You might also like
- Adaptive Control: According To Webster's DictionaryDocument20 pagesAdaptive Control: According To Webster's DictionaryMukesh Kumar VarmaNo ratings yet
- Introduction To Adaptive ControlDocument5 pagesIntroduction To Adaptive ControlroseNo ratings yet
- Lecture 1Document25 pagesLecture 1Munazzah TaimuriNo ratings yet
- Adaptive ControlDocument30 pagesAdaptive ControlPrateek MathurNo ratings yet
- 15 Chapter15 CorrectedDocument54 pages15 Chapter15 CorrectedSHUBHAM SAININo ratings yet
- Introduction To Adaptive ControlDocument3 pagesIntroduction To Adaptive ControlrajeshmholmukheNo ratings yet
- NSET-07: Adaptive Control Systems ATDocument15 pagesNSET-07: Adaptive Control Systems ATapi-19799369No ratings yet
- Iterative Feedback Tuning, Theory and ApplicationsDocument16 pagesIterative Feedback Tuning, Theory and ApplicationsHao LuoNo ratings yet
- Classification of Adaptive Control TechniquesDocument3 pagesClassification of Adaptive Control TechniquesLOKESHWARAN K CHEM-UG- 2017 BATCHNo ratings yet
- Adaptive Control 240118 100513Document27 pagesAdaptive Control 240118 100513SylviaNo ratings yet
- IFT CSMagazine98Document16 pagesIFT CSMagazine98Elleuch DorsafNo ratings yet
- Generalized Self-Tuning Regulator Based On Online Support VectorDocument27 pagesGeneralized Self-Tuning Regulator Based On Online Support VectorAkustika Horoz100% (1)
- MRAC vs STR ComparisonDocument1 pageMRAC vs STR Comparisonshadan alamNo ratings yet
- Assignment (1) Robust and Aduptive Cantrol Difference Between MRAC and STRDocument1 pageAssignment (1) Robust and Aduptive Cantrol Difference Between MRAC and STRshadan alamNo ratings yet
- Adaptive ControlDocument26 pagesAdaptive ControlKiran RavyNo ratings yet
- Null PDFDocument32 pagesNull PDFHammad HabibNo ratings yet
- Advanced PID ControlDocument15 pagesAdvanced PID ControlAldrian MacuaNo ratings yet
- AnswersDocument5 pagesAnswersShaik RoshanNo ratings yet
- 536 (Nguyen)Document20 pages536 (Nguyen)FernandootNo ratings yet
- PID Controllers and Fuzzy Auto-TuningDocument17 pagesPID Controllers and Fuzzy Auto-TuningBimbim Ahmad100% (1)
- CNC MID 2 KEYDocument6 pagesCNC MID 2 KEYpala srinivas reddyNo ratings yet
- Model Reference Adaptive ControlDocument57 pagesModel Reference Adaptive ControlmervebayrakNo ratings yet
- Adaptive Control: An Overview: Intan Zaurah Mat Darus, PHD C23 226, FKM, Utm 016 7616716Document15 pagesAdaptive Control: An Overview: Intan Zaurah Mat Darus, PHD C23 226, FKM, Utm 016 7616716Muhammad Aliuddin BakarNo ratings yet
- Control Systems FundamentalsDocument30 pagesControl Systems Fundamentalskhaled jNo ratings yet
- Marlin Ch13Document44 pagesMarlin Ch13Ashwin Kumar SabatNo ratings yet
- Sliding Mode Control PPT FinalDocument28 pagesSliding Mode Control PPT FinalBharatValaNo ratings yet
- Control AdaptativoDocument20 pagesControl AdaptativojoseNo ratings yet
- Introduction to Adaptive Control TechniquesDocument45 pagesIntroduction to Adaptive Control TechniquesTariq KhanNo ratings yet
- Model Refrence Adaptive Control Presentation by RishiDocument63 pagesModel Refrence Adaptive Control Presentation by RishiRishi Kant Sharma100% (5)
- 1815 07 PDFDocument9 pages1815 07 PDFsiamak001No ratings yet
- Mathematical Modelling of Engineering Problems: Received: 26 June 2022 Accepted: 22 October 2022Document7 pagesMathematical Modelling of Engineering Problems: Received: 26 June 2022 Accepted: 22 October 2022mustafa11dahamNo ratings yet
- Automatic Tuning and Adaptation For Pid Controllers-A SurveyDocument6 pagesAutomatic Tuning and Adaptation For Pid Controllers-A SurveySerethNo ratings yet
- Using: Control ControlDocument6 pagesUsing: Control ControlMarco BertoldiNo ratings yet
- Design Adaptive Controller UAVDocument2 pagesDesign Adaptive Controller UAVYasir MohiuddinNo ratings yet
- GAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFDocument6 pagesGAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFGlan DevadhasNo ratings yet
- Multi-domain computational models for biomedical engineeringDocument6 pagesMulti-domain computational models for biomedical engineeringDiana Carolina CameloNo ratings yet
- Introduction to Self Tuning Regulators (STRDocument25 pagesIntroduction to Self Tuning Regulators (STR15_01_1977_anand0% (1)
- Robust Computationally Efficient Control of Cooperative Closed-Chain Manipulators With Uncertain DynamicsDocument9 pagesRobust Computationally Efficient Control of Cooperative Closed-Chain Manipulators With Uncertain Dynamicsdung nguyenNo ratings yet
- PID auto-tuners for optimized controlDocument2 pagesPID auto-tuners for optimized controlAnonymous by1DIx6lhNo ratings yet
- Vector ControlDocument10 pagesVector ControlLove Shrimali0% (1)
- 2015-Article-MeriçÇetin-ISA Transactions-A Novel Auto-Tuning PID Control Mechanism For Nonlinear SystemsDocument17 pages2015-Article-MeriçÇetin-ISA Transactions-A Novel Auto-Tuning PID Control Mechanism For Nonlinear SystemsNadir Soner KaplanNo ratings yet
- Ica20110200001 94894672Document8 pagesIca20110200001 94894672Anggara T NugrahaNo ratings yet
- A New Adaptive PID Control ApproachDocument18 pagesA New Adaptive PID Control ApproachRabi Shankar ShilNo ratings yet
- Experiment 12 Instrumentation and Control LabDocument17 pagesExperiment 12 Instrumentation and Control LabAyesha KhurramNo ratings yet
- Classification of Adaptive Control TechniquesDocument4 pagesClassification of Adaptive Control TechniquesUmesh AhirraoNo ratings yet
- Effect of adaptation gain in MRAC controlled systemsDocument6 pagesEffect of adaptation gain in MRAC controlled systemskkaytugNo ratings yet
- Modelling of Induction Motor & Control of Speed Using Hybrid Controller TechnologyDocument10 pagesModelling of Induction Motor & Control of Speed Using Hybrid Controller TechnologyRamcharan GirajalaNo ratings yet
- A Relative Performance Monitor For Process Controllers PDFDocument24 pagesA Relative Performance Monitor For Process Controllers PDFp4ged0wnNo ratings yet
- Construction and Analysis of PID, Fuzzy and Predictive Controllers in Flow SystemDocument7 pagesConstruction and Analysis of PID, Fuzzy and Predictive Controllers in Flow SystemLuigi FreireNo ratings yet
- Using: Control ControlDocument6 pagesUsing: Control ControlRAJEEV RANJAN SILMANANo ratings yet
- This Control Is Free From Drift and Parameter Variations .The MainDocument9 pagesThis Control Is Free From Drift and Parameter Variations .The MainAnweshMishraNo ratings yet
- Chapter 24 Process ControlDocument36 pagesChapter 24 Process Controlavandetq15No ratings yet
- Minor Project Write UpDocument7 pagesMinor Project Write UpAviral UpadhyayNo ratings yet
- Automatic Tuning and Adaptation For Pid Controllers - A SurveyDocument16 pagesAutomatic Tuning and Adaptation For Pid Controllers - A SurveyTwistiesFifie FafauNo ratings yet
- Control System EngineeringDocument95 pagesControl System EngineeringAbdulrahmanNo ratings yet
- Design and Implementation of PID Controller in ProDocument6 pagesDesign and Implementation of PID Controller in ProBAGAS ADIYATMA Mahasiswa PNJNo ratings yet
- Adaptive Control - Wikipedia PDFDocument20 pagesAdaptive Control - Wikipedia PDFig: sidaryNo ratings yet
- Techniques for Adaptive ControlFrom EverandTechniques for Adaptive ControlVance VanDorenNo ratings yet
- مقر ةرضاحم 6 خيراتب 4 / 1 / 2021 Riveted (Bolted) JointsDocument8 pagesمقر ةرضاحم 6 خيراتب 4 / 1 / 2021 Riveted (Bolted) JointsroseNo ratings yet
- Distance and Angle Between Planes Math II ClassDocument3 pagesDistance and Angle Between Planes Math II ClassroseNo ratings yet
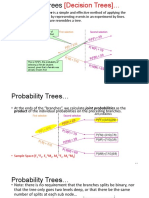
- Probability Trees and Posterior ProbabilitiesDocument15 pagesProbability Trees and Posterior ProbabilitiesroseNo ratings yet
- Vertical Curves:: A. Crest (Convex)Document8 pagesVertical Curves:: A. Crest (Convex)roseNo ratings yet
- 5 2019 02 14!11 31 22 PMDocument40 pages5 2019 02 14!11 31 22 PMroseNo ratings yet
- Obstacles During The Measurement:: The Obstacles Are Genearally Large Water Bodies, I.E Lakes, Rivers, EtcDocument6 pagesObstacles During The Measurement:: The Obstacles Are Genearally Large Water Bodies, I.E Lakes, Rivers, EtcroseNo ratings yet
- AutoCAD Drawing Editing Tools GuideDocument18 pagesAutoCAD Drawing Editing Tools GuideroseNo ratings yet
- Measures of DispersionDocument5 pagesMeasures of DispersionroseNo ratings yet
- Multiple Integrals: 2 Years 2 Semester Mathematics II (Multiple Integrals) Water Resources EngineeringDocument6 pagesMultiple Integrals: 2 Years 2 Semester Mathematics II (Multiple Integrals) Water Resources EngineeringroseNo ratings yet
- Open Chonnel Hydroulics: Basic Reiationships Continuity Equofion (4 - 3)Document19 pagesOpen Chonnel Hydroulics: Basic Reiationships Continuity Equofion (4 - 3)roseNo ratings yet
- Lecture 05 BDocument5 pagesLecture 05 BroseNo ratings yet
- Lecture 2: Drawing Basics - P1 : 1Document9 pagesLecture 2: Drawing Basics - P1 : 1roseNo ratings yet
- Series and Parallel Clipper CircuitsDocument11 pagesSeries and Parallel Clipper CircuitsroseNo ratings yet
- Lecture 4: Drawing Aid ToolsDocument16 pagesLecture 4: Drawing Aid ToolsroseNo ratings yet
- Area in Polar CoordinatesDocument7 pagesArea in Polar CoordinatesroseNo ratings yet
- Exomple Problem 4.'14 Temporary Channel LinerDocument20 pagesExomple Problem 4.'14 Temporary Channel LinerroseNo ratings yet
- Calibration of Pressure Gauge: Figure 2.1 Dead Weight Gage TesterDocument2 pagesCalibration of Pressure Gauge: Figure 2.1 Dead Weight Gage TesterroseNo ratings yet
- H Robust Control Problem: H Infinity Control Problem. To Design A Controller K(S) of A Control System ToDocument3 pagesH Robust Control Problem: H Infinity Control Problem. To Design A Controller K(S) of A Control System ToroseNo ratings yet
- An Introduction To FoundationsDocument4 pagesAn Introduction To FoundationsroseNo ratings yet
- Flowchart PDFDocument29 pagesFlowchart PDFJuan PorceleinNo ratings yet
- River Mechanics: Nonuniform Flow Chapter 4 (Graf, 1998)Document65 pagesRiver Mechanics: Nonuniform Flow Chapter 4 (Graf, 1998)roseNo ratings yet
- Signal and System NormsDocument15 pagesSignal and System NormsroseNo ratings yet
- Hydrology PDFDocument6 pagesHydrology PDFMohan Subhashkoneti KonetiNo ratings yet
- Introduction To Robust Control Systems: A System Is Robust When The System Has Acceptable Changes in Performance Due ToDocument7 pagesIntroduction To Robust Control Systems: A System Is Robust When The System Has Acceptable Changes in Performance Due ToroseNo ratings yet
- Adaptive Control: Non-Identifier-Based: - Gain SchedulingDocument5 pagesAdaptive Control: Non-Identifier-Based: - Gain SchedulingroseNo ratings yet
- Sensitivity of A Controlled System: S S G S K K S G L(S) GDocument3 pagesSensitivity of A Controlled System: S S G S K K S G L(S) GroseNo ratings yet
- Parameter Sensitivity Analysis of a Feedback Control SystemDocument14 pagesParameter Sensitivity Analysis of a Feedback Control SystemroseNo ratings yet
- Introduction To Robust Control SystemsDocument2 pagesIntroduction To Robust Control SystemsroseNo ratings yet
- ECOSYS M2030dn M2530dn M2035dn M2535dn SM UKDocument273 pagesECOSYS M2030dn M2530dn M2035dn M2535dn SM UKMaks Prost60% (5)
- The Life of The Last Pharaoh of EgyptDocument16 pagesThe Life of The Last Pharaoh of EgyptShanelle BarrilNo ratings yet
- Mercer Role and Job Analysis InfoDocument3 pagesMercer Role and Job Analysis InfojehaniaNo ratings yet
- The Separation of Coherent and Incoherent Compton X-Ray ScatteringDocument8 pagesThe Separation of Coherent and Incoherent Compton X-Ray ScatteringFaisal AmirNo ratings yet
- EnCORE V13.5 en EnglishDocument138 pagesEnCORE V13.5 en EnglishRommel SaavedraNo ratings yet
- Group ActDocument3 pagesGroup ActRey Visitacion MolinaNo ratings yet
- Endocrine System Diagnostic Text and Some DiseasesDocument3 pagesEndocrine System Diagnostic Text and Some Diseasesevangelo22656No ratings yet
- Formulas by LufkinDocument1 pageFormulas by LufkinSebastianCicognaNo ratings yet
- AllareDocument16 pagesAllareGyaniNo ratings yet
- LogDocument15 pagesLogandrew_hm925635No ratings yet
- ID26Document21 pagesID26Ashish BaidyanathanNo ratings yet
- AFPRP Final Group 25Document19 pagesAFPRP Final Group 25Pranay NitnawareNo ratings yet
- MsdsDocument6 pagesMsdsGis GeorgeNo ratings yet
- Manjit Thapp ResearchDocument24 pagesManjit Thapp ResearchDough RodasNo ratings yet
- Asc2104b-T I enDocument21 pagesAsc2104b-T I enELOUNDOU EVARISTE OHANDJANo ratings yet
- SMD 40kHz Ultrasonic Transducer MA40H1SR RevGMay 7 2014Document9 pagesSMD 40kHz Ultrasonic Transducer MA40H1SR RevGMay 7 2014robert wengerNo ratings yet
- Overview of Research ProcessDocument31 pagesOverview of Research Processprema balusamyNo ratings yet
- Fairfield Institute of Management & Technology E-Commerce: Lab/Practical File Subject Code: 112Document24 pagesFairfield Institute of Management & Technology E-Commerce: Lab/Practical File Subject Code: 112AYUSHNo ratings yet
- BCG ReportDocument9 pagesBCG Reportjlgjlj ljglkhNo ratings yet
- Template Project Approach QuestionnaireDocument1 pageTemplate Project Approach QuestionnaireSara AliNo ratings yet
- What ATF - CVTF To Use For ToyotaDocument7 pagesWhat ATF - CVTF To Use For ToyotaSydneyKasongoNo ratings yet
- THC124 - Lesson 1. The Impacts of TourismDocument50 pagesTHC124 - Lesson 1. The Impacts of TourismAnne Letrondo Bajarias100% (1)
- Analysis On Forgery Patterns For GPS Civil Spoofing SignalsDocument4 pagesAnalysis On Forgery Patterns For GPS Civil Spoofing SignalsMadhu KrishnaNo ratings yet
- Mental Status Examination FormatDocument7 pagesMental Status Examination FormatMala Rasaily100% (3)
- GCS Activity 2003Document33 pagesGCS Activity 2003donnottryNo ratings yet
- Critical Buckling Load of Pile in Liquefied SoilDocument8 pagesCritical Buckling Load of Pile in Liquefied SoilKefas JanuarNo ratings yet
- DP-10/DP-10T/DP-11/DP-15/DP-18 Digital Ultrasonic Diagnostic Imaging SystemDocument213 pagesDP-10/DP-10T/DP-11/DP-15/DP-18 Digital Ultrasonic Diagnostic Imaging SystemDaniel JuarezNo ratings yet
- Value YourselfDocument7 pagesValue YourselfTalha KhalidNo ratings yet
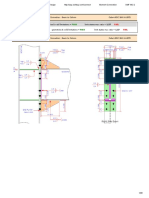
- Result Summary - Overall: Moment Connection - Beam To Column Code AISC 360-16 LRFDDocument29 pagesResult Summary - Overall: Moment Connection - Beam To Column Code AISC 360-16 LRFDYash Suthar100% (2)
- Monologue Speech in A Foreign Language LessonDocument3 pagesMonologue Speech in A Foreign Language LessonResearch ParkNo ratings yet