 7Mohallalibrary NgoNo ratings yet
- ITEC255-Chapter 1Document12 pagesITEC255-Chapter 1asnescribNo ratings yet
- Introduction of Sound in Motion PictureDocument40 pagesIntroduction of Sound in Motion PicturedcNo ratings yet
- Wireless World 1990 08Document100 pagesWireless World 1990 08Milton Nast0% (1)
- QuickSpecs HP Pro Series 400 G9 Desktops PCsDocument99 pagesQuickSpecs HP Pro Series 400 G9 Desktops PCsJose Luis Gomez EliasNo ratings yet
- Manual Ref ZX300Document32 pagesManual Ref ZX300dan123_1No ratings yet
- Medusa 4 TS 09 033Document2 pagesMedusa 4 TS 09 033doantran2508No ratings yet
- Fisa Tehnica Camera Supraveghere IP Wireless Dahua IPC-HFW1435S-W 4 MP IR 30 M 2.8 MM 16x 1Document2 pagesFisa Tehnica Camera Supraveghere IP Wireless Dahua IPC-HFW1435S-W 4 MP IR 30 M 2.8 MM 16x 1DanielTeglasNo ratings yet
- EE223 Signals & Systems - Spring 2021 Assignment 5Document11 pagesEE223 Signals & Systems - Spring 2021 Assignment 5Muhammad AbdullahNo ratings yet
- Cisco SD-WAN Cloud Privacy Data SheetDocument5 pagesCisco SD-WAN Cloud Privacy Data SheetRoshan TejasNo ratings yet
- Alibaba Cloud Products Brochure - enDocument85 pagesAlibaba Cloud Products Brochure - enAnkush AdlakhaNo ratings yet
- Topic-5 IC Layout (Stick Diagram) : OutlineDocument47 pagesTopic-5 IC Layout (Stick Diagram) : Outline周裕琳No ratings yet
- CHIMEI INNOLUX V390HK1-LS5 DatasheetDocument3 pagesCHIMEI INNOLUX V390HK1-LS5 DatasheetKerlin SanabriaNo ratings yet
- 11.2.1 Packet Tracer - Configure and Verify eBGP - ILM TraducidoDocument4 pages11.2.1 Packet Tracer - Configure and Verify eBGP - ILM TraducidoCrisgamerGDNo ratings yet
- Course Plan Comm Engg 2020-2021Document8 pagesCourse Plan Comm Engg 2020-2021Satheeswaran VNo ratings yet
- X 830 ManualDocument8 pagesX 830 ManualCristian Ledezma CadenasNo ratings yet
- Service Manual: Echolife Hg850 Gpon TerminalDocument81 pagesService Manual: Echolife Hg850 Gpon TerminalInd Pol ComNo ratings yet
- Pin Connections: The 4013 Has Two D-Type Flip-Flops, Which You Can Use IndependentlyDocument12 pagesPin Connections: The 4013 Has Two D-Type Flip-Flops, Which You Can Use IndependentlyKomal RajputNo ratings yet
- S1-2.Technology Evolution - Qualcomm (Aug 16) - v2Document27 pagesS1-2.Technology Evolution - Qualcomm (Aug 16) - v2Dao Trung DungNo ratings yet
- Denon dn-d4000 v.1 (ET)Document50 pagesDenon dn-d4000 v.1 (ET)avshalleNo ratings yet
- Operators and Safety Manual Service & Maintenance Manual Illustrated Parts ManualDocument144 pagesOperators and Safety Manual Service & Maintenance Manual Illustrated Parts ManualCesarSuarezNo ratings yet
- Ixnetwork OverviewDocument23 pagesIxnetwork OverviewSelvam Gopalsamy100% (1)
- Manual Phonic Am5ge y Am6geDocument32 pagesManual Phonic Am5ge y Am6geRicardo Jeria OrtizNo ratings yet
- Cambridge IGCSE™: Information and Communication Technology 0417/11 October/November 2020Document9 pagesCambridge IGCSE™: Information and Communication Technology 0417/11 October/November 2020osmanfut1No ratings yet
- Practical Electronics. A Self-Teaching Guide. Wiley Self-Teaching GuidesDocument4 pagesPractical Electronics. A Self-Teaching Guide. Wiley Self-Teaching GuidesAKITA DRILLNo ratings yet
- O Ran Open Ecosystem Power 5g Applications White Papers Books enDocument7 pagesO Ran Open Ecosystem Power 5g Applications White Papers Books enAykut YilmazNo ratings yet
- Pag QSL Net Chap6-3Document23 pagesPag QSL Net Chap6-3Arturo FuentesNo ratings yet
- Moticam X3 Start GuideDocument6 pagesMoticam X3 Start GuideNicole AsquiNo ratings yet