You might also like
- Chapter2 Part1Document25 pagesChapter2 Part1MohamaadNo ratings yet
- 2-Vector Operation and Force AnalysisDocument58 pages2-Vector Operation and Force AnalysisMel RSNo ratings yet
- Lecture Notes On Statics of Rigid BodiesDocument184 pagesLecture Notes On Statics of Rigid BodiesLeandro S. DaceraNo ratings yet
- Force Vectors: Dr. Mostafa ShazlyDocument24 pagesForce Vectors: Dr. Mostafa ShazlyzakNo ratings yet
- FORCE VECTORS & ADDITION OF COPLANAR FORCESDocument24 pagesFORCE VECTORS & ADDITION OF COPLANAR FORCESzakNo ratings yet
- Engineering Mechanics: StaticsDocument23 pagesEngineering Mechanics: Staticsismail ibrahimNo ratings yet
- S - Kuliah02-Forceinaplane2d 3Document37 pagesS - Kuliah02-Forceinaplane2d 3MD MotoVlogNo ratings yet
- Statics Chapter 2Document18 pagesStatics Chapter 2Karl KronosNo ratings yet
- S Kuliah02 1forcein2dDocument34 pagesS Kuliah02 1forcein2dMuhammad Fekrie Bin SarudinNo ratings yet
- Vector Addition and Resultant ForcesDocument24 pagesVector Addition and Resultant ForcesM Jamshaid TahiriNo ratings yet
- IE C1 Statics of Rigid Bodies Part 2 Force VectorsDocument13 pagesIE C1 Statics of Rigid Bodies Part 2 Force VectorsBernadeth MontardeNo ratings yet
- 01 VectorsDocument49 pages01 VectorsZohaib IkramNo ratings yet
- Lecture 2 EE1MECDocument30 pagesLecture 2 EE1MECsalemalbulushi123No ratings yet
- Mechanics: Study of What Happens To A "Thing" (The Technical Name Is "Body") When FORCES Are Applied To ItDocument39 pagesMechanics: Study of What Happens To A "Thing" (The Technical Name Is "Body") When FORCES Are Applied To Itdinosaur x-drakeNo ratings yet
- Force Vectors, Vector Operations & Addition Coplanar Forces: Today's ObjectiveDocument21 pagesForce Vectors, Vector Operations & Addition Coplanar Forces: Today's ObjectiveIsmailNo ratings yet
- ETU Engineering Mechanics I 1 To 8Document184 pagesETU Engineering Mechanics I 1 To 8AidanNo ratings yet
- UNIT 1-PHY 131 Chapter 2 - Introduction To VectorsDocument35 pagesUNIT 1-PHY 131 Chapter 2 - Introduction To VectorscharlieNo ratings yet
- Jinka University Physics Module Provides Foundation in Key ConceptsDocument125 pagesJinka University Physics Module Provides Foundation in Key ConceptsBelete Degu100% (3)
- CHAPTER 2 FORCE VECTOR (Mechanic)Document41 pagesCHAPTER 2 FORCE VECTOR (Mechanic)Afiq NajmiNo ratings yet
- Statics - Chapter 2 PRT 1Document43 pagesStatics - Chapter 2 PRT 1Mu'adzAzriNo ratings yet
- Scalars and Vectors: ScalarDocument22 pagesScalars and Vectors: Scalarsuwilanji kawambaleNo ratings yet
- (Applied Mechanics) Chapter 1 - Static in ParticlesDocument60 pages(Applied Mechanics) Chapter 1 - Static in Particlesafiq danialNo ratings yet
- With Respect To A Defined Reference FrameDocument17 pagesWith Respect To A Defined Reference FrameMd Yusuf AnsariNo ratings yet
- Lecture Notes For Sections 2 - 1 2-2 2 - 4Document21 pagesLecture Notes For Sections 2 - 1 2-2 2 - 4Hani BanatNo ratings yet
- Statics Mechanics GuideDocument210 pagesStatics Mechanics Guideabdul khader100% (1)
- Matrix Algebra For Beginners, Part II Linear Transformations, Eigenvectors and EigenvaluesDocument16 pagesMatrix Algebra For Beginners, Part II Linear Transformations, Eigenvectors and EigenvaluesPhine-hasNo ratings yet
- APPLICATION OF VECTOR ADDITIONDocument37 pagesAPPLICATION OF VECTOR ADDITIONSaleh LafiNo ratings yet
- Vectors: Sunil Kumar SinghDocument12 pagesVectors: Sunil Kumar SinghImranNo ratings yet
- Vectors and Forces ExplainedDocument24 pagesVectors and Forces ExplainedZohebCurrimbhoy0% (1)
- KR10203 Chapter 1Document64 pagesKR10203 Chapter 1RINA RINANo ratings yet
- Statics - Lecture 02 - Force VectorsDocument24 pagesStatics - Lecture 02 - Force VectorsyuyuNo ratings yet
- INFORME 8 Física MecánicaDocument18 pagesINFORME 8 Física Mecánicabecsan57No ratings yet
- Force Vectors, Vector Operations & Addition Coplanar Forces: Today's ObjectiveDocument24 pagesForce Vectors, Vector Operations & Addition Coplanar Forces: Today's ObjectiveMiray KoçakNo ratings yet
- Statics of Rigid Bodies Lecture on VectorsDocument27 pagesStatics of Rigid Bodies Lecture on VectorsAljun C MolijonNo ratings yet
- Vectors and Scalar Quantities: Chapter ObjectivesDocument56 pagesVectors and Scalar Quantities: Chapter ObjectivesLionel MessiNo ratings yet
- Force Vectors: Add and Resolve Coplanar ForcesDocument20 pagesForce Vectors: Add and Resolve Coplanar Forcesdanaluca2753No ratings yet
- Statics of Rigid Bodies: Esci 123 - Engineering Mechanics 1Document24 pagesStatics of Rigid Bodies: Esci 123 - Engineering Mechanics 1Jeslyn MonteNo ratings yet
- Topic 2. Force VectorDocument18 pagesTopic 2. Force VectorArnold Apostol Jr.No ratings yet
- ch2 Force Vectors'Document37 pagesch2 Force Vectors'Laith JaberNo ratings yet
- Physics: Senior Secondary SchoolDocument65 pagesPhysics: Senior Secondary SchoolHASSAN OLUMIDENo ratings yet
- محاضرة 2-1Document39 pagesمحاضرة 2-1OmaNo ratings yet
- Course Outline: - Week 1, January 4 and 6Document23 pagesCourse Outline: - Week 1, January 4 and 6Michael DemianNo ratings yet
- Learner Support Grade 11 For 2021 1Document73 pagesLearner Support Grade 11 For 2021 1Joyce ChikwaNo ratings yet
- Engineering Mechanics Force Vectors Lecture 1Document47 pagesEngineering Mechanics Force Vectors Lecture 1Zoyjoy OmpocNo ratings yet
- Force Vectors, Vector Operations & Addition Coplanar ForcesDocument20 pagesForce Vectors, Vector Operations & Addition Coplanar ForcesMia RismaliaNo ratings yet
- Physics 11th Unit 2 KinematicsDocument31 pagesPhysics 11th Unit 2 Kinematicsvisiblemotivation7No ratings yet
- Physics VectorsDocument4 pagesPhysics VectorsAra Nicole BarcenasNo ratings yet
- 02 Me1 PDFDocument5 pages02 Me1 PDFvat007No ratings yet
- Development of Truss Equation: Finite Element MethodDocument5 pagesDevelopment of Truss Equation: Finite Element MethodMeity WulandariNo ratings yet
- Force VectorDocument47 pagesForce Vectoradeliene 25No ratings yet
- Lecture 2 (Chapter 2)Document22 pagesLecture 2 (Chapter 2)Adam SurtiNo ratings yet
- CHAPTER 2 - Forces and EquilibriumDocument53 pagesCHAPTER 2 - Forces and EquilibriumLin YanNo ratings yet
- Activity 2.1.4 Calculating Force Vectors Answer Key: Precision of 0.0)Document4 pagesActivity 2.1.4 Calculating Force Vectors Answer Key: Precision of 0.0)Kodjovi AvouleteNo ratings yet
- g481 1 1 2 Scalars and VectorsDocument7 pagesg481 1 1 2 Scalars and Vectorsapi-236179294No ratings yet
- Force Vectors, Vector Operations & Addition of Forces 2D & 3DDocument51 pagesForce Vectors, Vector Operations & Addition of Forces 2D & 3DparklNo ratings yet
- Physic - 3Document57 pagesPhysic - 3Aj EstoleNo ratings yet
- Vectors and Dirac Delta FunctionDocument39 pagesVectors and Dirac Delta FunctionSubrata RakshitNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- ENT Syllabus OHT-1Document146 pagesENT Syllabus OHT-1Jack BravoNo ratings yet
- Syllabus PDFDocument150 pagesSyllabus PDFAsma SethiNo ratings yet
- Elements of Logical ReasoningDocument276 pagesElements of Logical ReasoningAbdul WahabNo ratings yet
- Business Model CanvasDocument71 pagesBusiness Model CanvasJack BravoNo ratings yet
- Business Model CanvasDocument39 pagesBusiness Model CanvasRahman Rhay Hidajat100% (5)
- Difference Between Entrepreneurship and BusinessDocument3 pagesDifference Between Entrepreneurship and BusinessJack BravoNo ratings yet
- Danish GuideDocument95 pagesDanish GuideJack BravoNo ratings yet
- 365 Stories 2Document184 pages365 Stories 2Jack BravoNo ratings yet
- Chapter 8 Differential and Multistage AmplifiersDocument38 pagesChapter 8 Differential and Multistage AmplifiersJack BravoNo ratings yet
- Danish English A, N, ODocument8 pagesDanish English A, N, OJack BravoNo ratings yet
- CAG Lec. Rates and Related Rates of Change (Ibrar)Document15 pagesCAG Lec. Rates and Related Rates of Change (Ibrar)Jack BravoNo ratings yet
- EM Lec. 01 Chapter-1Document23 pagesEM Lec. 01 Chapter-1Jack BravoNo ratings yet
- Mazoon's Resume Updated PDFDocument1 pageMazoon's Resume Updated PDFJack BravoNo ratings yet
- AEE 211-Chapter 01-Rev 1Document66 pagesAEE 211-Chapter 01-Rev 1AlexanderNo ratings yet
- IntegratorDocument3 pagesIntegratortapan_dassNo ratings yet
- Adaptive Control Introduction Overview ApplicationsDocument185 pagesAdaptive Control Introduction Overview ApplicationsTu DuongNo ratings yet
- Full Mock-3 Olevel-Paper-4 Final SourceDocument10 pagesFull Mock-3 Olevel-Paper-4 Final SourceDewan Olin ChotepadaeNo ratings yet
- QTMD Pre-Session AssignmentDocument12 pagesQTMD Pre-Session AssignmentshrizanaNo ratings yet
- Shs Genmath Module 8 Core Revised DuenasDocument42 pagesShs Genmath Module 8 Core Revised DuenasAPRIL JOY ARREOLANo ratings yet
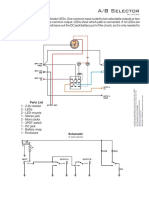
- A/B Selector: Parts ListDocument1 pageA/B Selector: Parts ListGiannis zmNo ratings yet
- 330D System Operation Machine Electronic Control System PDFDocument64 pages330D System Operation Machine Electronic Control System PDFDANIEL VARGAS RODRIGUEZ60% (5)
- Object Oriented Programming With C July 2008 OldDocument1 pageObject Oriented Programming With C July 2008 OldPrasad C MNo ratings yet
- Accounting Management SystemDocument64 pagesAccounting Management Systemnilesh50% (2)
- T. Balendra BSC (Eng), PHD, CEng (Auth.) - Vibration of Buildings To Wind and Earthquake Loads-Springer-Verlag London (1993) PDFDocument155 pagesT. Balendra BSC (Eng), PHD, CEng (Auth.) - Vibration of Buildings To Wind and Earthquake Loads-Springer-Verlag London (1993) PDFJesus OrtizNo ratings yet
- Zapata MATHCADDocument22 pagesZapata MATHCADGonzalo Ale Olave A.No ratings yet
- Math Cheat SheetDocument33 pagesMath Cheat SheetSanjeevG100% (6)
- RecoverPoint With SRMDocument63 pagesRecoverPoint With SRMhemanth-07No ratings yet
- GOS4 ch03 SolutionsDocument11 pagesGOS4 ch03 SolutionsPrathamesh DalviNo ratings yet
- Laguna Kosmetik MC1 PlusDocument2 pagesLaguna Kosmetik MC1 PlusLaguna Karaoke TarakanNo ratings yet
- Electrical network management with MV substation control and Modbus communicationDocument45 pagesElectrical network management with MV substation control and Modbus communicationMaximiliano SanchezNo ratings yet
- ACE Brochure - Final - June - 4 - 2013 PDFDocument16 pagesACE Brochure - Final - June - 4 - 2013 PDFOrlando FloresNo ratings yet
- Design PrimerDocument35 pagesDesign PrimerShafira Nurianti salimNo ratings yet
- Agile Testing Methods Guide: Scrum, Crystal, DSDM, FDD, Lean, XP & MoreDocument19 pagesAgile Testing Methods Guide: Scrum, Crystal, DSDM, FDD, Lean, XP & Moreangelica campuedNo ratings yet
- Parts Catalog - HITECH.2020Document36 pagesParts Catalog - HITECH.2020Nataly007No ratings yet
- British Royal Yachts Historical BackgroundDocument9 pagesBritish Royal Yachts Historical BackgroundFelipe Andrés Reinal AranedaNo ratings yet
- Unit 1 AP Classroom PDFDocument9 pagesUnit 1 AP Classroom PDFSara AbdelazizNo ratings yet
- Android KMSGDocument62 pagesAndroid KMSGraimanalmughnii67No ratings yet
- C 78 - 94 QZC4LTK0Document3 pagesC 78 - 94 QZC4LTK0Rufo CascoNo ratings yet
- Using A Scientific Journal Article To Write A Critical ReviewDocument6 pagesUsing A Scientific Journal Article To Write A Critical ReviewJaime Martinez100% (1)
- Massachusetts Institute of Technology: Database Systems: Fall 2008 Quiz IIDocument12 pagesMassachusetts Institute of Technology: Database Systems: Fall 2008 Quiz IIigoginNo ratings yet
- Manual de Servicio Jac 5 InglésDocument375 pagesManual de Servicio Jac 5 InglésJT Pe100% (1)
- Insulated Pipe ClampsDocument17 pagesInsulated Pipe ClampsKarun NayyarNo ratings yet
- What Is A 25V 70V or 100V Speaker SystemDocument10 pagesWhat Is A 25V 70V or 100V Speaker Systemwkchow1962No ratings yet