You might also like
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Ee 591 Machine 2 PDFDocument39 pagesEe 591 Machine 2 PDFPrabhat Kumar SahuNo ratings yet
- Altivar 312 - ATV312H075N4Document4 pagesAltivar 312 - ATV312H075N4Jose Norton Doria100% (1)
- Installation single-line diagram protection schemeDocument5 pagesInstallation single-line diagram protection schemeAnonymous CO7aaHrNo ratings yet
- Maintenance of TransformerDocument8 pagesMaintenance of TransformeranilsinghteslaNo ratings yet
- Closed Loop Speed Control of DC Motor DrivesDocument4 pagesClosed Loop Speed Control of DC Motor DrivesypobuleshNo ratings yet
- DNV Earthing Rule Pag.36Document1 pageDNV Earthing Rule Pag.36CHOCAMAN1No ratings yet
- Automatic Alternator SynchronisationDocument24 pagesAutomatic Alternator SynchronisationHemant Patel50% (2)
- A Presentation ON Overhead Line Insulators Faculty: Gunjan VarshneyDocument67 pagesA Presentation ON Overhead Line Insulators Faculty: Gunjan VarshneyGunjan VarshneyNo ratings yet
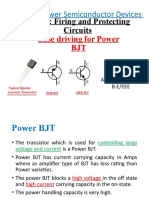
- Advanced Power BJT Base Driving CircuitsDocument16 pagesAdvanced Power BJT Base Driving CircuitsSachin SivaNo ratings yet
- PV PQ Bus Switching Power Flow Pscc2008 - 128Document7 pagesPV PQ Bus Switching Power Flow Pscc2008 - 128kcirrenwodNo ratings yet
- Synopsis Proposal For 2021Document4 pagesSynopsis Proposal For 20212k18-EE-243 Vethushan VinnayagamoorththiNo ratings yet
- Insulation Dielectric Test of TransformerDocument2 pagesInsulation Dielectric Test of TransformerMukhtiar HussainNo ratings yet
- Chapter Three: Operation of Auto Recloser and Sectionalizer 3.1.Document14 pagesChapter Three: Operation of Auto Recloser and Sectionalizer 3.1.Umar Wijaksono100% (1)
- How To Size MCBDocument4 pagesHow To Size MCBpravin chawleNo ratings yet
- Z Source InverterDocument16 pagesZ Source InverterpradeepagrahariNo ratings yet
- Transformer ReportDocument39 pagesTransformer ReportSHAROON SARDAR GHULAMNo ratings yet
- Zorc PresentationDocument18 pagesZorc PresentationAyman AboudNo ratings yet
- Operation of IDMT RelayDocument8 pagesOperation of IDMT RelayAbhishek HotaNo ratings yet
- Testing of Breakers: Unit-4Document31 pagesTesting of Breakers: Unit-4REDAPPLE MEDIA100% (1)
- Improve Power Factor by Capacitive VAR CompensationDocument15 pagesImprove Power Factor by Capacitive VAR CompensationMalith DeemanthaNo ratings yet
- Indian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringDocument4 pagesIndian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringKool PrashantNo ratings yet
- Cba 3000Document98 pagesCba 3000AlejandroNo ratings yet
- Auto Selection of Any Available PhaseDocument16 pagesAuto Selection of Any Available PhaseRyan HarrisNo ratings yet
- AC Motor Name Plate - Terms & MeaningsDocument2 pagesAC Motor Name Plate - Terms & Meaningsavandetq15No ratings yet
- Harmonics MCPQG Ieee 2005Document54 pagesHarmonics MCPQG Ieee 200523OtterNo ratings yet
- 400kv Final PPT by MayankDocument20 pages400kv Final PPT by MayankMayank Mishra83% (12)
- Lecture 4 Diode Circuits NewDocument76 pagesLecture 4 Diode Circuits Newصدام حسینNo ratings yet
- Rating of The Circuit BreakersDocument19 pagesRating of The Circuit BreakersRoopa ReddyNo ratings yet
- Part 4 RTCC ReviseDocument9 pagesPart 4 RTCC ReviseqianghoNo ratings yet
- Condenser BushingDocument4 pagesCondenser BushingSanthosh RMNo ratings yet
- Unit 2 Electromagnetic Relays (Switchgear and Protection)Document91 pagesUnit 2 Electromagnetic Relays (Switchgear and Protection)sujithNo ratings yet
- Power Control Devices Report Ni SottoDocument61 pagesPower Control Devices Report Ni SottoLEONEL SOTTONo ratings yet
- Generac - Gen Insulation ClassDocument4 pagesGenerac - Gen Insulation Class6609503100% (1)
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDocument11 pagesSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- Experiment 2: Level Transmitter CalibrationDocument13 pagesExperiment 2: Level Transmitter CalibrationMuhammad FawwazNo ratings yet
- Type Irxm: Circulating Current RelayDocument7 pagesType Irxm: Circulating Current RelayThejaswini ArNo ratings yet
- Electrical Protective Equipment: Fuses, MCBs, ELCBs and Their Working PrinciplesDocument17 pagesElectrical Protective Equipment: Fuses, MCBs, ELCBs and Their Working PrinciplesKhageswar SamalNo ratings yet
- OLTCDocument4 pagesOLTCGiwrgos GewrgiadisNo ratings yet
- Vector Group Code ExplainedDocument8 pagesVector Group Code ExplainedSuraj Kumar GuptaNo ratings yet
- Application of Shunt Active Power Filter Full ReportDocument15 pagesApplication of Shunt Active Power Filter Full ReportShantha KumarNo ratings yet
- 45 - 60055 - EE512 - 2015 - 5 - 2 - 1 - Experiment 2 PLC PDFDocument7 pages45 - 60055 - EE512 - 2015 - 5 - 2 - 1 - Experiment 2 PLC PDFkrishnandrkNo ratings yet
- VZ E Product Catalogue Sept2011Document16 pagesVZ E Product Catalogue Sept2011anand.bala100% (1)
- Thyristor Triggering: Figure 1 Thyristor Circuit With Gate ResistorsDocument2 pagesThyristor Triggering: Figure 1 Thyristor Circuit With Gate ResistorsPrincess LandichoNo ratings yet
- Maintaining Electrical SystemsDocument8 pagesMaintaining Electrical SystemsHealthyCut FarmsNo ratings yet
- ATS PANELS 2018 FOR Nov 29th 2018Document14 pagesATS PANELS 2018 FOR Nov 29th 2018zainahmedscribdNo ratings yet
- AC Generator Frequency-Power CharacteristicsDocument70 pagesAC Generator Frequency-Power CharacteristicsJohn Patrick CeldaNo ratings yet
- Chapter 3 Transformer Connections, Operation, and Specialty TransformersDocument38 pagesChapter 3 Transformer Connections, Operation, and Specialty TransformersSihamaSihamNo ratings yet
- Electrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Document5 pagesElectrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Danial AkramNo ratings yet
- A Alternator DesignDocument6 pagesA Alternator DesignKathir RkpNo ratings yet
- Transformer - NT PDFDocument108 pagesTransformer - NT PDFReshab Sahoo100% (1)
- International Refereed Journal of Engineering and Science (IRJES)Document8 pagesInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNo ratings yet
- A159109546795 PDFDocument95 pagesA159109546795 PDFSuneetha AsNo ratings yet
- FLupeJFHSye7qXiRR9sn0g Sect3-3Document8 pagesFLupeJFHSye7qXiRR9sn0g Sect3-3مصطفى حمدىNo ratings yet
- 1 LectureDocument16 pages1 Lectureمصطفى حمدىNo ratings yet
- Industrial Networks LANsDocument171 pagesIndustrial Networks LANsمصطفى حمدىNo ratings yet
- Starting Techniques of Induction MachinesDocument32 pagesStarting Techniques of Induction Machinesمصطفى حمدىNo ratings yet
- Introduction (V1)Document24 pagesIntroduction (V1)مصطفى حمدىNo ratings yet
- Introduction (V1)Document24 pagesIntroduction (V1)مصطفى حمدىNo ratings yet
- Revision IMDocument22 pagesRevision IMمصطفى حمدىNo ratings yet
- No. of Working Days: Periodic Test-2Document62 pagesNo. of Working Days: Periodic Test-2crapjorust123No ratings yet
- Kaplan Turbine Working As A Propeller CFD InvestigDocument11 pagesKaplan Turbine Working As A Propeller CFD InvestigclaudehackerNo ratings yet
- .Umerical $istance 0rotection 2elay 3) 02/4%# 3!:) Nstruction - AnualDocument326 pages.Umerical $istance 0rotection 2elay 3) 02/4%# 3!:) Nstruction - AnualngocanhvyNo ratings yet
- Actividades Cultura InglesaDocument19 pagesActividades Cultura InglesaCarlos BulnesNo ratings yet
- Communicative English Solutions for Class IXDocument56 pagesCommunicative English Solutions for Class IXSahilNo ratings yet
- 3 - Technical Engine DataDocument90 pages3 - Technical Engine Datatruong100% (1)
- JET 30 Multipurpose Single Pump UnitsDocument116 pagesJET 30 Multipurpose Single Pump UnitsAlberto VelásquezNo ratings yet
- ENA EREC G99 Issue 1 Amendment 8 (2021) 0.1Document443 pagesENA EREC G99 Issue 1 Amendment 8 (2021) 0.1Marek SzwechlowiczNo ratings yet
- FAT Form Winch UnitDocument7 pagesFAT Form Winch UnitYadi KusmayadiNo ratings yet
- De2635 5807 PDFDocument3 pagesDe2635 5807 PDFEdinson Ariel Chavarro QuinteroNo ratings yet
- Hillbrandt Axel CV AH-PC E 1216Document4 pagesHillbrandt Axel CV AH-PC E 1216HillbrandtNo ratings yet
- Reykjavik Smart City Case StudyDocument1 pageReykjavik Smart City Case StudyPreene Dias officialNo ratings yet
- Oil & Gas Accounting 1Document78 pagesOil & Gas Accounting 1jm100% (2)
- Holden Commodore VZ Fault CodesDocument5 pagesHolden Commodore VZ Fault Codesashleyshaw0% (1)
- Bronzeystrainer - Kvs 200 TDocument1 pageBronzeystrainer - Kvs 200 TTiến Lý NhậtNo ratings yet
- Unit 420, One Oasis Condominium,: Ortigas, Pasig City 1608 Tel. No. (02) 941-1408, 0995-7561767Document6 pagesUnit 420, One Oasis Condominium,: Ortigas, Pasig City 1608 Tel. No. (02) 941-1408, 0995-7561767Jasper AlcantaraNo ratings yet
- Clima-8500 Evo - GBDocument2 pagesClima-8500 Evo - GBBig ZevsNo ratings yet
- Energizer l91 DatasheetDocument2 pagesEnergizer l91 DatasheetGERSONZAGALOTANKNo ratings yet
- Ultrasound Machine: Name and CodingDocument8 pagesUltrasound Machine: Name and CodingMr.SDNo ratings yet
- Kimpton Hotel Case - Group 4Document21 pagesKimpton Hotel Case - Group 4Saurabh PaliwalNo ratings yet
- General Physics ExercisesDocument49 pagesGeneral Physics ExercisesaloNo ratings yet
- FTJ November 2010Document6 pagesFTJ November 2010Sharan Kumar GNo ratings yet
- Taufik Hidayat Gultom PS3 D375Document26 pagesTaufik Hidayat Gultom PS3 D375Dava JrNo ratings yet
- EUROPA REFERENCE BOOKS For Automotive Te PDFDocument20 pagesEUROPA REFERENCE BOOKS For Automotive Te PDFLaércio LaercioNo ratings yet
- Some of The Organizations / Universities Offering Summer Training / Internship (Listed Department-Wise)Document8 pagesSome of The Organizations / Universities Offering Summer Training / Internship (Listed Department-Wise)Asis DasNo ratings yet
- PMV - en - 12966 - 1 NORMA EUROPEA PDFDocument74 pagesPMV - en - 12966 - 1 NORMA EUROPEA PDFcumicaNo ratings yet
- Riser Diagram PDFDocument1 pageRiser Diagram PDFChristian FloresNo ratings yet
- Finned Tube Heat Exchanger - DetailsDocument7 pagesFinned Tube Heat Exchanger - DetailsSakthi VelNo ratings yet
- CHE 110: Environmental Studies: Unit: 1 - Lecture: 5 - CHE110 - VKDocument17 pagesCHE 110: Environmental Studies: Unit: 1 - Lecture: 5 - CHE110 - VKAditya SajjaNo ratings yet
- Mechanical & Electrical Reasoning Study GuideDocument24 pagesMechanical & Electrical Reasoning Study GuideAbdu AbdoulayeNo ratings yet