Professional Documents
Culture Documents
Arcode: Hizli Kurulum Kilavuzu
Uploaded by
MDR 8434Original Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Arcode: Hizli Kurulum Kilavuzu
Uploaded by
MDR 8434Copyright:
Available Formats
ARCODE
DİŞLİLİ/DİŞLİSİZ MAKİNELİ ASANSÖRLER İÇİN TÜMLEŞİK
KUMANDA SİSTEMİ
INTEGRATED ELEVATOR CONTROLLER FOR TRACTION LIFTS
HIZLI KURULUM KILAVUZU
QUICK INSTALLATION GUIDE
TR/EN
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
CONTENTS
STEP-1: MECHANICAL INSTALLATION .................................................................................................................. 39
STEP-2: MOTOR CONNECTIONS................................................................................................................................ 40
STEP-3: PREPARATIONS FOR AUTO-TUNE ............................................................................................................ 42
STEP-4: AUTO-TUNE ...................................................................................................................................................... 46
ENGLISH
STEPS-5: PREPARATIONS FOR NORMAL OPERATION....................................................................................... 47
STEP-6: SHAFT LEARNING & TEST DRIVING ........................................................................................................ 49
STEP-7: LANDING AND CAR CALLS SETTINGS..................................................................................................... 51
STEP-8: OTHER SETTINGS .......................................................................................................................................... 53
APPENDIX-1 ..................................................................................................................................................................... 55
APPENDIX-2 ..................................................................................................................................................................... 60
APPENDIX-3 ..................................................................................................................................................................... 61
TÜRKÇE
ERROR CODES - POSSIBLE REASONS AND SOLUTIONS .................................................................................... 62
ARKEL 38 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
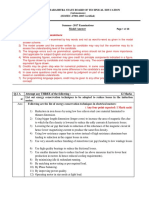
Step-1: Mechanical installation
Mount ARCODE control cabinet, brake resistor, battery pack and UPS (if required) to their places.
16cm
12cm
34cm
Figure-1: Dimensions of battery pack (it is required only when
the inverter is supplied with battery during emergency evacuation)
(it is not used for brake relase emergency evacuation)
ENGLISH
TÜRKÇE
Figure-2b: ARCODE
Figure-2a: ARCODE control panel(Control panel
dimensions and type can change depending on
installation type.
11,5cm 15,5cm
18cm 22,5cm
Type-A Type-B
Warning: Mount the brake resistor
horizontally! Don’t mount it on
32,5cm 30,5cm control panel.
Mounting holes Mounting holes
Figure-3: Type-A and Type-B dimensions of brake resistors
ARKEL 39 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Step-2: Motor connections
Make the connections of motor phases & motor PTC, brakes & brake release contacts, motor fan, encoder,
brake resistor and battery pack with UPS (if required).
1
2 ARCODE Control Panel
Brake Resistor
3
4
Motor 5
Batteries &UPS
6
1 : Motor phases & motor PTC connections 4 : Encoder Connections
electrical drawing which is suitable
***Motor does not has PTC
you must bridge T1 and T2
ENGLISH
! you can find connections in
Motor
Control Panel
phases
for your encoder
Motor
PTC
2 : Brake & Brake checkback microswitches
connections 5 : Brake resistor connections
TÜRKÇE
Brake Resistor
***Brake Resistor does
not has PTC you must
Control Panel
2. brake
bridge T3 and T4
Control Panel
6 : Batteries connections (If required)
2. brake
Batteries box
Control Panel
3 : Motor fan connections
Control Panel
Figure-4: Motor, brake, fan, encoder, brake resistor and batteries connections
ARKEL 40 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Figure-5: UPS connections
ENGLISH
***If there is SERVOSAN brand UPS inside the control panel these connections are not used.
***If you do not have UPS you must bridge connectors U-LI with U-LO and U-NI with U-NO using with suitable cables.
Otherwise you can not run control panel.
TÜRKÇE
ARKEL 41 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Step-3: Preparations for Auto-tune
Auto-tune process must be performed by ARCODE before initial set-up of an elevator. In this way ARCODE
learns characteristic of motor. During the Auto-tune the elevator must be operated manually, therefore the
recall command has to be provided. For recall operation make the following connections
Connect the mains power of the control panel (L1, L2, L3, N, PE)
Bridge the safety circuit by the terminals in control panel shown below.
Control Panel Terminals
Figure-6: bridging of safety chain
ENGLISH
Bridge the signals of top and bottom limit switches (817 and 818) to terminal 100 on KBK-10&11 connection
board shown below.
KBK-10&11
Figure-7a: bridging of top and bottom limit switches
Bridge the car top inspection signal (869) to terminal 100 on KBK-10&11 connection board shown below.
TÜRKÇE
KBK-10&11 Figure-7b: bridging of car top inspection signal
Figure-8a: KBK10&11 connection board
KBK10&11 connection board is used for all required connections for shaft. That board includes supply and
inputs of all safety chain, car CANBus input/output, and car connections. If you prefer pre-wired connections, all
connector connections are sign with labels on flex cables.
ARKEL 42 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
ENGLISH
Figure-8b: AREM handset
AREM hand terminal can be connected to CANBus line which is located in
shaft, LOP, COP or control panel. It is not possible to make any change in the
parameters without AREM.
AREM will run automatically when it is connected CANBus line. It can be
connected to KXCBA board or any CANBus access point. For first installation
ARCODE software must be updated by AREM. (See Appendix-1 software
update).
TÜRKÇE
Figure-8c: KXCBA CANBus terminal
Activate the manual operation mode by turning the recall switch on the recall hand terminal to “REV”
position. In this case the motor can be moved by recall buttons from the control panel.
Recall activation switch
Figure-8d: Recall hand terminal
Turn on SMP main braker after opened all circuit
breakers (fuses).
Figure 9a appears on AREM screen when it is
connected to CANBus line.
ARKEL 43 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
To enter menu, press “Tools” button on AREM
When pressed first time to “Tools” button you
will see figure 9b. AREM has 3 different user
access level. As “Installer”, “Maintainer” and
“Guest” which has system access level. And
“Installer” has uppermost access level in system.
For first installation it’s access code is“000000”
for all access level. To enter menu press “Enter”
button.
Figure-9b: Access levels
ENGLISH
When entered menu to select “Device
Parameters” use direction arrows and press
Enter button to enter “Device Parameters”.
TÜRKÇE
Figure-9c: “Device Parameters” settings
Check parameters, “Number of floors”, “Mains
voltage” respectively.
“Operation mode” parameters should be selected
“Installation mode”. (According to EN81-20
norms, if the defined critical inputs are connected
to a peripheral and if this peripheral and main
controller can not be communicated, the system
has to be stopped (Er98). When this parameter is
selected as “Installation Mode”, system will not
check the critical signal positions and will not give
error.)
Machine plate information” should be set
according to motor plate.
Figure-10a: “Operating settings”
ARKEL 44 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
“Maximum travel speed”, “inspection mode-
speed”and “recall speed” which is located in
“Travel curve settings” should be set
according to motor speed.
The nominal speed which is written on motor
plate has to be used for parameter “Maximum
travel speed”.
Figure-10b: “Travel Curve Settings”
ENGLISH
Parameter “Encoder type” which is located
under “Motor encoder Settings” should be
selected according to motor encoder type.
TÜRKÇE
Figure-10c: “Motor encoder settings”
If motor doesn’t have brake(s) microswithces
or it has but not connected, “Mechanical brake
monitoring” and “Mechanical brake-2
monitoring” should be selected “Off” which is
located “Protection and monitoring settings”
under parameter ”Other Protection Settings”.
Figure-10d: “Mechanical brake monitoring”
ARKEL 45 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Step-4: Auto-tune
Press ESC button to back main menu after completion of steps explained upper. When pressed ESC button you
will see a warning “Changes will be saved Confirm?”. Select “Yes” to back main menu.
ARCODE can do auto-tune both with ropes and
wihtout ropes. To run it, the cursor should be
aligned icon of “Auto-tune” and press Enter
button.
ENGLISH
Figure-11a: Auto-tune screen
TÜRKÇE
Figure-11b: Auto-tune starting screen for gearless Figure-11c: Auto-tune starting screen for geared
When pressed Enter button, if gearless machine is used, Figure-11b appears on the screen, if geared machine is
used, there will be only 1 option for motor tuning which is like the Picture on Figure-11c. When pressed Enter
button again, you will see “Turn the recall switch to INSPECTION possition ”
Turn the recall switch Which is located in control panel to inspection possiton. Press up or down button until see
“Auto-tune was completed” If you release button before auto-tune is completed you must run again.
Pay attention: ARCODE does not start auto-tune if you turn hand terminal which is located on car roof to
inspection position. The hand terminal which is located in control panel should be turned to inspection.
After auto-tune is completed press up or down button to drive motor.
When you press up or down button if the motor turns opposite direction, you must change “motor direction” by
parameter “driver settings”.
To fix motor direction if “motor direction” had been selected “ clockwise” you must select “ counter-clock
wise”. If “motor direction” had been selected “ counter-clockwise” you must select “ clock wise” .
If the motor turns correctly in inspection mode you can pass other steps below.
Remove the bridging made for safety circuit terminals 110-140 (see Figure-6).
Remove the bridging made for correction switches 817 and 818. (See Figure-7a).
ARKEL 46 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Steps-5: Preparations for Normal Operation
Make all the other mechanical installations of elevator system and make the inspection box wiring, pit box
wiring and safety circuit wirings.
Make the installation of round magnets for SKSR1 bottom limit switch (bottom correction sensor). The cables of
SKSR1 magnetic switch must be connected 100 and 817 terminals in IBC board. Round magnets of bottom limit
switch must be put as shown Figure-12. The needed distance for magnets is shown on AREM screen When
parameter “Shaft Learning” is selected.
Black side Move the car to the bottom floor. Car must be exactly at
the floor level
The deceleration distance is Install the round magnet with red color side above the
Shown on AREM screen
SKSR1 magnetic switch as deceleration distance. It
means it must be switched on when down deceleration
signal for bottom floor is activated.
ENGLISH
Install the round magnet with black color side a little
Red side
above the red color magnet. It means it must be switched
off when the car is out of the bottom limit zone. The
BOTTOM FLOOR LEVEL distance between magnetic switch and magnets must be 1-
Figure-12: Installation of magnets for SKSR1 bottom 2 cm.
correction sensor
Make the installation of round magnets for SKSR2 top limit switch (top correction sensor). The cables of SKSR2
TÜRKÇE
magnetic switch must be connected 100 and 818 terminals in IBC board. Round magnets of top limit switch
must be put as shown Figure-13.
The deceleration distance Move the car to the top floor. Car must be exactly at the
is Shown on AREM screen floor level.
Install the round magnet with red color side below the
SKSR2 magnetic switch as deceleration distance. It
means it must be switched on when up deceleration signal
for top floor is activated.
Install the round magnet with black color side a little
below the red color magnet. It means it must be switched
TOP FLOOR LEVEL
off when the car is out of the top limit zone. The distance
between magnetic switch and magnets must be 1-2 cm.
Figure-13: Installation of magnets for SKSR2
top
ARKEL 47 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Make the installation of bar magnets for SML1&SML2 door zone switches. The cables of magnetic switches must be
connected ML1-ML0-1000 and ML2-ML0-1000 terminals on IBC board respectively.
Move the car to the end of floors.
Car threshold must be exactly at the floor level.
15cm Install the bar magnet opposite to the zone magnetic switches. The middle of
the ribbon magnet must be on a level with the middle of the magnetic
15cm switches.
The distance between magnetic switches and magnet must be 1-2 cm.
30 cm bar magnets must be fixed with screw or glue.
CAR
Repeat this installing operation at all floors.
FLOOR LEVEL
Figure-14: Installation of magnets for SML1-SML2 door zone sensors
ENGLISH
If motor has brake mikroswitch(es) connect it to BRM and BRM2 inputs.(see figure 4-2). And select “on”
“Mechanical brake monitoring” and “Mechanical brake-2 monitoring”.
Also “Operation mode” must be selected “Normal Operation” which is located under “Basic settings”.
TÜRKÇE
ARKEL 48 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Step-6: Shaft learning & test driving
ARCODE integrated elevator system needs to do a special shaft-learning run before going in to normal operation.
This must be done only once. Before performing a shaft-learning run, please check your magnets and magnetic
switches that are needed for encoder positioning system and then follow the steps described below:
Select icon of “Shaft learning” in the menu and press
Enter button. You can run shaft learning procedure
pressing by “F2” button.
To run shaft learning procedure lift must not be in
inspection or recall mode and safety circuit must be
closed. If elevator is waiting in inspection mode when
shaft learing is started, a warning message appears on the
ENGLISH
screen.
Position of car isn’t important during shaft learning. It
will move downward with half of high speed. It starts to
learn all floors after it reaches to bottom floor and shaft
learning is completed after it reaches to top floor.
Figure-15a: Shaft learning screen
If you need to interrupt the shaft-learning drive for any
reason, press the “Emergency Stop” button or take the
lift into manual operation mode by turning the recall
switch.
TÜRKÇE
The shaft learning procedure depending on the length
of the shaft, this may take a while. You can follow
stage of shaft learning on AREM screen.
When the shaft learning run is completed, a message
“Shaft learned” will be displayed. Back to main menu
and save which is learned distance.
Figure-15b: Shaft learning stages
ARKEL 49 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Elevator will move bottom floor after completed
shaft learning to reset floor numbers. The car will
appear on screen as shown figure-16 when car
reaches to the bottom floor. The car goes bottom
floor to reset floor number every time when
ARCODE energized first time.
The elevator must be checked by given call whether
it reaches to destination floors or not. To give a call
by AREM there are two methods. Press up or down
button after pressing “F2” button. If you press one
time to direction button the car moves 1 floor up or
down. Given call is determined with the number of
pressed direction buttons.
Figure-16: Floor resetting
ENGLISH
Second method is press “info” button when AREM
shows main screen (Figure-16).
Select icon of “COP and LOP calls” and press Enter
button.
Use direction arrows to give a call. Press Enter
button. The car will move to given floor.
TÜRKÇE
Figure-17: give a call by “COP and LOP calls”
ARKEL 50 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Step-7: Landing and car calls settings
Car Calls:
CPC or CPC-T (Car Panel Controller) boards are used to give car calls. These are connected to IBC (Inspection Box
Controller) board by serial communication. if dipswitch settings were done which is shown Appendix-1, it is not
necessary to do any additional settings. (Note that CPC and CPC-T dipswitch settings are different from each other.)
Landing Calls:
ARCODE can accept landing calls both serial connection(CANBus) and parallel connection. If landing calls are
wanted to use as paralel, the SP-16 board has to be used.(see Appendix-1 for more information)
If CANBus is wanted to use for landing calls, position of landing calls’ buttons would be defined.
ENGLISH
Firstly AREM hand terminal should be connected to
CANBus connector on the CPC board to define place
of landing buttons.
Give a call to bottom floor from COP.
Press “Tools” button and select icon of “LOP
Learning” and press Enter button.
TÜRKÇE
Figure-18a: LOP learning
“LOP learning” must be selected to start to learn
landing button position.
“LOP position reset” is used to reset which was
learnt LOP positions.
When selected “LOP learning” the figure-18c appears
on the screen of AREM. If there aren’t any learned
position you will see figure right side of floor
numbers. In that situation if your LOP has a display
you will see “??” on LOP screen. If position learning
was done previously you will see figure right
side of floor numbers. In that situation you will see
“A” “+” and defined floor number on LOP screen
respectively.
Figure-18b: selection of LOP learning
ARKEL 51 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
“A” shows defined floor. For B door this sign will
be “B” . “+” means the display is used for landing
call button. If “-” sign appears on screen of LOP,
this means the display is used only display.
Figure-18c: LOP position learning screen
LOP learning:
ENGLISH
If the car is at bottom floor and LOP display shows “??” or wrong landing floor, you must hold down call button
of LOP until appears correct floor number on LOP screen. For first floor door A you must see “A” “+” and ”1”
respectively. If your system has B door you should slide scroll box to right side and hold down call button of
LOP until appears “B” “+” and “1” respectively. The while figure will change as figure . Give a call
from COP to second floor after completed definition of first floor. All LOPs must be defined for all floor
according to explanation above.
If LOP doesn’t have a screen, you should hold down call button of LOP until figure will change as figure
TÜRKÇE
on AREM screen. The while led of LOP will flash for a second when landing position is learned.
If the LOPs are used only for display you don’t have to do these settings. The display will show floor number
when elevator starts to normal working.
ARKEL 52 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Step-8: Other Settings
Picture Memory Settings of LCD
The software must be updated like explained Appendix-1 when first time a LCD is connected CANBus line. The software
update should be done after all LCDs are connected CANBus line. The Picture memory is empty when first time an LCD
is connected CANBus line.
The AREM must be connected which is located
same LCD CANBus line. If you want to update
LCD of COP the AREM must be connected to
COP. If LCDs of landings are wanted to update
this time the AREM must be connected shaft
CANBus line. Other wise ARCODE can not find
correct LCDs.
ENGLISH
To update Picture memory of LCD, select “LCD
update screen” and press Enter button.
Figure-19a: LCD Update Screen
TÜRKÇE
Updated LCD type is selected and pressed Enter
button.
To select message right/left arrows are used. To
select Picture for message up/down arrows are
used.
All changes are saved in memory of LCD.
Figure-19b: LCD type selection
ARKEL 53 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Deceleration Distance
Arcode does not need any additional settings to determine deceleration distance because of its direct approach feature.
To make comfort settings, “Travel curve
settings” must be selected which is located under
“Driver Settings”. Choose “comfort setting”
parameter and press Enter button.
Default settings of “comfort settings” as
comfort:3/Performance:3 is set. For that
situation both comfort and performance is set as
nominal.
If you want the elevator stops quickly you
should decrease comfort value. The performance
will increase when comfort is decreased.
If you want more comfort you should increase
ENGLISH
comfort parameter. This time, performance will
decrease.
Figure-20: Comfort level
TÜRKÇE
ARKEL 54 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Appendix-1
SOFTWARE UPDATE
When AREM is first connected to the CANBus line, if AREM’s SD card doesn’t have the software found in ARCODE,
AREM will inform that an update is needed. Start the update pressing the button F1. The system will be restarted when
the update is complete. All ARCODE peripherals are updatable. For this reason, with each peripheral added to the
elevator, the software needs to be updated.
Choose “firmware update” icon and press
“Enter”.
ENGLISH
Figure-1a: firmware update
TÜRKÇE
The latest update is the one having the nearest
date. Start software update by pressing
“Enter”.
While carrying out setup, if there are
peripherals not connected to the CANBus
line, you will have to update the software
again. Otherwise, peripherals you connected
later won’t work.
***Peripherals: They are all units that run on CANBus line. Each unit has a unique address. During update, other
peripherals are searched and updated after ARCODE is updated.
CAR PANEL COTROLLER (CPC): It is the board for car call. It is used to make a call for the car.(socket type)
CAR PANEL CONTROLLER (CPC-T): The car call buttons are connected to this board wire by wire.(terminal type).
More than 16 stops, this is not possible to use CPC-T board.
INSPECTION BOX CONTROLLER (IBC): It is revision box’s card. The communication between control panel and
car is made by this board.
ENCODER ABSOLUTE (ENCA): It is the card for encoder link for gearless machines.
ENCODER INCREMENTAL (ENCI): It is the card for encoder link for geared machines.
IO-0210: This board gives extra 2 prog.inputs and 10 prog.transistor outputs to the user.
ARKEL 55 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
SP-16: In the parallel installation Systems, LOP calls are connected to this board.
BC-BUT: It is the landing call button without indicator. Appendix-1
BCD-2X: landing call button with two parts and a dotmatrix indicator.
BCD-3X: landing call button with three parts and a dotmatrix indicator.
BCD-LCDA: 128x64 resolution LCD. The idicator can be used both inside the car and landing or door indicator.
CAR PANEL CONTROLLER BOARDS
In Arcode, 2 different boards can be used optionally for car calls. If car call buttons will be connected with socket type,
CPC board should be used. If car call buttons will be connected wire by wire with terminal, CPC-T board should be used.
In the systems of more than 16 stops, using CPC-T board is not possible.
1-DIP SWITCH SETTINGS OF CPC BOARD
ARCODE, that can work with two-door support up to a total of 64 stops, collects car calls with the help of a CPC card.
Each CPC card can serve up to 24 stops. If there are more than 24 floors or on condition that it has two doors, two CPC
ENGLISH
cards must be used. For an elevator with 64 stops and two doors, a sum of 6 CPC cards must be used. The dipswitch
which is located on CPC board is used to determine working type and door settings.
Dipswitch-1 Dipswitch-1 Dipswitch-3 Dipswitch-4
0 0 1 0 CPC-1A Up to 24 floors
0 1 1 0 CPC-2A Up to 48 floors
TÜRKÇE
1 0 1 0 CPC-3A Up to 64 floors
Up to 24 floors
0 0 0 1 CPC-1B
for 2nd door
Up to 48 floors
0 1 0 1 CPC-2B
for 2nd door
Up to 64 floors
1 0 0 1 CPC-3B
for 2nd door
0 0 1 1 CPC-1AB Up to 24 floors
0 1 1 1 CPC-2AB Up to 48 floors
1 0 1 1 CPC-3AB Up to 64 floors
Figure-2: dipswitch settings of CPC board
For example: If you have a one-door system up to 24 floors, dip switch settings must be done “0010”. “ON” on the dip
switch means 1.
ARKEL 56 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Appendix-1
2-DIP SWITCH SETTINGS OF CPC-T BOARD
CPC-T board can work up to 16 stops.
Dipswitch-1 Dipswitch-2 Dipswitch-3 Dipswitch-4
ON Door-A enable Door-B enable Gray outputs Outputs are inverted
OFF Door-A disable Door-B disable Binary outputs Outputs are normal
CPC-T board can be optionally used instead of CPC board. As seen in the table above, the dip-switch settings are
different from each other. So, please pay attention this case while doing dip-switch settings.
For CPC-T board, car call button connections are done wire by wire with terminal. If the system has more than 16
stops, it is not possible to use CPC-T board.
ENGLISH
IO-0210 BOARD
In some cases, programmable inputs and outputs may not be enough. Then, this IO-0210 board would be useful. This
board gives 2 inputs and 10 transistor outputs to the user.
There are 8 dip-switches. The logic of these dip-switches is as follows:
For outputs, 1 and 2 dipswitches are used to select the group number of output:
1 2 Prog.output
TÜRKÇE
OFF OFF 1st group
OFF ON 2nd group
ON OFF 3rd group
ON ON 4th group
From “Programmable outputs” parameter, the outputs should be assigned from related group number. (Tools device
parameters programmable outputs IO-0210 board outputs)
1 pc. IO-0210 board gives 10 programmable transistor outputs to the user.
For inputs, other 6 dipswitches (from 3(MSB) to 8(LSB)) works with a binary logic. For example;
MSB: Most Significant Bit (3rd dip-switch)
LSB: Least Significant Bit (8th dip-switch)
You can program 64 different IO-0210 boards for inputs.
000000 “IO-0210-1 board PI1 and IO-0210-1 board PI2”
000001 “IO-0210-2 board PI1 and IO-0210-2 board PI2”
000010 “IO-0210-3 board PI1 and IO-0210-3 board PI2”
000011 “IO-0210-4 board PI1 and IO-0210-4 board PI2”
000100 “IO-0210-5 board PI1 and IO-0210-5 board PI2” and so on...
This can be chosen from 0 up to 63. (64 pcs.)
ARKEL 57 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Appendix-1
3 4 5 6 7 8 IO-0210-x
OFF OFF OFF OFF OFF OFF 1
OFF OFF OFF OFF OFF ON 2
OFF OFF OFF OFF ON OFF 3
OFF OFF OFF OFF ON ON 4
OFF OFF OFF ON OFF OFF 5
ENGLISH
Programmable inputs should be assigned from the related parameter depending on the dip-switch settings.
(Tools device parameters programmable inputs IO-0210 board inputs)
TÜRKÇE
ARKEL 58 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Appendix-1
SP-16 SETTINGS
SP-16 card is used when buttons are not serial communication (CANBus). It can serve up to 16 floors at most. In one way
collective external calls can be collected up to 16 floors with a SP-16. In case of two way collective, calls can be collected
up to 9 floors with a SP-16. For double buttons 16 floors two SP-16 must be used. Dip switch settings must be done
according to the following table.
CALL TYPE / DOOR / DS2
DS1 DS3 I1 I2 I3….…..I7 I8 I9 I10….........I14 I15 I16
DIRECTION CHOICE
One-Way Collective (2-16 Stop)/
Door A / 301 202 203…………………………...214 215 216
ENGLISH
Down 0 0 0
One-Way Collective (2-16 Stop)/
Door B / 301 202 203…………………………...214 215 216
Down 0 0 1
Two-Way Collective (2-9 Stop) /
Door A / 301 302 303…..307 308 202 203…….207 208 209
Up & Down 0 1 0
TÜRKÇE
Two-Way Collective (2-9 Stop) /
Door B / 301 302 303…..307 308 202 203…….207 208 209
Up & Down 0 1 1
Two-Way Collective (10-16Stop)
Door A / 301 302 303……………………………314 315 -
Up 1 0 0
Two-Way Collective (10-16Stop)
Door B / 1 0 1 301 302 303……………………………314 315 -
Up
Two-Way Collective (10-16Stop)
Door A / - 202 203……………………………214 215 216
Down 1 1 0
Two-Way Collective (10-16Stop)
Door B / - 202 203……………………………214 215 216
Down 1 1 1
Figure-3: SP-16 dipswitch settings
ARKEL 59 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Switch number 4 is used for indicator outputs. If switch number 4 is 1, it gives inverted gray output. If it is 0, it gives
output as gray. The switch number 5 is free for future features. The dip switch number 6 must be “0”. If it is “1”, it will
work in test mode. “ON” on the bottom switch means “1”.
Appendix-2
MEANING OF 7-SEGMENT MESSAGES ON ARCODE
INIT: Elevator goes bottom floor for reset(Initialising)
UpEn: Enca board is being updated (Updating Enca)
ENGLISH
O-in: Only inspection
notu: Needed autotuning(No Tuning)
noSh: Needed Shaft learning (No Shaft Learning)
120-: No 120 signal
Fire: Fire mode
TÜRKÇE
RcLL: Recall mode
inSP: Inspection mode
tune: Autotune is being done
SHFL: Shaft learning is being done
ErXX: There is an error that XX code. (If it is flashing this means elevator is blocked)
rtrX: Elevator go out an error and it will retry X seconds later (x:1-5)
L. X: Elevator is waiting at X. floor door zone
L X: Elevator is waiting at X.floor but the car isn’t at door zone.
1.58: Elevator is going with speed of 1.58 m/s
-0.35: Elevator is going downward with speed of 0.35m/s
door: There is a call but the door is open
EUAC: Rescue mode
ARKEL 60 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
Appendix-2
EPro: in the process of reading from Eprom or writing to Eprom now
0.00: SEV key is activated. The elevator is stopping, speed value is 0.00 m/s
LuL : SEV key is activated. The elevator is moving with brake releasing. The car is at the door-zone and speed
ENGLISH
is lower than 0.3 m/s.
StoP: SEV key is activated. The elevator is moving with brake releasing. The speed is greater than 0.3 m/s.
UpEx(x=9..0) Enca software is being updated. "x" number shows the remaining time of update. It counts from 9 to 0.
When it reaches 0, update process is ended.
u36: the car runs away from the floor which detects fire in U36 function mode.
Parc: It is going to park floor.
TÜRKÇE
noSr: The elevator is in “Out of Service” mode with “OOS” input.
Appendix-3
In order to clear the permanent error, the following 2 steps should be performed.
On AREM,
1) Tools System Tools Clear Permanent Error
2) Tools System Tools Reset System
ARKEL 61 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
ERROR CODES - POSSIBLE REASONS AND SOLUTIONS
01- Couldn’t read parameters. Checksum wrong: If Eeprom is empty or checksum is faulty, it gives this
error. Try to restart system. If it doesn’t solve, get contact to Arkel support.
02-Couldn’t write parameters. Verify error: If it couldn’t write the parameters or statistics to Eeprom, it
gives this error. Try to restart system. If it doesn’t solve, get contact to Arkel support.
ENGLISH
03-Parameters were written with a newer version. Some parameters will be lost: If the system is
updated to an older version, and if the functions in new version don’t exist in the updated version, the values in the first
version (before update) is cleared.
04- No connection with ENCA board: If ARCODE can not communicate with ENCA board more than 1
second, it gives this error.
- When this error is received, encoder links must be controlled. Encoder link can be wrong or there may be a problem
with encoder feed.
- The flat cable between Arcode and ENCA should be checked.
TÜRKÇE
- Encoder type and motor type parameters should be checked.
05-DIP-switch configuration wrong or could not be read: When dipswitches are adjusted in a wrong way,
it gives this error.
- You can get contact to Arkel support.
06- One of encoder channels disconnected: This error occurs when there is no info from ENCA board for 1
second.
- The flat cable between Arcode and ENCA, and encoder connections should be checked.
07- Current was over driver limit: If the motor current exceeds over 200% of max.current of IPM module, it
gives this error.
- Arcode capacity should be suitable with motor.
- The car shoes may be too tight or the motor brake may not open fully.
- For geared machine ‘nominal slip frequency’ parameter might be entered wrong.
- ‘Noload current’ parameter should be checked.
08-Current was near driver limit continuously: If the motor current exceeds over 250% of max.current of
IPM modüle for 6 seconds, it gives this error.
- Be sure that load balance is completed correctly.
- Check the machine brake is being opened completely.
- Check the ‘nominal slip frequency’ and ‘noload current’ parameters in asynchronous machines.
ARKEL 62 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
09- Motor or control cabinet overheated: If T1 and T2 inputs are not short circuit, this error occurs.
- Check the PTCs of motor, control panel and brake resistor.
- Check T1 and T2 terminals on ARCODE. T1 and T2 should be short circuit for normal operation. When the
temperature increases, the short circuit is cut, and turns to open circuit.
10- Dropping of main contactors could not be sensed: When main contactors and brake are inactive, and if
main contactor monitoring (KRC) signal is OFF for 3 seconds, this error occurs.
- When door bridging card is available and though this is selected from within the menu and the brigde between 140-
140P is not excluded, this error is met.
- KRC terminal on Arcode should be active when contactors are dropped.
Note: If this error is shown on AREM screen as ‘PERMANENT’, it means that turned to permanent error. In order to get
rid of the permanent error case, look at Appendix-3.
11- Picking of main contactors could not be sensed: When main contactors and brake are active, and if main
ENGLISH
contactor monitoring (KRC) signal is still ON for 3 seconds, this error occurs.
- This error occurs in case of not becoming 140P (it seems as 14P on AREM) even though safety circuit is 120-130-
140.
- If this error is received, there may be a breakdown in door bridging card.
- Besides, door locks time is set 0=0 and if the safety circuit doesn’t work, this error is received again. To prevent this,
door locks time must be entered at least =0,3 seconds.
- If there is no door bridging card, 140-140P inputs must be bridged on ARCODE.
Note: If this error is shown on AREM screen as ‘PERMANENT’, it means that turned to permanent error. In order to get
rid of the permanent error case, look at Appendix-3.
TÜRKÇE
12- Holding of mechanical brake not sensed: When the motor mechanical brake is off, 100 signal must be
transmitted to BRC input from brake micro switches. If this signal doesn’t exist, this error is received.
- Control brake switches. The signal 100 may not be transmitted to switches’ contacts.
Note: If this error is shown on AREM screen as ‘PERMANENT’, it means that turned to permanent error. In order to get
rid of the permanent error case, look at Appendix-3.
13- Release of mechanical brake not sensed: When the motor mechanical brake is on, signal 100 must be
cut. If signal 100 is still taken, this error occurs.
- Control brake switches. The motor brake may not be ON.
Note: If this error is shown on AREM screen as ‘PERMANENT’, it means that turned to permanent error. In order to get
rid of the permanent error case, look at Appendix-3.
14- DC-bus voltage is too high: gives this error when the line voltage is over of the limit voltage for 20
miliseconds.
- Check line voltage from L1,L2,L3 inputs. Line voltage mustn’t be over 420V.
- Besides, control brake resistance’s connections.
15- DC-bus voltage is too low: This error is received if system voltage is below working values for 3 seconds.
- Check line voltage from L1,L2,L3 inputs.
- Line voltage mustn’t be below 340V.
16-Power-module (IPM) reported error: When power-module enters alarm, it gives this error.
-During the movemenent in inspection mode, in order to stop the car, if up or down button is released suddenly, it
ARKEL 63 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
gives this error. The car should be stopped by pressing both buttons together. After contactors are dropped, the fingers
should be released.
- If this error is in normal mode, brake resistor connections should be checked.
- The safet circuit may be cutting during movement.
17-Inconsistent encoder speed reading: If the acceleration exceeds 10 m/s2 for 5 times consecutively, this error
occurs.
- Mounting of encoder should be checked. Encoder may be slipping while turning.
- Encoder cable connection and earth connection should be checked.
- Encoder cable should be at least 5 cm far from the cables which carries 220V AC voltage.
18- Car overspeeded: this error is faced with if the speed information from the encoder is above the calculated
speed.
- Encoder connections must be controlled. Motor parameters must be controlled.
- The elevator’s load balance must be set correctly. Load balance must be controlled by putting half-load into the car.
- Speed PID gains that are in PID control settings may be insufficient. Gains must be raised.
ENGLISH
- Safety circuit should be checked. While the car is moving, if safety circuit is cut suddenly, iy may give this error.
19- Could not reach required speed: If motor can not reach to the reference speed in 5 seconds, it gives this
error. Though sufficient power is transmitted to the motor and it doesn’t reach the desired speed, this error is met.
- Motor parameters must be controlled. Encoder connections must be controlled.
- Load balance must be controlled by putting half-load into the car.
- Speed PID gains that are in PID control settings may be insufficient. Gains must be raised.
- Motor unloaded current that is under motor plate information must be set %20 in geared machines.
- Try to move the car in asynchronous machines in inspection mode with open loop. If there is no problem in the open
TÜRKÇE
loop, check the connections of encoder and ENCI board.
20-Encoder connection fault: When wrong info. comes from encoder, this error is given. This error is received
only in synchronous machines.
- The connections between encoder and encoder board should be checked.
- Encoder type parameter should be checked.
21- At least one phase missing: L1,L2,L3 and N inputs must be controlled.
- One or more of the phases are not coming, or the voltage value may be low.
22- 3-Phase sequence is wrong: Phase L3 or L1 must be replaced with Phase L2.
23- 24V supply voltage too low: Measure ARCODE 24v inputs. This error is taken if the value measured is below
20 VDC.
- Control 24V power distribution unit (transformer) output. It must be 19 VAC in transformer output. If SMPS is used
instead of transformer the output voltage of SMPS must be 24VDC.
- If voltage is below 19 VAC, either the transformer is out of order or there is a line that used over current in 24VDC
outputs to decrease voltage.
24-Car was over top floor level: When the car passes ML2 of the top floor, it gives this error.
- The position of door zone magnets may be changed.
- Position of 818 magnet may be changed. “Shaft learning done” parameter should be adjusted “No”. Then, shaft
learning process should be performed again.
- If ML1/ML2 signal or signals are cut when elevator reaches top floor it can give the same error. The magnetic
switches must be checked.
ARKEL 64 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
25-Car was below bottom floor level: When the car passes ML1 of the bottom floor, it gives this error.
The position of door zone magnets may be changed.
- Position of 818 magnet may be changed. “Shaft learning done” parameter should be adjusted “No”. Then, shaft
learning process should be performed again.
- If ML1/ML2 signal or signals are cut when elevator reaches bottom floor it can give the same error. The magnetic
switches must be checked.
26-Total current measurement was non-zero: The total currents of U,V,W are not zero for 100 miliseconds,
this error occurs. If There is a problem about motor coils therefore the total current is changing (Normally total current
must be zero)
- Motor may be in 2 phase. Motor connections shold be checked.
- The contacts of contactors may not be conducting.
- If Current sensor(s) of ARCODE broke down, you can encounter same problem.
27- Maximum time of travel exceeded: After the car starts moving, ML1 and ML2 doorzone magnets are not
encounter until the entered “P0044-maximum allowed time of travel between floors” value, this error occurs. If the
ENGLISH
elevator can’t pass door area (ML1&ML2) magnets in the travel time set, this error is received.
- Maximum travel time (seyir süresi) must be adjusted according to engine speed.
- Door zone magnets should be checked.
- ML1 and ML2 magnetic switches should be checked. The distance between magnet and magnetic switch should be
almost 1 cm. The connections of magnetic switches should be checked.
28-No EN signal: While motor starts moving or during travel, if EN signal or 140P input becomes zero, it gives this
error.
- Be sure that 100 signal is coming to ARCODE EN terminal when contactors are activated.
- If there is DBR board, be sure that it is selected as “Door Safety Circuit Bridging Board: Installed” in the parameter.
TÜRKÇE
- If there is no DBR board, be sure that it is selected as “Door Safety Circuit Bridging Board: Not Installed” in the
parameter. There should be brige between 140 and 140P terminals.
29- ML1-ML2 short circuited: This error is faced with if M1, M2 signal stops or starts at the same time. Links of
ML1, ML2 magnetic switches are controlled.
- One of the signals may be OFF constantly.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
30- ML1-ML2 sequence wrong or could not be read: While the car is moving in the up direction if firstly
ML1 signal is active, this error is received. While the car is moving in the down direction, if firstly ML2 signal is active,
this error is received too.
- Magnetic switches must be put ML1 is down and ML2 is up. When the elevator goes down, first ML1 then ML2
must enter the magnet.
- Cables of magnetic must be controlled.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
31- Door(s) could not close: After door close command, 140 signal should be ON within door closing time, door is
opened again and waits for the time in “P0023: Time to wait after photocell interruption” parameter, then again tries to
close. The time of retries for closing door is determined in "P0033: number of unjamming tries" parameter. If safety
circuit still doesn’t come within door closing time, it gives this error.
- Door closing time may not be enough. Raise this time.
- Check the cables of door close relay in the revision box.
- There may be a problem with door contacts. Check the plug lock contacts.
- If door limit switches aren’t connected or they don’t exist, select “not connected” from door limit switches
parameter.
- For the semi automatic doors, “LIR” output shouldn’t be used for door close. K3 output should be assigned and used.
ARKEL 65 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
32- Door(s) could not open: this error is received when the command “open the door” comes and the safety
circuit (120-130-140) doesn’t cut in door’s opening time. Door opening time may not be enough. Raise this time. Check
the connections of door open relay in the revision box. If door limit switches aren’t connected or they don’t exist, select
“not connected” from door limit switches parameter.
34-130 off when 140 on. Check safety circuit: When UCM test is active or the doors are bridged, it doesn’t
give this error. Otherwise, When 140 is ON and 130 is OFF, it gives this error.
- Check the safety circuit connections. When the landing doors are closed,130 signal should be ON. When the car
door is closed, 140 signal should be ON.
35- Safety-chain(120) interrupted during travel: If the elevator is not in the recall or inspection mode, and if
120 is OFF, this error is received.
- Check circuit 120. During movement check parts that contacts can change place with movement such as loose chain
contacts and regulator contacts.
37- 140 interrupted during travel: If 140P doesn’t exist for 50 milliseconds during movement, it gives this
error. Door close signal may be cut during movement. Check the signal and door connections.
ENGLISH
38- Encoder position was too different from magnet reading: If the correction done by encoder is more
than 15 cm, this error is received.
- The door area magnet may be slided. Or the chains may be slided too much.
- Encoder coupling may lose. Be sure that encoder is mounted well.
39-Door-zone magnet could not be found: If the position of car is in the interval of ±3 cm of the position in
which is learnt in shaft learning, and ML1 or ML2 can not be encountered, it gives this error.
- Check ML1 and ML2 magnetic switches.
TÜRKÇE
- Check the door zone magnet. Magnet may be slided. Perform shaft learning process again.
40-Earthquake sensor activated: If DEP input is active, this error occurs.
- Check that in the programmable inputs, assigned DEP input has energy or not.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
41- 817 signal was not OFF when it should: If the car is below 817 magnet, 817 signal should be zero.
Otherwise it gives this error.
- The magnets 817 may have slided. The chains may have slided too much. After correcting the positions, perform
shaft learning again.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
42-817 signal was not ON when it should: If the car is above 817 magnet, 817 signal should be one. Otherwise,
it gives this error.
- The magnets 817 may have slided or fall down. After correcting the positions, perform shaft learning again.
43-818 signal was not OFF when it should: If the car is above 818 magnet, 818 signal should be zero.
Otherwise, it gives this error.
- The magnets 818 may have slided. The chains may have slided too much. After correcting the positions, perform
shaft learning again.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
44-818 signal was not ON when it should: If the car is below 818 magnet, 818 signal should be one.
Otherwise, it gives this error.
- The magnets 818 may have slided or fall down. After correcting the positions, perform shaft learning again.
ARKEL 66 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
45-Door limit-switch fault: If a door limit switch is assigned as "connected" in P0013 and/or P0020 parameters,
but does not function as expected, this error is raised.
- Either the parameter should be selected “not used” or the limit-switch connection should be done correctly.
47-Brake resistor overheated: The temperature of brake resistor is estimated depending on the change of voltage
in the brake resistor. If the calculated value exceeds a certain value, this error occurs.
- Check that brake resistor is chosen suitable for Arcode.
- For the ventilation of brake resistor to be good, around the brake resistor should be empty, and open for ventilation.
48-Heatsink overheated: If IPM temperature exceeds the value of “P0774:heatsink overheat error threshold”, it
gives this error.
- Check that the fans are working well.
- Be sure that ventilation of control panel is good.
49-External error (XER1) signal activated: When this is activated, it stops the system immediately.
- Check that if the assigned input XER1 has signal or not. After signal position turns to OFF, within 5 seconds it turns
ENGLISH
to normal operation.
50-External error (XER2) signal activated: When this is activated, it stops the system at the nearest floor
level.
- Check that if the assigned input XER2 has signal or not. After signal position turns to OFF, within 5 seconds it turns
to normal operation.
51-External blocking signal (XBL1) activated: When this is activated, it stops the system immediately and
blocked.
TÜRKÇE
- Check that if the assigned input XBL1 has signal or not. After signal position turns to OFF, it requires either a reset
operation or turning the hand terminal to “inspection” and “normal” again, then it turns to normal operation.
52-External blocking signal (XBL2) activated: When this is activated, it stops the system at the nearest floor
level and blocked.
- Check that if the assigned input XBL2 has signal or not. After signal position turns to OFF, it requires either a reset
operation or turning the hand terminal to “inspection” and “normal” again, then it turns to normal operation.
53- Encoder direction is wrong: Change the encoder direction from the menu. Auto-tune must be done again
when the encoder direction is changed for gearless machine.
54- OGD Error: A shaky starting occurs when the anti roll back value is entered too high. This error may be faced
with in this case. Decrease gains of anti roll back.
55- Contactor dropped: When the movements starts, during movement, if 100 signal is cut for 100 milliseconds,
this error is received. The signal 100 that normally passes through open contacts of KPA, KPB and KFR contactors
comes to ARCODE’s EN input. There must be signal 100 in EN input when all the contactors are activated.
56- 817&818 cut at the same time: Both 817 and 818 signals are cut at the same time for 0,5 seconds, it gives
this error.
- Check 817,818 signals and their magnetic sensors.
- Check the power supply of magnetic sensors.
ARKEL 67 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
58-Current sensor offset fault: If U,V,W current sensor offset values are not interval of max. and min. accepted
values for 1 second, it gives this error.
- Check the current sensor values at the “info” and “system information” screen
- Get contact to Arkel support
59-Car moving on wrong direction: If the reference speed of car is positive and 817 signal turns to passive from
active, or if the reference speed of car is negative and 818 signal turns to passive from active, it gives this error.
- If the error is received during movement in the up direction, check 817 signal. If error is received during movement
in the down direction, check 818 signal.
- Check that there is no short circuit or cutting on 817,818 signals.
- Check that there is no crack on 817,818 conenction cables.
- Check the motor direction is correct by driving motor in inspection mode.
60-Door bridging failure: If a problem is detected about DBR board, this error is received.
- There may be a problem about DBR board.
ENGLISH
- ML1 and ML2 signals may get electrical noise.
61-UDI exception: CPU error. Get contact to Arkel support
62-Overflow exception: CPU error. Get contact to Arkel support
63-Watchdog timeout: CPU error. Get contact to Arkel support
71-Licence key (dongle) not found: This is related to “P0839” Arcode class. If “P0839” is chosen as Midline or
Highline, and there is no dongle, it gives this error. If it is Midline, the dongle which is proper to Midline should be used.
TÜRKÇE
If it is Highline, the dongle which is proper to Highline should be used.
72- Limited feature: - If "P0839 ARCODE class" is chosen ARCODE Basic and if one of the following cases
exists, it gives this error.
-"P0002: number of floors", if it is entered greater than 16.
-"P0135: maximum travel speed", if it is entered greater than 1,6 m/s.
-if the number of Arcode is more than 2 in the system.
-"P0890: Priority service function", if it is chosen as "Enabled".
-"P0942: Park floor selection method", if it is chosen as "park floor is selected by time zone”.
- If "P0839 ARCODE class" is chosen as ARCODE Midline and if one of the following cases exists, it gives this error.
-"P0002: number of floors", if it is entered greater than 24.
-"P0135: maximum travel speed", if it is entered greater than 2,5 m/s.
73- Detected entry inside shaft: When the shaft entry protection is active, if any of "(SPR*) Shaft entry
protection switch Floor-*" signals are active and the car is not on that floor, this error will be triggered. (Normally there
shouldn’t be any signal if the door is closed)
- Check the door contacts and signal positions of SPR programmable inputs.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
80-Current was near motor limit continuously: If motor current exceeds over the value which is the
multiplication of ”P0159 nominal motor current” and “P0429 motor overcurrent limit” for 6 seconds, it gives this error.
- Check motor parameters
ARKEL 68 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
- Check counter-weight
- Make sure you are using a suitable Arcode Power Class device for your application
- Check possible mechanical jammings in the shaft
81-Group identity conflict error: If there is a conflict between the elevator identities in the group, it gives this
error. “P0086 group identity” should be chosen for all elevators in a right way.
- Give a different ID for each elevators in the group by checking this parameter.
82-Number of stops of all lifts in the group must be same: If “P0002 number of floors” parameter is
entered different for the elevators in the group, it gives this error.
83-APRE could not be unlocked: If “P0788 Apre monitoring” parameter is ON, after brakes are opened, the apre
monitoring input (APRI) should be zero within 3 seconds. Otherwise, it gives this error.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
84-APRE could not be locked: If “P0788 Apre monitoring” parameter is ON, main contactor output(RP) and
ENGLISH
Apre triggering output(APRO) is zero, the apre monitoring input (APRI) should be 1 within the time “P0804 speed
governor locking time” parameter. Otherwise, it gives this error.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
85-Encoder reference error: "(P0868) Encoder coupling type" is set to "Indirect incremental encoder" and the
angle correction by reference signal exceeded 120 degrees (magnetic)
- Check encoder connections.
- Check encoder-motor mechanical coupling. Encoder wheel might be slipping.
- Check if Z-channel reference signal is correct
TÜRKÇE
86-UCM detected: If door is bridged and 140 or 130 is "0" and if one of ML1 or ML2 is "0", it gives this error.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
87-Out of re-level zone: If ”P0075 relevelling function” parameter is chosen as “Relevel using 141 and 142
signals” , when the car waits at floor, if 141 and 142 turn to zero, it gives this error.
If “P0075 relevelling function”parameter is chosen as “with Liftsense”, when the car waits at floor, if the value which is
read from Liftsense should be in the interval of +7 cm ve -7 cm. Otherwise it gives this error.
88-Overspeed on relevelling: If the speed on relevelling exceeds over the value which is entered “P0814
overspeed error limit on relevelling” parameter, it gives this error.
89-Could not hold car on starting: While starting to move, if the rotor rotates more than quarter-turn, it gives
this error.
- Adjust Anti-rollback PID gains. (KP and KD parameters)
90-Overspeed on pre-opening: While the door is bridged, if the speed of the car exceeds over the value which is
entered “P0813 overspeed error limit on pre-opening” parameter, it gives this error.
93-Maintenance time exceeded: When system time passes the date-time entered in maintenance time “P1006”
parameter, controller raises error. The system goes out of service until the time parameter is taken to a future date-time.
In order to enable “P1006” parameter, firstly “P1005” maintenance time control parameter should be set as “On”.
94-Car light fuse is blown: If 3-phases are OK in Arcode, but there is no voltage value(220V) on IBC, it gives this
error.
ARKEL 69 ARCODE
Downloaded from www.Manualslib.com manuals search engine
Arkel Elektrik Elektronik San. ve Tic. A.Ş. www.arkel.com.tr
95-Manual rescue (SEV key): If “P0810 Acceptance test tools” parameter is OFF and “MEM” signal is ON, this
error occurs.
96-UPS failed on test: If UPS test couldn’t be performed, it gives this error.
- Check the batteries.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
97-Direction change limit reached: "(P0964) Direction change count limit" is set to a non-zero value and the
direction change counter has exceeded this value.
- This function is usually used to limit the usage of plastic ropes according to their lifetime. After changing the ropes,
set (P0964) to the next desired limit value.
Note: This is a permanent error. In order to get rid of the permanent error case, look at Appendix-3.
98- One of critical devices is offline: During normal operation, if connection with a critical device is lost, the
controller raises error. (Triggering of this error may take about 20 seconds) For ex: Photocell (FSLA) input is assigned to
one of the programmable inputs of IBC board, and if there is a problem about the communication with IBC and main
controller, this error is triggered in normal operation. The critical programmable inputs are shown with red color in the
ENGLISH
programable input list.
-This error is about EN81-20 norms. Not to receive this error during installation, you should set the “Operation mode”
parameter as “Installation mode”.
TÜRKÇE
ARKEL 70 ARCODE
Downloaded from www.Manualslib.com manuals search engine
You might also like
- Elevator Mechanic's Helper: Passbooks Study GuideFrom EverandElevator Mechanic's Helper: Passbooks Study GuideNo ratings yet
- Pump Selection and Troubleshooting Field Guide-American Water Works Association (AWWA) (2009)Document109 pagesPump Selection and Troubleshooting Field Guide-American Water Works Association (AWWA) (2009)msaqibraza93100% (5)
- Arl-100 User Manual V21Document16 pagesArl-100 User Manual V21Manushaqe Jonuzi-Berisha80% (10)
- HD-One X: 35A/1000V 4A Kaçak Akim RolesiDocument5 pagesHD-One X: 35A/1000V 4A Kaçak Akim Rolesideribe sisayNo ratings yet
- 3-FRENIC Lift PDFDocument48 pages3-FRENIC Lift PDFMoran Martines100% (1)
- Arl-500 Programming Manual v18Document137 pagesArl-500 Programming Manual v18Anoop KumarNo ratings yet
- Rescue V Rescue V1.4 1.4: User'S ManualDocument36 pagesRescue V Rescue V1.4 1.4: User'S Manualbouabdallah badisNo ratings yet
- ARKEL Vision Setup and User Manual V14Document18 pagesARKEL Vision Setup and User Manual V14paul5791100% (1)
- Wiring For Arcode Elevator Control SystemDocument12 pagesWiring For Arcode Elevator Control SystemAhmed100% (1)
- ADrive MANUAL For Elevator PDFDocument80 pagesADrive MANUAL For Elevator PDFAssir El Djazairi50% (2)
- n0 - ARCODE Parameter Reference V11.enDocument75 pagesn0 - ARCODE Parameter Reference V11.enمحمد حسين100% (2)
- Mikrolift: CAUTION: These Cables Must Be 2,5mm NYAF !Document19 pagesMikrolift: CAUTION: These Cables Must Be 2,5mm NYAF !Dmitriy ShevchenkoNo ratings yet
- ARCODE EN81-21 Reset Instructions.V110.EnDocument3 pagesARCODE EN81-21 Reset Instructions.V110.EnSaighi HamzaNo ratings yet
- Arcube Quick Installation Guide V10.enDocument21 pagesArcube Quick Installation Guide V10.enducthangbk100% (2)
- Dinamove VerlindeDocument9 pagesDinamove Verlindehubert patiño monroy100% (1)
- Arcode Arpass Function User Manual.V114.enDocument7 pagesArcode Arpass Function User Manual.V114.enSaighi Hamza100% (1)
- ARL-200S: Lift ControllerDocument12 pagesARL-200S: Lift ControllerWesam Wesam100% (1)
- Arcode Quick Install enDocument22 pagesArcode Quick Install enAhmed67% (3)
- Arcode Param Ref ManDocument41 pagesArcode Param Ref ManAhmed67% (3)
- KM-30S User Manual.V122.enDocument16 pagesKM-30S User Manual.V122.enfarzin100% (2)
- EN Programming ELCO Micro-ANTS LEB02 Basic Encoder V2.2 26-10-2020Document35 pagesEN Programming ELCO Micro-ANTS LEB02 Basic Encoder V2.2 26-10-2020Renny Barragan100% (1)
- ISTRUZDocument32 pagesISTRUZhziarabNo ratings yet
- ARL-500 Electrical Diagrams V16.en Non RescueDocument82 pagesARL-500 Electrical Diagrams V16.en Non Rescueeng MGAN100% (1)
- ARL500 Error Messages ENG V19Document6 pagesARL500 Error Messages ENG V19Henri KleineNo ratings yet
- Qjwb004 2020 English Ver 1Document66 pagesQjwb004 2020 English Ver 1Fauzi AchmadNo ratings yet
- Electrical Diagrams Elevator ViluxDocument9 pagesElectrical Diagrams Elevator ViluxpatoNo ratings yet
- Best Presentation On VFDDocument68 pagesBest Presentation On VFDShahid AhmadNo ratings yet
- Eureka Air Curtains CatalogueDocument3 pagesEureka Air Curtains CatalogueSumit BhandariNo ratings yet
- ADL300 SYN FPRev0.603052016 PDFDocument144 pagesADL300 SYN FPRev0.603052016 PDFEvandro PavesiNo ratings yet
- ARCODE Compatible Absolute Encoders.V150.EnDocument3 pagesARCODE Compatible Absolute Encoders.V150.EnSaighi HamzaNo ratings yet
- ML60XS UserGuide A1Document5 pagesML60XS UserGuide A1Bojan DrljachaNo ratings yet
- Arl 200sDocument12 pagesArl 200sNenad Simonović75% (8)
- Momentum Plus: Lift Controller Operation ManualDocument57 pagesMomentum Plus: Lift Controller Operation Manualafvt100% (2)
- Akus-Sd Combi User Manual v12Document20 pagesAkus-Sd Combi User Manual v12Ahmad Hamouda100% (3)
- Schaefer VVD Flyer Arkel Arcode enDocument2 pagesSchaefer VVD Flyer Arkel Arcode enadda chariNo ratings yet
- KM-10 User Guide.V111.enDocument18 pagesKM-10 User Guide.V111.enSalah SalahNo ratings yet
- Arl-300 Electrical Diagrams V15Document112 pagesArl-300 Electrical Diagrams V15MajidKholadi100% (1)
- ABB Drive Selection GuideDocument12 pagesABB Drive Selection Guideprasad_rvsNo ratings yet
- Ars CX DX User Manual V11enDocument19 pagesArs CX DX User Manual V11enyounesNo ratings yet
- ARCODE Error Descriptions V11.EnDocument15 pagesARCODE Error Descriptions V11.EnKs Bharathiyar100% (9)
- Arcode Operations.V150.enDocument10 pagesArcode Operations.V150.enMohammed Qaid Alathwary100% (1)
- ARL-300 User Manual.V251.en-1ffDocument33 pagesARL-300 User Manual.V251.en-1ffNour Ben100% (1)
- Arcode Quick Installation Guide.V210.EnDocument27 pagesArcode Quick Installation Guide.V210.EnFidan LatifiNo ratings yet
- Nice 1000Document204 pagesNice 1000Elius AhmedNo ratings yet
- AREM Buttons and Descriptions.V100.EnDocument3 pagesAREM Buttons and Descriptions.V100.EnRadenko SkoroNo ratings yet
- Arem Mobile User Manual.V101.enDocument8 pagesArem Mobile User Manual.V101.enmicrocherietNo ratings yet
- Startup VDL200 Geared EngDocument7 pagesStartup VDL200 Geared EngSamih AlraghbanNo ratings yet
- ML65X Manual PDFDocument16 pagesML65X Manual PDFMohammad KazimNo ratings yet
- Trio CRP42A Permanent Magnet Manual (SN. 065)Document28 pagesTrio CRP42A Permanent Magnet Manual (SN. 065)GUILLERMO OSIMANINo ratings yet
- ARCODE Firmware Update V21.enDocument7 pagesARCODE Firmware Update V21.enaissa lakehalNo ratings yet
- TK 103 UserManualDocument8 pagesTK 103 UserManualYusuf OzkayNo ratings yet
- AREM Hardware Manual.V110.EnDocument3 pagesAREM Hardware Manual.V110.Enmicrocheriet100% (1)
- Car Connection Diagram PDFDocument1 pageCar Connection Diagram PDFHenri KleineNo ratings yet
- Firmware Updater Manual v13Document11 pagesFirmware Updater Manual v13paul5791No ratings yet
- G&Z SD Card Reconfiguration - V1.1 - enDocument8 pagesG&Z SD Card Reconfiguration - V1.1 - enAbenetherNo ratings yet
- AYBEY AC Series Lift Controller Manual PDFDocument13 pagesAYBEY AC Series Lift Controller Manual PDFsazzad hossainNo ratings yet
- InvDocument5 pagesInvKs Bharathiyar100% (1)
- MSP-16 MSP-32 Hardware Manual.V110.enDocument4 pagesMSP-16 MSP-32 Hardware Manual.V110.enEdhem SmailbegovićNo ratings yet
- FX-Cube-S Hardware Manual V100.enDocument4 pagesFX-Cube-S Hardware Manual V100.enВячеслав Якимов100% (3)
- PDF Arcode Error Descriptions V20en - Compress PDFDocument37 pagesPDF Arcode Error Descriptions V20en - Compress PDFhoangvanxuanNo ratings yet
- FX-CAN Hardware Manual.V111.EnDocument5 pagesFX-CAN Hardware Manual.V111.EnAli DiabNo ratings yet
- MicroZed v33Document18 pagesMicroZed v33Ken LeeNo ratings yet
- Adrive - User - Manuel - v17 - Manual of Adrive - GBR - V0506Document21 pagesAdrive - User - Manuel - v17 - Manual of Adrive - GBR - V0506Henri Kleine83% (6)
- 02 Chen G PDFDocument6 pages02 Chen G PDFAnonymous zzfx7mz3No ratings yet
- Design and Implement Color Sorting Machine Using ArduinoDocument6 pagesDesign and Implement Color Sorting Machine Using ArduinoCyber TycoonNo ratings yet
- Sysdrive JV Series Ac InverterDocument4 pagesSysdrive JV Series Ac Inverteri ccNo ratings yet
- Mugerwa Denis Proposal - .Document35 pagesMugerwa Denis Proposal - .Aodi Naboth100% (2)
- RPL201201H251301 EN Brochure 3Document11 pagesRPL201201H251301 EN Brochure 3vitor rodriguesNo ratings yet
- 22.service Machines For Flat CardsDocument24 pages22.service Machines For Flat CardsCraig MartinNo ratings yet
- Microsoft Word - Project - Section 1 - Electric Generators and MotorsDocument2 pagesMicrosoft Word - Project - Section 1 - Electric Generators and MotorsMelanie RamdassNo ratings yet
- Vp05 Vp07 Axitub Solid 2 400m 34 8 - UkDocument2 pagesVp05 Vp07 Axitub Solid 2 400m 34 8 - UkConstantin294No ratings yet
- Parte 1 Gd200a-Manual - V2.8 PDFDocument94 pagesParte 1 Gd200a-Manual - V2.8 PDFIng. Nahum Cesar Hernandez SorianoNo ratings yet
- ThesisDocument3 pagesThesisMarc Emil CasilaoNo ratings yet
- 2017 Summer Model Answer PaperDocument28 pages2017 Summer Model Answer Paper52. YASHRAJ RANSHURNo ratings yet
- Driver DM556 MDocument17 pagesDriver DM556 MjcernudaNo ratings yet
- IECEx BAS 10.0045X 000Document6 pagesIECEx BAS 10.0045X 000Marcos SiqueiraNo ratings yet
- Sundyne Vertical CatalogueDocument16 pagesSundyne Vertical CataloguegaluNo ratings yet
- Manual Bomba SumergibleDocument18 pagesManual Bomba SumergibleDavic LimachiNo ratings yet
- .Design and Study of Transmission System For Electric VehiclesDocument3 pages.Design and Study of Transmission System For Electric VehiclesprtiNo ratings yet
- Simplified Electric Vehicle Power Train Models andDocument6 pagesSimplified Electric Vehicle Power Train Models andSatyam SwarupNo ratings yet
- MECH3422 1516 13 Lifts Escalators02Document60 pagesMECH3422 1516 13 Lifts Escalators02Kelvin Yip100% (1)
- EasyChair Preprint 6319Document7 pagesEasyChair Preprint 6319Realistic ProductsNo ratings yet
- Worm Gear Speed Reducers: HDR SeriesDocument5 pagesWorm Gear Speed Reducers: HDR SeriesMuhammad Anan Akhbar NugrahaNo ratings yet
- Modeling of PMSM MotorDocument14 pagesModeling of PMSM MotorTun Lin NaingNo ratings yet
- Prototype of Wheel Chair Attachable E Hand BikeDocument7 pagesPrototype of Wheel Chair Attachable E Hand BikePAVIN ENGG0% (1)
- Isolators/Grounding Switches Data Sheets 110 KV Ab SwitchesDocument10 pagesIsolators/Grounding Switches Data Sheets 110 KV Ab SwitchesAnonymous MDkp0hnb3lNo ratings yet
- Fuzzy Logic Controller DesignDocument46 pagesFuzzy Logic Controller Designcleiton_ctbaNo ratings yet