You might also like
- Detailed Lesson Plan in General MathematicsDocument6 pagesDetailed Lesson Plan in General MathematicsAira Jane Irarum78% (18)
- Sorting Plastics Using NIR SpectroscopyDocument3 pagesSorting Plastics Using NIR SpectroscopyGautham KrishnanNo ratings yet
- 2015 SPECTARIS Photonics PDFDocument106 pages2015 SPECTARIS Photonics PDFrafael andres ortiz esparzaNo ratings yet
- CVP - Beginning Lighting For Machine Vision - Daryl Martin PDFDocument68 pagesCVP - Beginning Lighting For Machine Vision - Daryl Martin PDFS KumarNo ratings yet
- 1992SGSDesignersGuidetoPowerProductsApplicationManual2Ed 1182713547Document1,298 pages1992SGSDesignersGuidetoPowerProductsApplicationManual2Ed 1182713547analog changeNo ratings yet
- Fourier Transform Infrared (FT-IR) Microspectroscopy: Methods and ApplicationsDocument77 pagesFourier Transform Infrared (FT-IR) Microspectroscopy: Methods and ApplicationsmaopacificNo ratings yet
- Organic Spectroscopy 1: Michaelmas 2011Document26 pagesOrganic Spectroscopy 1: Michaelmas 2011SonaliNo ratings yet
- Weekly Update: Cosmic Muon GeneratorDocument2 pagesWeekly Update: Cosmic Muon GeneratorMartin MeierNo ratings yet
- Utf-8''exemplar AgarDocument9 pagesUtf-8''exemplar AgarZia Baerfuss-liaoNo ratings yet
- Hyperspectral Image Acquisition and AnalysisDocument55 pagesHyperspectral Image Acquisition and AnalysisYaseen MuhammadNo ratings yet
- InfiniteFocusSL - AliconaDocument4 pagesInfiniteFocusSL - AliconaGian RemundiniNo ratings yet
- Near-Infrared Spectroscopy: Comparison of Techniques: M. SchillingDocument9 pagesNear-Infrared Spectroscopy: Comparison of Techniques: M. SchillingDouglasNo ratings yet
- 04 Lec HandoutDocument5 pages04 Lec HandoutmickeydeanNo ratings yet
- UV-Vis Application - Quantitative Analysis Using Second-Order Derivative Spectrum No A349Document2 pagesUV-Vis Application - Quantitative Analysis Using Second-Order Derivative Spectrum No A349Ramon Trinidad De la ONo ratings yet
- Powder XRD Phase Analysis and Pattern Fitting TutorialDocument91 pagesPowder XRD Phase Analysis and Pattern Fitting TutorialFranciszek JanikNo ratings yet
- Optical Properties of VegetablesDocument31 pagesOptical Properties of VegetablesDONALD WAYNE CARBONELLNo ratings yet
- Mathematics: Trends in Super-High-Definition Imaging Techniques Based On Deep Neural NetworksDocument19 pagesMathematics: Trends in Super-High-Definition Imaging Techniques Based On Deep Neural NetworksRobert MaximilianNo ratings yet
- Hyperspectral Imaging: Techniques, Issues, and Applications: Antony Lam Human-Machine Interaction Systems EngineeringDocument54 pagesHyperspectral Imaging: Techniques, Issues, and Applications: Antony Lam Human-Machine Interaction Systems EngineeringYessica RosasNo ratings yet
- Paint It Cool! Pigments For Solar Heat Management in Paints PDFDocument12 pagesPaint It Cool! Pigments For Solar Heat Management in Paints PDFBoonyarit LurdgrienggraiyingNo ratings yet
- Lighting Techniques For Machine VisionDocument60 pagesLighting Techniques For Machine VisionNaresh KumarNo ratings yet
- Optica 7 4 280Document4 pagesOptica 7 4 280AriaNo ratings yet
- Scanners Accurrcy PDFDocument73 pagesScanners Accurrcy PDFdanielcorrea999No ratings yet
- Silicon Surface Texturing Using NH Oh Solution For Solar CellsDocument3 pagesSilicon Surface Texturing Using NH Oh Solution For Solar CellsAudrey Roberto SilvaNo ratings yet
- Lesson 1 XRD and Rietveld RefinementDocument34 pagesLesson 1 XRD and Rietveld Refinementdiegomez84No ratings yet
- Konica Centuria Super 1600 Film: Technical Data SheetDocument3 pagesKonica Centuria Super 1600 Film: Technical Data SheetRichard KingstonNo ratings yet
- Paper 3Document11 pagesPaper 3irjmssNo ratings yet
- Ustin SARP Lecture 4 Field Methods FridayDocument45 pagesUstin SARP Lecture 4 Field Methods Fridayjpeterson1100% (2)
- Design of Hollow Silica Nanospheres For High Efficiency Optical Devices ApplicationsDocument2 pagesDesign of Hollow Silica Nanospheres For High Efficiency Optical Devices ApplicationsAnonymous cgKtuWzNo ratings yet
- Laser Based Detection of Benzene ProjectDocument22 pagesLaser Based Detection of Benzene ProjectMohamad Abou DaherNo ratings yet
- EGSR07 BTDF PDFDocument12 pagesEGSR07 BTDF PDFnpunkdayNo ratings yet
- 10 - Lecture 2 Lithography 2017 - 2018 PDFDocument132 pages10 - Lecture 2 Lithography 2017 - 2018 PDFRishabhNo ratings yet
- Specification Mechelle 7500 Integrated With The DiCAM-PRO ICCD ...Document4 pagesSpecification Mechelle 7500 Integrated With The DiCAM-PRO ICCD ...Saranya VsNo ratings yet
- MM-593 Lecture-2 2023Document87 pagesMM-593 Lecture-2 2023ashmeelrafi18No ratings yet
- Jpa 218039Document2 pagesJpa 218039Marcos Hugo SalazarNo ratings yet
- Cloning Worksheet Winter 2011: Producing A Standard Curve To Determine DNA Fragment SizesDocument8 pagesCloning Worksheet Winter 2011: Producing A Standard Curve To Determine DNA Fragment SizesKAILEYNo ratings yet
- Medical Image Denoising and EnhancementDocument3 pagesMedical Image Denoising and EnhancementWaqar MirzaNo ratings yet
- Compression Using Thresholding On Signal/Image by Applying Wavelet AnalysisDocument4 pagesCompression Using Thresholding On Signal/Image by Applying Wavelet Analysiskurupati rakeshNo ratings yet
- Rietveld RefinementDocument37 pagesRietveld RefinementBruna CallegariNo ratings yet
- Technical_Quick_Reference_GuideDocument38 pagesTechnical_Quick_Reference_GuidesaffronarkwriterNo ratings yet
- Automobile Paint ChipsDocument4 pagesAutomobile Paint ChipsLely Zikri ZulhidayahNo ratings yet
- Apodized Model AlconDocument56 pagesApodized Model AlconDuong Hoai BaoNo ratings yet
- Wavelength-Selective Di Ffraction From Silica Thin-Film GratingsDocument8 pagesWavelength-Selective Di Ffraction From Silica Thin-Film GratingsAnderson ArboledaNo ratings yet
- Wong 2006Document8 pagesWong 2006Daniela Gonzalez BetancurNo ratings yet
- UV190002 E Roof PaintDocument1 pageUV190002 E Roof PaintwidyaNo ratings yet
- SpectralGuide - Duncan Spectral Configuration Guide For DuncanTech 3-CCD CamerasDocument7 pagesSpectralGuide - Duncan Spectral Configuration Guide For DuncanTech 3-CCD CamerascabrahaoNo ratings yet
- Final Report - Exp 2 Sem 2 18-19Document10 pagesFinal Report - Exp 2 Sem 2 18-19Cmdr AceNo ratings yet
- Jenway 74 76 Series BrochureDocument6 pagesJenway 74 76 Series BrochureSadik OunisNo ratings yet
- 3D Imaging by Confocal Scanning Fluorescence MicroscopyDocument10 pages3D Imaging by Confocal Scanning Fluorescence MicroscopyAnnisa HayatiNo ratings yet
- CHAPTER 2-MOLECULAR ABSORPTION SPECTROSCOPY - Part 4Document59 pagesCHAPTER 2-MOLECULAR ABSORPTION SPECTROSCOPY - Part 4fatin harrisNo ratings yet
- Buku Alat BeratDocument10 pagesBuku Alat BeratUZUMAKI NARUTONo ratings yet
- EPP Remote SensingDocument149 pagesEPP Remote SensingHajar IsahNo ratings yet
- Ir 090514Document16 pagesIr 090514ilyas taufikNo ratings yet
- Photonic Microwave Generation in The X-And K-Band Using Integrated Soliton MicrocombsDocument7 pagesPhotonic Microwave Generation in The X-And K-Band Using Integrated Soliton MicrocombsdabNo ratings yet
- SD Tech TLAS9004E 3Document8 pagesSD Tech TLAS9004E 3Du RoyNo ratings yet
- Vray Material Settings: COMP 423: Cadd For ArchitectureDocument18 pagesVray Material Settings: COMP 423: Cadd For ArchitectureMarvin GonzalesNo ratings yet
- Optical Characterization of Planar Semiconductro MicrocavitiesDocument52 pagesOptical Characterization of Planar Semiconductro Microcavitiessimon sanchisNo ratings yet
- Laser Raman SpectrometerDocument8 pagesLaser Raman SpectrometerMai PhuNo ratings yet
- A Comparative Study of Various Noise PDFDocument9 pagesA Comparative Study of Various Noise PDFalpesh kaushalNo ratings yet
- Tunable Multi Notch Digital Filters: A MATLAB Demonstration Using Real DataDocument7 pagesTunable Multi Notch Digital Filters: A MATLAB Demonstration Using Real DataChetan SharmaNo ratings yet
- Finger-Back Surface IeeeDocument6 pagesFinger-Back Surface IeeeArunadevi RajmohanNo ratings yet
- Elec2228 202021 02 Elec2228Document6 pagesElec2228 202021 02 Elec2228Jennie HsinNo ratings yet
- Spectral Unmixing for Hyperspectral Image ClassificationDocument7 pagesSpectral Unmixing for Hyperspectral Image ClassificationRavi MuthamalaNo ratings yet
- Learning Sparse Codes For Hyperspectral ImageryDocument16 pagesLearning Sparse Codes For Hyperspectral ImageryRavi MuthamalaNo ratings yet
- Dictionary Based Clustered Sparse Representation For Hyperspectral ImagesDocument7 pagesDictionary Based Clustered Sparse Representation For Hyperspectral ImagesRavi MuthamalaNo ratings yet
- Dictionary Learning For Hyperspectral Image Classification 1Document15 pagesDictionary Learning For Hyperspectral Image Classification 1Ravi MuthamalaNo ratings yet
- Frequency-Selective Signal Sensing With Sub-Nyquist Uniform Sampling SchemeDocument3 pagesFrequency-Selective Signal Sensing With Sub-Nyquist Uniform Sampling SchemeRavi MuthamalaNo ratings yet
- Image Compression & Transmission Through Digital Communication SystemDocument86 pagesImage Compression & Transmission Through Digital Communication SystemPushpendra SinghNo ratings yet
- Through-The-wall Radar Signal Classification Using DLDocument5 pagesThrough-The-wall Radar Signal Classification Using DLRavi MuthamalaNo ratings yet
- API 510 BasicsDocument40 pagesAPI 510 BasicsBalakumarNo ratings yet
- Burford-Exam 3 Spring 2018Document6 pagesBurford-Exam 3 Spring 2018api-430812455No ratings yet
- SGDJ PDFDocument334 pagesSGDJ PDFDouglas Rogério de CastroNo ratings yet
- Saej401v002 PDFDocument6 pagesSaej401v002 PDFLuis LujanoNo ratings yet
- PMR205 DR Shawn BakerDocument31 pagesPMR205 DR Shawn Bakerspiridon_andrei2011No ratings yet
- Preliminary Evaluation On Vegetative of Rambutan (Nephelium Lappaceum) in Sandy Tin-Tailing SoilDocument7 pagesPreliminary Evaluation On Vegetative of Rambutan (Nephelium Lappaceum) in Sandy Tin-Tailing SoilAJAST JournalNo ratings yet
- Essay - DnaDocument2 pagesEssay - Dnaapi-243852896No ratings yet
- Thyrotronic enDocument4 pagesThyrotronic enVladimirNo ratings yet
- Yanmar Mechnical PumpDocument16 pagesYanmar Mechnical Pump송성훈100% (9)
- FIKE RD Combo With Relief ValvesDocument11 pagesFIKE RD Combo With Relief ValvesAnkit GandhiNo ratings yet
- Meralco Bill 330370940102 04142023Document2 pagesMeralco Bill 330370940102 04142023Jha CruzNo ratings yet
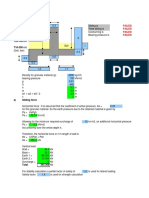
- Sliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallDocument4 pagesSliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallAbdul Aziz Julkarnain ZulkifliNo ratings yet
- Astm A 182-2021Document17 pagesAstm A 182-2021Mohammed AliNo ratings yet
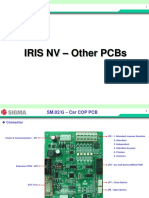
- 07 IRIS NV PCB OtherDocument15 pages07 IRIS NV PCB OtherArnaldo cordovaNo ratings yet
- History of FlightDocument10 pagesHistory of FlightHanin AlanaziNo ratings yet
- Memorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North CarolinaDocument7 pagesMemorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North Carolinaestela maria dulaganNo ratings yet
- Philips HF C-Arm BrochureDocument2 pagesPhilips HF C-Arm Brochuregarysov50% (2)
- ĐỀ SỐ 2Document98 pagesĐỀ SỐ 2van hoa nguyenNo ratings yet
- Encapsulation and Inheritance in Object-Orlented Programming LanguagesDocument8 pagesEncapsulation and Inheritance in Object-Orlented Programming Languageszsolt kormanyNo ratings yet
- EU Food Label GuidanceDocument99 pagesEU Food Label GuidanceMunteanu CristianNo ratings yet
- Bosch EBike Product Catalogue MY2021 enDocument92 pagesBosch EBike Product Catalogue MY2021 enIvanNo ratings yet
- Ceph Reference ArchitectureDocument12 pagesCeph Reference ArchitectureGermgmaan100% (1)
- HydrotherapyDocument52 pagesHydrotherapyMpt Sports100% (1)
- Demonstration POSTNATAL EXAMINATION Easy WayDocument9 pagesDemonstration POSTNATAL EXAMINATION Easy Wayjyoti singhNo ratings yet
- Brief History About Volley BallDocument1 pageBrief History About Volley BallAmbrad, Merlyn H.No ratings yet
- Computations on a waiters bill pad and conversations in the mistDocument3 pagesComputations on a waiters bill pad and conversations in the mistRavishu NagarwalNo ratings yet
- Ras Abu Aboud Stadium Daily Report 040 (20190613)Document4 pagesRas Abu Aboud Stadium Daily Report 040 (20190613)tuan50% (2)
- Auomotivr Fuel TanksDocument9 pagesAuomotivr Fuel Tankscolumba_mcNo ratings yet