You might also like
- Intro To StaticsDocument55 pagesIntro To StaticsTresor Mavinga Mvg94% (81)
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Vibration Analysis For Improving ReliabilityDocument67 pagesVibration Analysis For Improving ReliabilityDevasyruc100% (1)
- Lab 5 - Viscosity Measurement Via Falling Ball Method PDFDocument11 pagesLab 5 - Viscosity Measurement Via Falling Ball Method PDFrenel augustinNo ratings yet
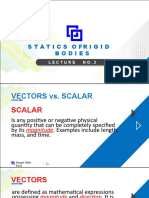
- Statics of Rigid Bodies Lecture on VectorsDocument27 pagesStatics of Rigid Bodies Lecture on VectorsAljun C MolijonNo ratings yet
- Statics: Alexandria Higher Institute of Engineering and TechnologyDocument24 pagesStatics: Alexandria Higher Institute of Engineering and Technologysameh tawfeekNo ratings yet
- VectorDocument22 pagesVectorMark RamosNo ratings yet
- شابتر 4Document82 pagesشابتر 4Feras ArafatNo ratings yet
- شابتر 3Document56 pagesشابتر 3Feras ArafatNo ratings yet
- شابتر 6Document36 pagesشابتر 6Feras ArafatNo ratings yet
- Lecture Notes On Statics of Rigid BodiesDocument184 pagesLecture Notes On Statics of Rigid BodiesLeandro S. DaceraNo ratings yet
- شابتر 5Document87 pagesشابتر 5Feras ArafatNo ratings yet
- Engineering Mechanics: 1 Concurrent Forces in A Plane 1.5 Equilibrium of Three Forces in A Plane 1.6 Method of MomentsDocument22 pagesEngineering Mechanics: 1 Concurrent Forces in A Plane 1.5 Equilibrium of Three Forces in A Plane 1.6 Method of MomentsSesha Sai KumarNo ratings yet
- 6-Moments Couples and Force Couple SystemsDocument69 pages6-Moments Couples and Force Couple SystemsJamal JalalaniNo ratings yet
- Chapter2 Part1Document25 pagesChapter2 Part1MohamaadNo ratings yet
- Lecture 2 EE1MECDocument30 pagesLecture 2 EE1MECsalemalbulushi123No ratings yet
- Statics of Rigid Bodies: Esci 123 - Engineering Mechanics 1Document24 pagesStatics of Rigid Bodies: Esci 123 - Engineering Mechanics 1Jeslyn MonteNo ratings yet
- ME2151 - Engineering Mechanics Unit1Document22 pagesME2151 - Engineering Mechanics Unit1dsathiyaNo ratings yet
- Mekanika Teknik PDFDocument141 pagesMekanika Teknik PDFAnonymous dSFbLxc9No ratings yet
- Engineering Mechanics: Scalars, VectorsDocument70 pagesEngineering Mechanics: Scalars, VectorsMuhammad FahadNo ratings yet
- Force Couple Moment SimplificationDocument37 pagesForce Couple Moment SimplificationLevi PogiNo ratings yet
- Vector Addition and Resultant ForcesDocument24 pagesVector Addition and Resultant ForcesM Jamshaid TahiriNo ratings yet
- Chapter 2pptDocument116 pagesChapter 2pptyohannes lemiNo ratings yet
- FORCE VECTORS & ADDITION OF COPLANAR FORCESDocument24 pagesFORCE VECTORS & ADDITION OF COPLANAR FORCESzakNo ratings yet
- Force Vectors: Dr. Mostafa ShazlyDocument24 pagesForce Vectors: Dr. Mostafa ShazlyzakNo ratings yet
- Course Outline: - Week 1, January 4 and 6Document23 pagesCourse Outline: - Week 1, January 4 and 6Michael DemianNo ratings yet
- For Module - 1 (Part 1) PDFDocument48 pagesFor Module - 1 (Part 1) PDFlakshmi aparna yelganamoniNo ratings yet
- Lecture 7-8 - Moments &couplesDocument37 pagesLecture 7-8 - Moments &couplesPritam KumarNo ratings yet
- Review X DOT X Resultant of ForcesDocument44 pagesReview X DOT X Resultant of ForcesJohn Jim Paul DunesNo ratings yet
- Force Vectors, Vector Operations & Addition Coplanar ForcesDocument20 pagesForce Vectors, Vector Operations & Addition Coplanar ForcesMia RismaliaNo ratings yet
- Chapter 2 Static of ParticlesDocument51 pagesChapter 2 Static of ParticlesRenu SekaranNo ratings yet
- Module 1Document45 pagesModule 1MD SHAHRIARMAHMUDNo ratings yet
- ME 1204: Engineering Statics: Dr. Faraz JunejoDocument86 pagesME 1204: Engineering Statics: Dr. Faraz JunejoTayabaNo ratings yet
- Rigid Body EQFMCSDocument63 pagesRigid Body EQFMCSNÏALNo ratings yet
- Variable Notes & Comments: Extended Base Dimension SystemDocument16 pagesVariable Notes & Comments: Extended Base Dimension SystemthimmarayaswamymNo ratings yet
- Force Vectors: Add and Resolve Coplanar ForcesDocument20 pagesForce Vectors: Add and Resolve Coplanar Forcesdanaluca2753No ratings yet
- National University Engineering Mechanics Statics Chapter 2 Force VectorsDocument23 pagesNational University Engineering Mechanics Statics Chapter 2 Force VectorsJack BravoNo ratings yet
- 2k15-ES Lec-5 3D Forces SystemDocument31 pages2k15-ES Lec-5 3D Forces SystemUsama KhanNo ratings yet
- With Respect To A Defined Reference FrameDocument17 pagesWith Respect To A Defined Reference FrameMd Yusuf AnsariNo ratings yet
- Moment 1Document7 pagesMoment 1flav kthNo ratings yet
- 2-Vector Operation and Force AnalysisDocument58 pages2-Vector Operation and Force AnalysisMel RSNo ratings yet
- VectorsDocument12 pagesVectorsTweakxorNo ratings yet
- Chapter 2 Force System by TeddyDocument66 pagesChapter 2 Force System by Teddytewodros aliNo ratings yet
- CH 4 Force System ResultantDocument50 pagesCH 4 Force System ResultantSyahrul Nizam AnuarNo ratings yet
- VectorDocument3 pagesVectorRohitNo ratings yet
- IE C1 Statics of Rigid Bodies Part 2 Force VectorsDocument13 pagesIE C1 Statics of Rigid Bodies Part 2 Force VectorsBernadeth MontardeNo ratings yet
- EE3301 Electromagnetic Fields Lecture Notes 1Document84 pagesEE3301 Electromagnetic Fields Lecture Notes 122ee26No ratings yet
- 6-Moments Couples and Force Couple Systems - PartbDocument39 pages6-Moments Couples and Force Couple Systems - PartbsaishvNo ratings yet
- Chap II - StaticsDocument41 pagesChap II - StaticsEnas Al-khawaldehNo ratings yet
- VectorDocument31 pagesVectorNahom AbebeNo ratings yet
- Chapter 2 Force SystemDocument45 pagesChapter 2 Force SystemeyuducNo ratings yet
- 5 External Reliability: Robustness Analysis Final ReportDocument23 pages5 External Reliability: Robustness Analysis Final ReportMul YaniNo ratings yet
- Sheet (3) Moment of F Abount Point 2D-3DDocument13 pagesSheet (3) Moment of F Abount Point 2D-3DSamir ZaghloolNo ratings yet
- g481 1 1 2 Scalars and VectorsDocument7 pagesg481 1 1 2 Scalars and Vectorsapi-236179294No ratings yet
- Lecture 7 - Equivalent Vectors Force and Its Characteristics Moment of A Force About A Point Moment of A Force About An Axis PDFDocument55 pagesLecture 7 - Equivalent Vectors Force and Its Characteristics Moment of A Force About A Point Moment of A Force About An Axis PDFMichael Jeawel AlabanNo ratings yet
- KR10203 Chapter 1Document64 pagesKR10203 Chapter 1RINA RINANo ratings yet
- Speed, Velocity and Acceleration - 1Document114 pagesSpeed, Velocity and Acceleration - 1qussai salahNo ratings yet
- Mathematical MethodDocument11 pagesMathematical MethodPrathmeshNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- شابتر 7Document29 pagesشابتر 7Feras ArafatNo ratings yet
- شابتر 6Document36 pagesشابتر 6Feras ArafatNo ratings yet
- شابتر 5Document87 pagesشابتر 5Feras ArafatNo ratings yet
- Statics-61110: Chapter (1) ChapterDocument23 pagesStatics-61110: Chapter (1) ChapterFeras ArafatNo ratings yet
- Notes On Beam Deflection ExperimentDocument6 pagesNotes On Beam Deflection ExperimentViccknesh BalakrishnanNo ratings yet
- Frame StiffnessDocument8 pagesFrame StiffnessFeras ArafatNo ratings yet
- A 1Document2 pagesA 1Feras ArafatNo ratings yet
- Ex6 Continuous Operation (Electro-Pneumatic) PDFDocument1 pageEx6 Continuous Operation (Electro-Pneumatic) PDFFeras ArafatNo ratings yet
- Ex8 Sequence Operation of Double-Acting P.C.A (Pneumatic Control) PDFDocument1 pageEx8 Sequence Operation of Double-Acting P.C.A (Pneumatic Control) PDFFeras ArafatNo ratings yet
- Ex9 Sequence Operation of Double-Acting P.C.A (Electrical Control) PDFDocument1 pageEx9 Sequence Operation of Double-Acting P.C.A (Electrical Control) PDFFeras ArafatNo ratings yet
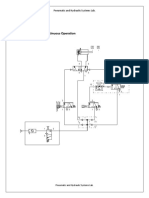
- Pneumatic and Hydraulic Lab Continuous Operation ExperimentDocument1 pagePneumatic and Hydraulic Lab Continuous Operation ExperimentFeras ArafatNo ratings yet
- Speed Control (Latching Relay Circuit) Experiment in Pneumatic and Hydraulic Systems LabDocument1 pageSpeed Control (Latching Relay Circuit) Experiment in Pneumatic and Hydraulic Systems LabFeras ArafatNo ratings yet
- Esr PDFDocument2 pagesEsr PDFBhabeshSarangiNo ratings yet
- Agma 927-A01 PDFDocument38 pagesAgma 927-A01 PDFRoro100% (1)
- Chapitre 18 Portiques BA-Exemple Calcul-Corr09Document87 pagesChapitre 18 Portiques BA-Exemple Calcul-Corr09Mohamed Bouzidi FSNo ratings yet
- 10 Exercise 5 Acceleration Analysis of MechanismsDocument5 pages10 Exercise 5 Acceleration Analysis of MechanismsMohamed MostafaNo ratings yet
- Pre Boundary ConditionsDocument40 pagesPre Boundary ConditionsJenny AltorsNo ratings yet
- 2011 A Novel Punch Design Approach With ProgressiveDocument9 pages2011 A Novel Punch Design Approach With ProgressivesudhakarNo ratings yet
- Rigid Frame Structural Analysis and DesignDocument9 pagesRigid Frame Structural Analysis and DesignFatima Khalid100% (1)
- Ring on Rails Speed CalculationDocument3 pagesRing on Rails Speed CalculationPeter JonesNo ratings yet
- IIT-JAM 2018 Physics QuestionsDocument14 pagesIIT-JAM 2018 Physics Questionsrupesh sahuNo ratings yet
- Altoubat - Early Age Stresses and Creep-Shrinkage Interaction of Restrained Concrete THESISDocument244 pagesAltoubat - Early Age Stresses and Creep-Shrinkage Interaction of Restrained Concrete THESISJohn Van RooyenNo ratings yet
- Assessment of RC Residential Frames in Kathmandu Under Earthquake LoadingDocument9 pagesAssessment of RC Residential Frames in Kathmandu Under Earthquake LoadingTaulantKarriqiNo ratings yet
- Chapter 7 - System ResponseDocument36 pagesChapter 7 - System Responseminh nguyenNo ratings yet
- VRA V422 v2 Belastning (Pub) .Da - enDocument70 pagesVRA V422 v2 Belastning (Pub) .Da - enFerdie TolosaNo ratings yet
- Thermodynamics 1 - Properties of Pure SubstancesDocument26 pagesThermodynamics 1 - Properties of Pure SubstancesFlorasaurus1767% (3)
- CE 241 Materials Science: Properties Related To StrengthDocument33 pagesCE 241 Materials Science: Properties Related To StrengthEmre UgurNo ratings yet
- High-Force Dynamic Mechanical Analysis (DMA) : Dynamic Characterization of Viscoelastic MaterialsDocument12 pagesHigh-Force Dynamic Mechanical Analysis (DMA) : Dynamic Characterization of Viscoelastic MaterialsDavid SimangunsongNo ratings yet
- Manual Solution Fundamentals Cosmology RichDocument43 pagesManual Solution Fundamentals Cosmology Richrscaraca100% (1)
- Kicking Action of SoccerDocument17 pagesKicking Action of SoccerM.AhsanNo ratings yet
- Lecture 01Document19 pagesLecture 01happydocNo ratings yet
- Magnetism and Matter Lect-02 Notes - Notes 02ch05Document24 pagesMagnetism and Matter Lect-02 Notes - Notes 02ch05Lovely yadavNo ratings yet
- ME4255 Materials Failure Exam FeedbackDocument5 pagesME4255 Materials Failure Exam FeedbackWai-Yen ChanNo ratings yet
- Ethiopia's Harmonized Physics CurriculumDocument180 pagesEthiopia's Harmonized Physics CurriculumBms AgNo ratings yet
- 33 - India - Connecting Rod AnalisysDocument7 pages33 - India - Connecting Rod AnalisysBima SorayaNo ratings yet
- Numerical Investigation of The Infill-Induced Short Column Effect in Reinforced Concrete FramesDocument12 pagesNumerical Investigation of The Infill-Induced Short Column Effect in Reinforced Concrete FramesAndy OretaNo ratings yet
- System of Coplanar ForcesDocument18 pagesSystem of Coplanar Forceschandan_j4u100% (1)
- 1999 - Blasco - Flash Drying of Fish Meals With Superheated Stem Isothermal ProcessDocument17 pages1999 - Blasco - Flash Drying of Fish Meals With Superheated Stem Isothermal ProcessGuilherme Venturi RonchiNo ratings yet
- HPH103 - Waves and Optics 1 - Lecture # 8-1Document31 pagesHPH103 - Waves and Optics 1 - Lecture # 8-1Praise NehumambiNo ratings yet
- Supplementary Information A.: A.1. Overview of Elements Used in Structural and Acoustic CalculationsDocument11 pagesSupplementary Information A.: A.1. Overview of Elements Used in Structural and Acoustic CalculationsDanNo ratings yet