You might also like
- (David Crolla - Behrooz Mashadi) Vehicle Powertrain Systems-Integration and Optimization - Solution ManualDocument256 pages(David Crolla - Behrooz Mashadi) Vehicle Powertrain Systems-Integration and Optimization - Solution Manualsadegh_199067% (3)
- ME5361 Advanced Computational Fluid Dynamics Exam QuestionsDocument8 pagesME5361 Advanced Computational Fluid Dynamics Exam QuestionsbrugelionNo ratings yet
- Kinematic ch3 Solution (John J. Uicker)Document85 pagesKinematic ch3 Solution (John J. Uicker)박종국No ratings yet
- Design of Variable Coupler Curve Four-Bar Mechanisms: Ren-Chung Soong and Sun-Li WuDocument9 pagesDesign of Variable Coupler Curve Four-Bar Mechanisms: Ren-Chung Soong and Sun-Li WuAshokNo ratings yet
- Tutorial 1Document6 pagesTutorial 1w_ramirez94No ratings yet
- Review SynthesisDocument11 pagesReview Synthesissam hamNo ratings yet
- Optimal Synthesis of A Single-Dwell 6-Bar Planar LinkageDocument7 pagesOptimal Synthesis of A Single-Dwell 6-Bar Planar LinkageInternational Journal of computational Engineering research (IJCER)No ratings yet
- 1406 Advanced Kinematics and Dynamics of MachineryDocument13 pages1406 Advanced Kinematics and Dynamics of MachineryChiranjeev JainNo ratings yet
- Theory of MachinesDocument275 pagesTheory of MachinesMehul MunshiNo ratings yet
- A New Approach Towards The Synthesis of Six-Bar Double Dwell MechanismsDocument9 pagesA New Approach Towards The Synthesis of Six-Bar Double Dwell Mechanismsanon_830784355No ratings yet
- Winder and Unwinder Scheduling EquationsDocument13 pagesWinder and Unwinder Scheduling EquationsRoberto BarbozaNo ratings yet
- Lec4 - Graphical Linkage SynthesisDocument27 pagesLec4 - Graphical Linkage SynthesisTheodore BaaNo ratings yet
- R7220302 Kinematics of MachineryDocument2 pagesR7220302 Kinematics of MachinerysivabharathamurthyNo ratings yet
- Theory of Machines & Machine DesignDocument3 pagesTheory of Machines & Machine DesignAvilash JainNo ratings yet
- Kinematics Text Ch. 5 & 6Document145 pagesKinematics Text Ch. 5 & 6ClearMind84No ratings yet
- Simulation Of Four-Bar Function Generator Mechanism SoftwareDocument8 pagesSimulation Of Four-Bar Function Generator Mechanism SoftwaredharamuuNo ratings yet
- HA Questions PDFDocument13 pagesHA Questions PDFShardul DeolankarNo ratings yet
- From Tread Design to Stiffness MatricesDocument15 pagesFrom Tread Design to Stiffness MatricessiritapeNo ratings yet
- Design Problem 1Document5 pagesDesign Problem 196grandNo ratings yet
- Assig3 16Document2 pagesAssig3 16usama.mNo ratings yet
- Final Form 2 373Document12 pagesFinal Form 2 373Abood RainNo ratings yet
- Effect of Geometry On Thermoelastic Instability in Disk Brakes and ClutchesDocument6 pagesEffect of Geometry On Thermoelastic Instability in Disk Brakes and ClutchesvijaykrbNo ratings yet
- Nasa Rotor67Document12 pagesNasa Rotor67prakulmittal2No ratings yet
- 57 07-05-21 Isaif8 0021-ChenDocument10 pages57 07-05-21 Isaif8 0021-ChenEslam NagyNo ratings yet
- Design Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationFrom EverandDesign Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationNo ratings yet
- Unfinalized ReportDocument11 pagesUnfinalized Reportapi-286690470No ratings yet
- Electronics: A New Seven-Segment Profile Algorithm For An Open Source Architecture in A Hybrid Electronic PlatformDocument18 pagesElectronics: A New Seven-Segment Profile Algorithm For An Open Source Architecture in A Hybrid Electronic Platformpatrickcjh5236No ratings yet
- Quick Return ReportDocument8 pagesQuick Return ReportLuis Alfredo Alcantara BatistaNo ratings yet
- Mechanism Final ProjectDocument14 pagesMechanism Final Projectsundari_murali100% (2)
- Tarea 2. Design - of - Machinery NortonDocument10 pagesTarea 2. Design - of - Machinery Nortonbisiosote100% (1)
- The Prediction of Conveyor Trajectories: DB Hastie and PW WypychDocument16 pagesThe Prediction of Conveyor Trajectories: DB Hastie and PW Wypych86babuNo ratings yet
- Modal Analysis of Transmission Line CablesDocument4 pagesModal Analysis of Transmission Line CablesGogyNo ratings yet
- P0666Document3 pagesP0666Ramalho12345No ratings yet
- TOM IES GATE IAS 20 Years Question and Answers by S K MondalDocument275 pagesTOM IES GATE IAS 20 Years Question and Answers by S K Mondalkec.abhishek46380% (5)
- Machine dynamic 2 tutorial problemsDocument3 pagesMachine dynamic 2 tutorial problemsDestiny Cheun YeeNo ratings yet
- Building Blocks of MachineDocument7 pagesBuilding Blocks of MachineDeepak SahNo ratings yet
- Me352 E1 Fa2009 SolDocument21 pagesMe352 E1 Fa2009 SolSteve KrodaNo ratings yet
- Tutorial: Partially Premixed Combustion in A Co-Axial CombustorDocument13 pagesTutorial: Partially Premixed Combustion in A Co-Axial CombustorGaurav SinglaNo ratings yet
- Developing Steady-State Cornering CFD SimulationsDocument11 pagesDeveloping Steady-State Cornering CFD SimulationsKiệt LêNo ratings yet
- MECH3030 Homework #1 ProblemsDocument2 pagesMECH3030 Homework #1 Problemsanon_342287639No ratings yet
- Dynamic Analysis of Flexible Turbo-Rotor System Using Super-ElementsDocument14 pagesDynamic Analysis of Flexible Turbo-Rotor System Using Super-ElementsHalil İbrahim KüplüNo ratings yet
- MDocument1 pageMgokul rNo ratings yet
- KOM: Unit 1: MECHANISMS: Ob Jective Questions From Gate With SolutionsDocument5 pagesKOM: Unit 1: MECHANISMS: Ob Jective Questions From Gate With SolutionsVenkateswar Reddy Mallepally100% (1)
- ch05 SolmanDocument234 pagesch05 Solmanragingcelery100% (1)
- Vector Loop Equations For Position AnalysisDocument13 pagesVector Loop Equations For Position AnalysisMajedNo ratings yet
- Assignment 1, ENG8603Document6 pagesAssignment 1, ENG8603spppppNo ratings yet
- Four-Bar Linkage Analysis: The 4R QuadrilateralDocument12 pagesFour-Bar Linkage Analysis: The 4R QuadrilateralKhuong VuNo ratings yet
- Vibration ProjectDocument11 pagesVibration ProjectEileen WongNo ratings yet
- MECH-314 Midterm Exam 2 Dynamics of MechanismsDocument4 pagesMECH-314 Midterm Exam 2 Dynamics of MechanismsMayisha FablihaNo ratings yet
- Synthesis of Planar Mechanisms, Part Iii: Four-Bar Mechanisms For Three Coupler-Positions GenerationDocument9 pagesSynthesis of Planar Mechanisms, Part Iii: Four-Bar Mechanisms For Three Coupler-Positions GenerationKevin Paredes GutierrezNo ratings yet
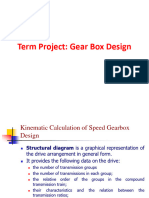
- Term Project - Gear Box DesignDocument47 pagesTerm Project - Gear Box DesignMovie 6890No ratings yet
- ProblemswithSolutions Chapter2Document26 pagesProblemswithSolutions Chapter2samanmech100% (1)
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityFrom EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNo ratings yet
- VSDC Spring 2016 Homework 01Document12 pagesVSDC Spring 2016 Homework 01hilgadNo ratings yet
- Reservoir Engineering in Modern Oilfields: Vertical, Deviated, Horizontal and Multilateral Well SystemsFrom EverandReservoir Engineering in Modern Oilfields: Vertical, Deviated, Horizontal and Multilateral Well SystemsNo ratings yet
- EssayDocument1 pageEssayAndy NgoNo ratings yet
- Lab 1Document9 pagesLab 1Andy NgoNo ratings yet
- Tutorial 2 Q1: Problem 5-8 Design A Linkage To Carry The Body in Figure P5-1 Through TheDocument3 pagesTutorial 2 Q1: Problem 5-8 Design A Linkage To Carry The Body in Figure P5-1 Through TheAndy NgoNo ratings yet
- Lab 3 - Resonance and Speed of SoundDocument1 pageLab 3 - Resonance and Speed of SoundAndy NgoNo ratings yet
- Lab 3 VibrationDocument10 pagesLab 3 VibrationAndy NgoNo ratings yet
- Lab E4 Group 22 PDFDocument12 pagesLab E4 Group 22 PDFAndy NgoNo ratings yet
- Entropy Part 2Document41 pagesEntropy Part 2Andy NgoNo ratings yet
- HES5310 Machine Dynamics 2 Lecture NotesDocument39 pagesHES5310 Machine Dynamics 2 Lecture NotesAndy NgoNo ratings yet
- Book 1Document2 pagesBook 1Andy NgoNo ratings yet
- EEE20001 Lab E1 Group 22Document7 pagesEEE20001 Lab E1 Group 22Andy NgoNo ratings yet
- Lab E2 Group 22Document7 pagesLab E2 Group 22Andy NgoNo ratings yet
- Mee40001 Thermodynamics 2 / Semester 2 2017 Assignment 1 DUE DATE: 25.09.2017 Mark: 5 % of Final Mark Answer All QuestionsDocument1 pageMee40001 Thermodynamics 2 / Semester 2 2017 Assignment 1 DUE DATE: 25.09.2017 Mark: 5 % of Final Mark Answer All QuestionsAndy NgoNo ratings yet
- Lab E2 Group 22Document7 pagesLab E2 Group 22Andy NgoNo ratings yet
- DEF 121 Engineering Mathematics 2 Differentiation Notes NewdocxDocument24 pagesDEF 121 Engineering Mathematics 2 Differentiation Notes NewdocxAndy NgoNo ratings yet
- Swinburne University Engineering Math FormulasDocument6 pagesSwinburne University Engineering Math FormulasAndy Ngo100% (1)
- Assignment 1Document5 pagesAssignment 1Andy NgoNo ratings yet
- File IO PracticeDocument1 pageFile IO PracticeAndy NgoNo ratings yet
- Assignment 1Document5 pagesAssignment 1Andy NgoNo ratings yet
- Assignment Cover Sheet For Undergraduate ProgramsDocument1 pageAssignment Cover Sheet For Undergraduate ProgramsAndy NgoNo ratings yet
- Mitsubish TransmDocument44 pagesMitsubish TransmLuiz FernandoNo ratings yet
- OBD 2 To OBD1 Conversion Harness Refer ThisDocument4 pagesOBD 2 To OBD1 Conversion Harness Refer ThisAndy NgoNo ratings yet
- Fluid Mechanics Assignment on Flow Rate, Pipe Flow, Hydropower & Fuel PumpsDocument2 pagesFluid Mechanics Assignment on Flow Rate, Pipe Flow, Hydropower & Fuel PumpsPeter AdamNo ratings yet
- Additional Slides For Rotational MotionDocument9 pagesAdditional Slides For Rotational MotionAndy NgoNo ratings yet
- 2013 s1 DEF111 Group Assignment Cover Sheet For Diploma ProgramsDocument1 page2013 s1 DEF111 Group Assignment Cover Sheet For Diploma ProgramsAndy NgoNo ratings yet
- Forces and FluidsDocument1 pageForces and FluidsAndy NgoNo ratings yet
- Intel, Amd ComparisonDocument10 pagesIntel, Amd ComparisonAndy NgoNo ratings yet
- Physics Lab 1 ReportDocument3 pagesPhysics Lab 1 ReportAndy NgoNo ratings yet
- GA16 Nissan Sentra Timing MarkDocument5 pagesGA16 Nissan Sentra Timing MarkAndy Ngo50% (2)
- Forces and FluidsDocument2 pagesForces and FluidsAndy NgoNo ratings yet