You might also like
- 9781523506897Document257 pages9781523506897Dyazhelle Pacalang100% (5)
- SolutionDocument12 pagesSolutionlathikaNo ratings yet
- String Similarity Search: A Hash-Based Approach: Hao Wei, Jeffrey Xu Yu, and Can LuDocument14 pagesString Similarity Search: A Hash-Based Approach: Hao Wei, Jeffrey Xu Yu, and Can LuKrishna KumarNo ratings yet
- Tutorial Excel SolverDocument5 pagesTutorial Excel SolverwilsongouveiaNo ratings yet
- Chapter 2 Mathematical Modeling of Dynamic SystemDocument56 pagesChapter 2 Mathematical Modeling of Dynamic SystemAmanuel AsfawNo ratings yet
- Sistem Kendali: Week 1 Session 3Document15 pagesSistem Kendali: Week 1 Session 3mikhaelNo ratings yet
- EE5205 Control System DesignDocument44 pagesEE5205 Control System DesignntbandaraNo ratings yet
- Lecturer Two Summary Transfer Function of Physical SystemDocument5 pagesLecturer Two Summary Transfer Function of Physical SystemLiezel HenwoodNo ratings yet
- 505-Lec 08 PDFDocument10 pages505-Lec 08 PDFUdara DissanayakeNo ratings yet
- FEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Document36 pagesFEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Junaid YNo ratings yet
- Control System Engineering PPT by ShemsudinDocument42 pagesControl System Engineering PPT by ShemsudinShemsudin AhmedteibNo ratings yet
- Topic 2. Matemethical Modelling of Control Systems V1Document13 pagesTopic 2. Matemethical Modelling of Control Systems V1xREDCivicCometxNo ratings yet
- Lecture 4 Mathematical Modelling of Transfer Functions (Autosaved)Document19 pagesLecture 4 Mathematical Modelling of Transfer Functions (Autosaved)Kabo MphanyaneNo ratings yet
- Transfer Function & Block Diagram Algebra: M. Azharul Haque Dept. of EEE PAUDocument69 pagesTransfer Function & Block Diagram Algebra: M. Azharul Haque Dept. of EEE PAUShazidNo ratings yet
- Week 12.1Document14 pagesWeek 12.1Faizan RehmanNo ratings yet
- Lecture 1Document59 pagesLecture 1iptradersNo ratings yet
- Control SystemsDocument28 pagesControl SystemsMadhuri PotluriNo ratings yet
- Matlab and Simulink For Control SystemDocument35 pagesMatlab and Simulink For Control SystemLakshmiNo ratings yet
- Control System LP 3Document13 pagesControl System LP 3Neans PlanterasNo ratings yet
- Unit-1 Control System Analysis and ComponentsDocument10 pagesUnit-1 Control System Analysis and ComponentsBrooke HollandNo ratings yet
- Lecture 2Document52 pagesLecture 2faruktokuslu16No ratings yet
- TOPIC 3 - Control-EngineeringDocument35 pagesTOPIC 3 - Control-EngineeringCllyan ReyesNo ratings yet
- IntroDocument2 pagesIntroJoe Marie ValcarcelNo ratings yet
- ME326L BlockdiagramDocument30 pagesME326L BlockdiagramJam Maica TuboNo ratings yet
- Control SystemsDocument8 pagesControl Systemsmohammed zaidNo ratings yet
- TRN4507 3.1Document44 pagesTRN4507 3.1cyruswan156No ratings yet
- Control SystemsDocument32 pagesControl Systemsselvi0412100% (1)
- Mathematical Modeling of Control SystemDocument31 pagesMathematical Modeling of Control SystemMegiNo ratings yet
- Presentation 1Document28 pagesPresentation 1Sithy JuhaniyaNo ratings yet
- Lab 05Document10 pagesLab 05Saad mubeenNo ratings yet
- ELM 322, Control Systems Control Systems Spring 2015Document37 pagesELM 322, Control Systems Control Systems Spring 2015kaanNo ratings yet
- Feedback Lesson 5Document2 pagesFeedback Lesson 5Neo BataclanNo ratings yet
- Unit 1 State SpaceDocument57 pagesUnit 1 State SpaceJoseph AgboglaNo ratings yet
- ME330- spring-2022 Part 1 فصل الربيع 2022Document41 pagesME330- spring-2022 Part 1 فصل الربيع 2022saad SdNo ratings yet
- 1 Class (04-02-2021) : 1. What Is Block Diagram? 2. What Is Summing Junction?Document25 pages1 Class (04-02-2021) : 1. What Is Block Diagram? 2. What Is Summing Junction?Md.Atikur RahmanNo ratings yet
- Week 005 Block Diagram of Control SystemDocument20 pagesWeek 005 Block Diagram of Control SystemDiane GutierrezNo ratings yet
- Biological Control Systems: Biomedical Engineering - Bcs - Short Questions and AnswersDocument15 pagesBiological Control Systems: Biomedical Engineering - Bcs - Short Questions and AnswersNoor AhmedNo ratings yet
- Cpp111-Module 6Document7 pagesCpp111-Module 6buscainojed078No ratings yet
- EC2255 Controls Systems 2marks With Answers (Sem4)Document39 pagesEC2255 Controls Systems 2marks With Answers (Sem4)lvrevathiNo ratings yet
- Automated Control Unit LLDocument5 pagesAutomated Control Unit LLRakgnar LodbrokNo ratings yet
- Chapter 1 - Transfer FunctionDocument52 pagesChapter 1 - Transfer FunctionNahome NigussieNo ratings yet
- 6EC5 Control SystemUnit 1 Notes Updated Upto 10122012 - Shilpi LavaniaDocument23 pages6EC5 Control SystemUnit 1 Notes Updated Upto 10122012 - Shilpi LavaniaSona LavaniaNo ratings yet
- Lab3 2Document49 pagesLab3 2علاء الدين العولقيNo ratings yet
- Ec2255 - Control SystemDocument42 pagesEc2255 - Control Systemselvi0412No ratings yet
- Chapter - 2 - Mathematical Models of Systems - W2015Document75 pagesChapter - 2 - Mathematical Models of Systems - W2015120200421003nNo ratings yet
- Module 2 Controls PDFDocument24 pagesModule 2 Controls PDFPrincess LutivaNo ratings yet
- Control Systems NotesDocument152 pagesControl Systems Notesdarlachantisaideepthi450No ratings yet
- Block Reduction and Masons Rule - 1Document52 pagesBlock Reduction and Masons Rule - 1dedekNo ratings yet
- Lecture 1Document19 pagesLecture 1FarooqNo ratings yet
- Control System Engineering 2 MarksDocument18 pagesControl System Engineering 2 MarksSeenu CnuNo ratings yet
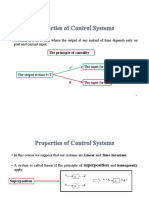
- A Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of CausalityDocument11 pagesA Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of Causalitygamer manNo ratings yet
- Unit 5 - Instrumentation and ControlDocument12 pagesUnit 5 - Instrumentation and ControlKalakriti IITINo ratings yet
- Topic 1: Introduction To Control System and Mathematical ReviewDocument43 pagesTopic 1: Introduction To Control System and Mathematical ReviewFaez FeakryNo ratings yet
- Reduction of Multiple SubsystemsDocument29 pagesReduction of Multiple SubsystemsKez BeatingNo ratings yet
- FCS Lab-1Document46 pagesFCS Lab-1muhammadNo ratings yet
- Control Systems: Module: Modelling of SystemsDocument19 pagesControl Systems: Module: Modelling of Systemsee210002004No ratings yet
- FIR System RealizationDocument17 pagesFIR System RealizationJagdeep RahulNo ratings yet
- Regulation & Control Ppt-1Document55 pagesRegulation & Control Ppt-1tadiwosNo ratings yet
- Slide 2Document89 pagesSlide 2EnesVSNo ratings yet
- Introduction To Block DiagramDocument47 pagesIntroduction To Block DiagramAini SalwaNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsFrom EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsNo ratings yet
- An Eagle FlightDocument403 pagesAn Eagle FlightWinter SyNo ratings yet
- Differential Amplifiers Operational Amplifiers: University of Southern MindanaoDocument40 pagesDifferential Amplifiers Operational Amplifiers: University of Southern MindanaoDyazhelle PacalangNo ratings yet
- ActivitiesDocument1 pageActivitiesDyazhelle PacalangNo ratings yet
- Dsa CheatsheetDocument28 pagesDsa CheatsheetRAJAN DUTTANo ratings yet
- Numerical DifferentiationDocument3 pagesNumerical DifferentiationGustavo LibotteNo ratings yet
- Human Activity RecognizationDocument80 pagesHuman Activity Recognizationbishesh905No ratings yet
- 5.13 Rational Chebyshev Approximation: Evaluation of FunctionsDocument5 pages5.13 Rational Chebyshev Approximation: Evaluation of FunctionsVinay GuptaNo ratings yet
- Ieee 2022-23 AggricultureDocument3 pagesIeee 2022-23 AggricultureNexgen TechnologyNo ratings yet
- Multivariable System With Level ControlDocument9 pagesMultivariable System With Level ControlkarthikeyanNo ratings yet
- Growth Factor Methods SeeeDocument3 pagesGrowth Factor Methods SeeeRajesh KhadkaNo ratings yet
- Aliaksei Maistrou - Finite Element Method DemystifiedDocument26 pagesAliaksei Maistrou - Finite Element Method DemystifiedsuyogbhaveNo ratings yet
- Gain Margin, Phase Margin, and Crossover Frequencies - MATLAB MarginDocument3 pagesGain Margin, Phase Margin, and Crossover Frequencies - MATLAB Margintipo_de_incognitoNo ratings yet
- Neural Architecture Search For Skin Lesion ClassificationDocument11 pagesNeural Architecture Search For Skin Lesion Classificationz123No ratings yet
- Title: Business Intelligence Mini Project Problem DefinitionDocument10 pagesTitle: Business Intelligence Mini Project Problem DefinitionRecaroNo ratings yet
- Phase Stability Analysis of Liquid Liquid EquilibriumDocument15 pagesPhase Stability Analysis of Liquid Liquid EquilibriumJosemarPereiradaSilvaNo ratings yet
- Quasi-Cyclic LDPC Codes For Fast EncodingDocument8 pagesQuasi-Cyclic LDPC Codes For Fast EncodingMamour BaNo ratings yet
- Crypto 2Document1,158 pagesCrypto 2ErcümentNo ratings yet
- Clustering AssignmentDocument10 pagesClustering Assignmentsourav.sur.eeNo ratings yet
- Problem Set 2Document4 pagesProblem Set 2dianazokhrabekova100% (1)
- X X X X X XDocument2 pagesX X X X X XRaj ShettyNo ratings yet
- Skogestad Simple Pid Tuning RulesDocument27 pagesSkogestad Simple Pid Tuning Rulesstathiss11No ratings yet
- Shanon HartleyDocument5 pagesShanon Hartleynlb53No ratings yet
- Predicting Short-Term Stock Prices Using Ensemble Methods and Online Data SourcesDocument39 pagesPredicting Short-Term Stock Prices Using Ensemble Methods and Online Data SourcesCNTT-1C-17 Vương Thị Diệu LinhNo ratings yet
- Adaptive Segmentation Algorithm Based On Level Set Model in Medical ImagingDocument9 pagesAdaptive Segmentation Algorithm Based On Level Set Model in Medical ImagingTELKOMNIKANo ratings yet
- Daa MCQDocument3 pagesDaa MCQLinkeshwar LeeNo ratings yet
- Decision Theory-Risk and UncertainityDocument11 pagesDecision Theory-Risk and UncertainityGurleen BajwaNo ratings yet
- Tutorial Sheet #2: Random Variables and Probability Distributions Question: #1 Tutorial Day and Time: ThursadysDocument3 pagesTutorial Sheet #2: Random Variables and Probability Distributions Question: #1 Tutorial Day and Time: Thursadysrahvin harveyNo ratings yet
- 6.006 Introduction To Algorithms: Mit OpencoursewareDocument7 pages6.006 Introduction To Algorithms: Mit Opencoursewareraw.junkNo ratings yet
- Compound Interest TablesDocument28 pagesCompound Interest TablesDoha anaNo ratings yet
- Teach Yourself Computer ScienceDocument18 pagesTeach Yourself Computer SciencesuryaNo ratings yet
- FRA Business ReportDocument21 pagesFRA Business ReportSurabhi KulkarniNo ratings yet