You might also like
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- CALCULATING EARTHWORK VOLUMES AND SLOPESDocument7 pagesCALCULATING EARTHWORK VOLUMES AND SLOPESkevin_ramos007100% (1)
- 4-1 The Mechanics Characteristic of FrameDocument50 pages4-1 The Mechanics Characteristic of FramedavidNo ratings yet
- Key 12Document1 pageKey 12EmilyNo ratings yet
- MODULE 7 - Buckling of FramesDocument42 pagesMODULE 7 - Buckling of FramesJay RickNo ratings yet
- PHYS 102 Final Exam SolutionsDocument4 pagesPHYS 102 Final Exam SolutionsSerkan Doruk HazinedarNo ratings yet
- P2213 Final S23 Formula SheetDocument3 pagesP2213 Final S23 Formula Sheethi hiNo ratings yet
- The Analysis of The Global Ship Strengths in Vertical Plane With 3D-Fem Hull ModelsDocument31 pagesThe Analysis of The Global Ship Strengths in Vertical Plane With 3D-Fem Hull ModelsAlina NastasaNo ratings yet
- Quantum Mechanics: 1. Wave FunctionsDocument25 pagesQuantum Mechanics: 1. Wave FunctionsJeevanNo ratings yet
- Structural Stability 1Document10 pagesStructural Stability 1Tugas Hutomo PutraNo ratings yet
- Ce 579: Structral Stability and DesignDocument20 pagesCe 579: Structral Stability and DesignjorgeballabenNo ratings yet
- Beermom Ism c09Document254 pagesBeermom Ism c09joão victor carvalhoNo ratings yet
- Formular 154Document1 pageFormular 154พิมพ์ โพธิสัตว์No ratings yet
- Physics Advanced Level Problem Solving (ALPS-1) - SolutionDocument16 pagesPhysics Advanced Level Problem Solving (ALPS-1) - SolutionIshan AgnohotriNo ratings yet
- Metodo de FuerzaDocument37 pagesMetodo de FuerzaJheysson Raphael Lopez guevaraNo ratings yet
- BeamDocument86 pagesBeamprempragupta123No ratings yet
- SA 18 19 XII XII Physics Unit-4 Section-ADocument75 pagesSA 18 19 XII XII Physics Unit-4 Section-Aabhi100% (1)
- Geometri Jalan Raya 3 Diagram SuperelevasiDocument10 pagesGeometri Jalan Raya 3 Diagram SuperelevasiAyu KrismaNo ratings yet
- Fluid Mechanics pp82 91Document10 pagesFluid Mechanics pp82 91Alvaro CujiNo ratings yet
- Academy: 9: Test: Geometry: 1.basic Concepts, 2.parallel Lines, 3.triangles Marks: 40dur: 1.30Document2 pagesAcademy: 9: Test: Geometry: 1.basic Concepts, 2.parallel Lines, 3.triangles Marks: 40dur: 1.30Sandeep MuniNo ratings yet
- Nonlinear beam column buckling analysis by FEMDocument13 pagesNonlinear beam column buckling analysis by FEMPrashant ThapaNo ratings yet
- Chapter 5Document92 pagesChapter 5M ModaxIrNo ratings yet
- Geometri Jalan Raya 3 Diagram SuperelevasiDocument10 pagesGeometri Jalan Raya 3 Diagram SuperelevasiAyu KrismaNo ratings yet
- Electrostat-09-Solution Sub and Obj ElectrostatDocument19 pagesElectrostat-09-Solution Sub and Obj ElectrostatRaju SinghNo ratings yet
- ME302 - Final Exam Formula SheetDocument2 pagesME302 - Final Exam Formula SheetAnil YildizNo ratings yet
- QM Note1Document17 pagesQM Note1imran hossainNo ratings yet
- Homework SolutionDocument13 pagesHomework Solutionguadbe878No ratings yet
- Champ Square Term 4 Paper AdvanceDocument13 pagesChamp Square Term 4 Paper Advancepoonam guptaNo ratings yet
- Strain Gages: Hambatan Kawat Perubahan Hambatan KawatDocument8 pagesStrain Gages: Hambatan Kawat Perubahan Hambatan KawatOcta RioNo ratings yet
- Three Pinned Arch: Theory of StructureDocument37 pagesThree Pinned Arch: Theory of StructureTing KuanNo ratings yet
- Homework 2Document3 pagesHomework 2euler96No ratings yet
- CIVL Pablo Hurtado AssignmentDocument4 pagesCIVL Pablo Hurtado AssignmentPablo Esteban Hurtado OjedaNo ratings yet
- Module 2 - Mechanical Stability Models PDFDocument36 pagesModule 2 - Mechanical Stability Models PDFJoana Marie PercianoNo ratings yet
- Solid Mechanics ME 212 - Week 13Document9 pagesSolid Mechanics ME 212 - Week 13Mihir Kumar MechNo ratings yet
- Solutions To CN2116-JYL-2020-HW2: V C C C CDocument4 pagesSolutions To CN2116-JYL-2020-HW2: V C C C CSherrilyn MarzukiNo ratings yet
- MOT 2 JEE 2021 Solutions PDFDocument16 pagesMOT 2 JEE 2021 Solutions PDFBiswadeep GiriNo ratings yet
- Robotics1 20.02.12Document11 pagesRobotics1 20.02.12Ammar BendjeddouNo ratings yet
- PHYS 102 - General Physics II Midterm Exam 2 Solutions: V V P R R PDocument2 pagesPHYS 102 - General Physics II Midterm Exam 2 Solutions: V V P R R PNano SuyatnoNo ratings yet
- Civil21 AnDocument36 pagesCivil21 AnArchana ShNo ratings yet
- August 13Document13 pagesAugust 13Yash KalaNo ratings yet
- Plasma Physics (Phys 403) Single Particle Motion: Nonuniform B FieldDocument6 pagesPlasma Physics (Phys 403) Single Particle Motion: Nonuniform B FieldRobiul Islam RobiNo ratings yet
- Electric Fields Chapter 21Document33 pagesElectric Fields Chapter 21蔡承德No ratings yet
- Wk5B NotesDocument30 pagesWk5B Notesmohamed emamNo ratings yet
- EMI + AC-MecDocument5 pagesEMI + AC-MecAditya GoyalNo ratings yet
- Physics concepts explained in Vidyamandir classesDocument12 pagesPhysics concepts explained in Vidyamandir classesAnanmay ChauhanNo ratings yet
- Tutorial 6Document2 pagesTutorial 6Saransh MittalNo ratings yet
- Electric Potential and CapacitorsDocument4 pagesElectric Potential and CapacitorsAmir YonanNo ratings yet
- Analytic GeometryDocument53 pagesAnalytic GeometrySupriyo ChakrabortyNo ratings yet
- Test 1 (CCB20602) Reaction Engineering 1Document3 pagesTest 1 (CCB20602) Reaction Engineering 1Surendra Louis Dupuis NaikerNo ratings yet
- Finite Element Method-Beam: Computer Aided Design (EME-306 /) - B.TechDocument10 pagesFinite Element Method-Beam: Computer Aided Design (EME-306 /) - B.TechHimanshuNo ratings yet
- Dokumen.tips Commutation Techniques in Power ElectronicsDocument28 pagesDokumen.tips Commutation Techniques in Power ElectronicsMeral MeralNo ratings yet
- Mecânica Dos Sólidos II Barras Carregadas Axialmente PDFDocument7 pagesMecânica Dos Sólidos II Barras Carregadas Axialmente PDFcelsoNo ratings yet
- Reactor Volume Calculations for A → 3B ReactionDocument4 pagesReactor Volume Calculations for A → 3B Reactionنزار الدهاميNo ratings yet
- Physics Advanced Level Problem Solving (ALPS-10) - SolutionDocument8 pagesPhysics Advanced Level Problem Solving (ALPS-10) - SolutionSwapnil MandalNo ratings yet
- Beer's Law and It's ImplicationsDocument34 pagesBeer's Law and It's ImplicationsANUREET KAURNo ratings yet
- Derivation For The Frequency of RC Phase ShiftDocument8 pagesDerivation For The Frequency of RC Phase Shiftnidhi singh33% (3)
- Bar-Spring System - Structural StabilityDocument10 pagesBar-Spring System - Structural StabilityAnonymous Sl60bL50% (2)
- Steady State Conduction - One Dimension: 2.1. The Plane WallDocument8 pagesSteady State Conduction - One Dimension: 2.1. The Plane WallalanwijayaNo ratings yet
- Analisis de Velocidad Design of Machinery 3 RD Ed Robert Norton 2003 MengDocument26 pagesAnalisis de Velocidad Design of Machinery 3 RD Ed Robert Norton 2003 Mengandre sebastian ruiz trujilloNo ratings yet
- NK C SI R: Electrostatics, Home Work Sheet-2Document2 pagesNK C SI R: Electrostatics, Home Work Sheet-2AishwaryNo ratings yet
- Chap07 ShaftsDocument8 pagesChap07 ShaftsFatih AŞCINo ratings yet
- Chapter 7, Problem 3: S Mpa KDocument14 pagesChapter 7, Problem 3: S Mpa KFatih AŞCINo ratings yet
- Chap05 StaticFailureDocument9 pagesChap05 StaticFailureFatih AŞCINo ratings yet
- At The Free End A.: Chapter 5, Problem 18Document26 pagesAt The Free End A.: Chapter 5, Problem 18Fatih AŞCINo ratings yet
- Chapter 3 - Problem Solutions Problems Are Form Ugural's Book Chapter 3, Problem 29Document8 pagesChapter 3 - Problem Solutions Problems Are Form Ugural's Book Chapter 3, Problem 29Fatih AŞCINo ratings yet
- Export SCR Riser Analysis Report - Kim Young TaeDocument30 pagesExport SCR Riser Analysis Report - Kim Young TaeYoungtae Kim100% (1)
- Gas Turbine Engine Fundamentals TutorialDocument9 pagesGas Turbine Engine Fundamentals TutorialamirzokaeiNo ratings yet
- Heat Transfer EquipmentDocument105 pagesHeat Transfer EquipmentBernard BaluyotNo ratings yet
- Mechanics of Materials: C. Blanco, J.M. Cabrero, A. Martin-Meizoso, K.G. GebremedhinDocument7 pagesMechanics of Materials: C. Blanco, J.M. Cabrero, A. Martin-Meizoso, K.G. GebremedhinPK IMM FEB Bidang KaderNo ratings yet
- ETABS 2016 Concrete Frame Design: ETABS 2016 16.0.0 License # 1L4NYHW6GDTZBRADocument2 pagesETABS 2016 Concrete Frame Design: ETABS 2016 16.0.0 License # 1L4NYHW6GDTZBRARajib MaharjanNo ratings yet
- CHEM 1 - Lesson 3 - Part 2 - GAS LAWDocument46 pagesCHEM 1 - Lesson 3 - Part 2 - GAS LAWRoss TornNo ratings yet
- MASS AND ENERGY ANALYSIS OF CONTROL VOLUMESDocument39 pagesMASS AND ENERGY ANALYSIS OF CONTROL VOLUMESSachin GirohNo ratings yet
- Thermal Properties of An IglooDocument2 pagesThermal Properties of An IglooJuan Fernando Cano LarrotaNo ratings yet
- 1963-HASSELMAN-Elastic Energy at Fracture and Surface Energy As Design Criteria For Thermal ShockDocument6 pages1963-HASSELMAN-Elastic Energy at Fracture and Surface Energy As Design Criteria For Thermal Shockgutierrezcamposd20No ratings yet
- Verification 001Document6 pagesVerification 001Med El Hadi AbidiNo ratings yet
- Tabel-Thermo Gas Hasil Pmbakaran Cengel (SI-18 HLM)Document18 pagesTabel-Thermo Gas Hasil Pmbakaran Cengel (SI-18 HLM)rasid redNo ratings yet
- TN 10 PT 2 FinalDocument72 pagesTN 10 PT 2 FinalTee Klong RungNo ratings yet
- Waterjet Thesis - Rolls Royce PDFDocument170 pagesWaterjet Thesis - Rolls Royce PDFAmmy singhNo ratings yet
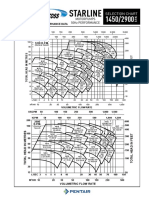
- Starline centrifugal pump performance chartDocument122 pagesStarline centrifugal pump performance chartThomas KamongNo ratings yet
- Sports AcousticsDocument43 pagesSports Acousticssiddhant raoNo ratings yet
- CH 24 Thermal Questions - KEY PDFDocument2 pagesCH 24 Thermal Questions - KEY PDFShe DilNo ratings yet
- Astm e 128 99 Rteyoa PDFDocument3 pagesAstm e 128 99 Rteyoa PDFHaydee ContrerasNo ratings yet
- Rots - Computational Modelling of Masonry With A View To Groningen Induced SeismicityDocument12 pagesRots - Computational Modelling of Masonry With A View To Groningen Induced SeismicityAdolfo Gálvez Villacorta100% (2)
- Machine Design Problems With SolutionsDocument27 pagesMachine Design Problems With SolutionsMarcial Jr. MilitanteNo ratings yet
- Wiley, Plasticity of Metals Experiments Models Computation (1999) (3527277285)Document427 pagesWiley, Plasticity of Metals Experiments Models Computation (1999) (3527277285)Mosaad RagabNo ratings yet
- LEP1301 - 01 Hooke's LawDocument5 pagesLEP1301 - 01 Hooke's LawDanilo SalcedoNo ratings yet
- Fracture Mechanics Syllabus PDFDocument4 pagesFracture Mechanics Syllabus PDFPaquita LonddonNo ratings yet
- Boundary Layer CorrectionDocument5 pagesBoundary Layer CorrectionmgskumarNo ratings yet
- TS21.C12.CT01 Consolidated Testst-1 24-04-2021Document10 pagesTS21.C12.CT01 Consolidated Testst-1 24-04-2021VaradaNo ratings yet
- Lecture 5Document45 pagesLecture 5RitikNo ratings yet
- FST 325 MID TEST Fluid Dynamics & Rheology ProblemsDocument2 pagesFST 325 MID TEST Fluid Dynamics & Rheology ProblemsSunmola AbidemiNo ratings yet
- Gujarat Technological University, Ahmedabad, Gujarat Course Curriculum Course Title: Strength of Material (Code: 3331904)Document6 pagesGujarat Technological University, Ahmedabad, Gujarat Course Curriculum Course Title: Strength of Material (Code: 3331904)Harshad JoshiNo ratings yet
- Experiment 5 Fluid Mechanics LABORATORY REPORT SHEETDocument8 pagesExperiment 5 Fluid Mechanics LABORATORY REPORT SHEETJayJay CruzNo ratings yet
- Drillstring Design ManualDocument23 pagesDrillstring Design ManualAdil Aytekin93% (14)
- ASTM D445-21 Standard Test Method For Kinematic Viscosity of Transparent and Opaque Liquids (And Calculation of Dynamic Viscosity)Document18 pagesASTM D445-21 Standard Test Method For Kinematic Viscosity of Transparent and Opaque Liquids (And Calculation of Dynamic Viscosity)MahammadNo ratings yet