You might also like
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Modelo Okumura HataDocument15 pagesModelo Okumura HataCarlos FonsecaNo ratings yet
- Radio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericFrom EverandRadio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericNo ratings yet
- Mobile Mini Project HaziqDocument10 pagesMobile Mini Project HaziqAzmeer KamarudinNo ratings yet
- Simulation of Digital Communication Systems Using MatlabFrom EverandSimulation of Digital Communication Systems Using MatlabRating: 3.5 out of 5 stars3.5/5 (22)
- Okumura Vs Cost HattaDocument5 pagesOkumura Vs Cost HattaGregory LevantNo ratings yet
- Indoor Radio Planning: A Practical Guide for 2G, 3G and 4GFrom EverandIndoor Radio Planning: A Practical Guide for 2G, 3G and 4GRating: 5 out of 5 stars5/5 (1)
- IJARCCE3F S Sachin SuburbanDocument5 pagesIJARCCE3F S Sachin SuburbanIshan DarwhekarNo ratings yet
- Selection of Radio Propagation Model For Long Term Evolution (LTE) NetworkDocument7 pagesSelection of Radio Propagation Model For Long Term Evolution (LTE) NetworkPragati VatsaNo ratings yet
- 3 2 88Document4 pages3 2 88vishalnimavat1834No ratings yet
- Kocaeli University: OKUMURA, HATA and COST231 Propagation ModelsDocument36 pagesKocaeli University: OKUMURA, HATA and COST231 Propagation Modelsnina mimaNo ratings yet
- Okumura ModelDocument4 pagesOkumura Modelchuck333No ratings yet
- Okumura & Hatta Model: Made by Sobia Ali (20201-28924)Document13 pagesOkumura & Hatta Model: Made by Sobia Ali (20201-28924)Sobia AliNo ratings yet
- Path Loss Propagation ModelsDocument5 pagesPath Loss Propagation ModelsFarEast RamdzanNo ratings yet
- A Comparison of Path Loss Models For Wimax in Suburban and Open Urban EnvironmentsDocument5 pagesA Comparison of Path Loss Models For Wimax in Suburban and Open Urban EnvironmentsDoni FajarNo ratings yet
- Okumura Hata Model PDFDocument10 pagesOkumura Hata Model PDFali anwarNo ratings yet
- Researchpaper Performance Evaluation of Radio Propagation Models On GSM NetworkDocument7 pagesResearchpaper Performance Evaluation of Radio Propagation Models On GSM NetworkCarlos AlvarezNo ratings yet
- WMC Experiment-3 PDFDocument34 pagesWMC Experiment-3 PDFBlahNo ratings yet
- Expt-5 Lab Manual TE LabDocument10 pagesExpt-5 Lab Manual TE LabRuham RofiqueNo ratings yet
- Comparison of Empirical Propagation Path Loss Models For Mobile CommunicationDocument12 pagesComparison of Empirical Propagation Path Loss Models For Mobile CommunicationPablo PatricioNo ratings yet
- Comparison of Empirical Propagation Path Loss Models For Mobile CommunicationDocument12 pagesComparison of Empirical Propagation Path Loss Models For Mobile CommunicationTaha AlmoktarNo ratings yet
- Lte Cost 231 HataDocument8 pagesLte Cost 231 HataDiego Anonimo TorresNo ratings yet
- Path Loss Propagation Model For Rural and Semiurban Mobile EnvironmentDocument3 pagesPath Loss Propagation Model For Rural and Semiurban Mobile Environmentbenks_arfaNo ratings yet
- Comparison of Radio Propagation Models For Long Term Evolution LTE NetworkDocument15 pagesComparison of Radio Propagation Models For Long Term Evolution LTE NetworkOcira OyaroNo ratings yet
- Vidyavardhini's College of Engineering & TechnologyDocument6 pagesVidyavardhini's College of Engineering & Technology45SHRIRAKSHA.KOTEGARNo ratings yet
- T 121102Document8 pagesT 121102Ayman ElnasharNo ratings yet
- Types of Propagation Models & UseDocument12 pagesTypes of Propagation Models & UseArjun AslekarNo ratings yet
- Cost 231 HataDocument5 pagesCost 231 HataEdward TulipanNo ratings yet
- Performance Analysis of Empirical Propagation Models For Wimax in Urban EnvironmentDocument5 pagesPerformance Analysis of Empirical Propagation Models For Wimax in Urban EnvironmentKedir HassenNo ratings yet
- Path Loss Propagation Model Prediction For GSM Network PlanningDocument4 pagesPath Loss Propagation Model Prediction For GSM Network PlanningAnonymous tG4YlJqdyNo ratings yet
- Hata ModelDocument3 pagesHata Modelchuck333No ratings yet
- Pathloss Model Evaluation For Long Term Evolution in OwerriDocument6 pagesPathloss Model Evaluation For Long Term Evolution in OwerriInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- B&W 4 CopiesDocument29 pagesB&W 4 Copiessiddhisawant0303No ratings yet
- Radio Propagation Models Comparison and Tuning For LTE Based On Experimental Data in Tripoli-LibyaDocument4 pagesRadio Propagation Models Comparison and Tuning For LTE Based On Experimental Data in Tripoli-LibyaTaha AlmoktarNo ratings yet
- Bahria University (Karachi Campus) : Department of Electrical Engineering Assignment # 03Document11 pagesBahria University (Karachi Campus) : Department of Electrical Engineering Assignment # 03rizwan ahmedNo ratings yet
- OUeBulletin 1 Paper 67Document6 pagesOUeBulletin 1 Paper 67Mali VelikiNo ratings yet
- WC LAB Manual FinalDocument73 pagesWC LAB Manual FinalhtasarpnuraNo ratings yet
- IaesarticleDocument10 pagesIaesarticleندى عمريNo ratings yet
- 06 Cell Range GCDocument26 pages06 Cell Range GCamarjith1341No ratings yet
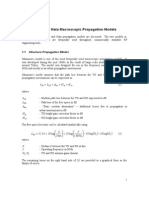
- RF Propagation - 07-Okumura and Hata Macroscopic Propagation ModelsDocument8 pagesRF Propagation - 07-Okumura and Hata Macroscopic Propagation ModelsHirak Jyoti MazumdarNo ratings yet
- A Systematic Evaluation of Link Budget For Effective 900Mhz GSM Communication ServicesDocument7 pagesA Systematic Evaluation of Link Budget For Effective 900Mhz GSM Communication ServicesCuongDolaNo ratings yet
- RF Propagation - 07-Okumura and Hata Macroscopic Propagation ModelsDocument8 pagesRF Propagation - 07-Okumura and Hata Macroscopic Propagation ModelsHamouda AzzouzNo ratings yet
- Automated Cell Based On Propagation: Planning LossDocument5 pagesAutomated Cell Based On Propagation: Planning LossNur AfiyatNo ratings yet
- OkumuraHata Jungla VHFDocument7 pagesOkumuraHata Jungla VHFEBEN EZERNo ratings yet
- Comparative Analysis of Empirical Path Loss Model For Cellular Transmission in Rivers StateDocument8 pagesComparative Analysis of Empirical Path Loss Model For Cellular Transmission in Rivers StateAJER JOURNALNo ratings yet
- To Develop A Model For 4g LTE and Predictable 5GDocument7 pagesTo Develop A Model For 4g LTE and Predictable 5GIJRASETPublicationsNo ratings yet
- Evaluation For Suitable Large-Scale Propagation Models To Mobile Communications in Urban-AreaDocument7 pagesEvaluation For Suitable Large-Scale Propagation Models To Mobile Communications in Urban-Areawww.irjes.comNo ratings yet
- 07 01 RA41207EN60GLA0 Cell RangeDocument35 pages07 01 RA41207EN60GLA0 Cell RangeMrr RithNo ratings yet
- Faculty of Engineering: Laboratory Report Cover SheetDocument17 pagesFaculty of Engineering: Laboratory Report Cover SheetZobaeir Akanda RatulNo ratings yet
- 22f4 PDFDocument7 pages22f4 PDFAnonymous tG4YlJqdyNo ratings yet
- Comparison of Propagation Models Accuracy For Wimax On 3.5 GHZDocument4 pagesComparison of Propagation Models Accuracy For Wimax On 3.5 GHZAziz Ur RehmanNo ratings yet
- Purple and Black Simple Technology Keynote PresentationDocument19 pagesPurple and Black Simple Technology Keynote Presentationishika.sarkar.501No ratings yet
- Unit 2 1Document24 pagesUnit 2 1ramjiNo ratings yet
- Neural Network Approach To Model The Propagation Path Loss For Great Tripoli Area at 900, 1800, and 2100 MHZ BandsDocument6 pagesNeural Network Approach To Model The Propagation Path Loss For Great Tripoli Area at 900, 1800, and 2100 MHZ BandsAminaNo ratings yet
- Rabbi 006Document8 pagesRabbi 006nawar khanNo ratings yet
- Project Report Group 3Document18 pagesProject Report Group 3api-728571121No ratings yet
- Advanced Wireless Communication: Prajeesha Prajeeshaemmanuel@pes - EduDocument18 pagesAdvanced Wireless Communication: Prajeesha Prajeeshaemmanuel@pes - EduOmkar KanetkarNo ratings yet
- Analyzing Study of Path Loss Propagation Models in Wireless Communications at 0.8 GHZDocument9 pagesAnalyzing Study of Path Loss Propagation Models in Wireless Communications at 0.8 GHZTaha AlmoktarNo ratings yet
- LTE Coverage Network Planning and Comparison With Different Propagation ModelsDocument10 pagesLTE Coverage Network Planning and Comparison With Different Propagation ModelszakiNo ratings yet
- Ec3501 WC LabDocument34 pagesEc3501 WC LabKAARUNYA S R - 20ITA17No ratings yet
- A. Donald Norman's Model:: Name of Student: Sobia Ali ID: 20201-28924Document4 pagesA. Donald Norman's Model:: Name of Student: Sobia Ali ID: 20201-28924Sobia AliNo ratings yet
- Assignment 3Document4 pagesAssignment 3Sobia AliNo ratings yet
- Lab Experiment 3 OsDocument11 pagesLab Experiment 3 OsSobia AliNo ratings yet
- How To Install Windows 10 On Your PC: Lab Experiment # 2Document14 pagesHow To Install Windows 10 On Your PC: Lab Experiment # 2Sobia AliNo ratings yet
- Drugs and Medicines: Top 15 Importer CountriesDocument3 pagesDrugs and Medicines: Top 15 Importer CountriesSobia AliNo ratings yet
- Inflation and Its Impact On Pakistans EconomyDocument10 pagesInflation and Its Impact On Pakistans EconomySobia AliNo ratings yet
- CPM Pert PracticeDocument1 pageCPM Pert PracticeSobia AliNo ratings yet
- Main Componets of GSMDocument6 pagesMain Componets of GSMSobia AliNo ratings yet
- Project Report: Mobile Computing - CSC443Document25 pagesProject Report: Mobile Computing - CSC443Sobia AliNo ratings yet
- Assignment 01Document1 pageAssignment 01Sobia AliNo ratings yet
- Insert Element in The Array AlgorithmDocument3 pagesInsert Element in The Array AlgorithmSobia AliNo ratings yet
- Flip-Flop ElectronicsDocument24 pagesFlip-Flop ElectronicsSobia AliNo ratings yet
- Okumura & Hatta Model: Made by Sobia Ali (20201-28924)Document13 pagesOkumura & Hatta Model: Made by Sobia Ali (20201-28924)Sobia AliNo ratings yet
- GSM Q&aDocument21 pagesGSM Q&aakpan.uNo ratings yet
- Inventarisasi 3Document4 pagesInventarisasi 3Florentinus Budi SetiawanNo ratings yet
- Trimble TDLCONF Software: User GuideDocument34 pagesTrimble TDLCONF Software: User GuideReynold YandyNo ratings yet
- UAV Flight ChecklistDocument3 pagesUAV Flight ChecklistLuXi LuXiNo ratings yet
- Automatic Vehicle Identification Using RFIDDocument26 pagesAutomatic Vehicle Identification Using RFIDPratham KhandelwalNo ratings yet
- Features: P-9903 Loop Relay ModuleDocument2 pagesFeatures: P-9903 Loop Relay ModuleHiteshgangeleNo ratings yet
- Fire Alarm Report1Document34 pagesFire Alarm Report1Waheed Riaz SanghiNo ratings yet
- Leader Ls 8022 8050 Service ManualDocument84 pagesLeader Ls 8022 8050 Service Manualjonathan calderaNo ratings yet
- BA3126N Datasheet PDFDocument7 pagesBA3126N Datasheet PDFGilbertoAdonayGutierrezNo ratings yet
- Warnings and Instructions For Consumers in Transporting, Storing, Handling and Using Explosive MaterialsDocument35 pagesWarnings and Instructions For Consumers in Transporting, Storing, Handling and Using Explosive Materials123098qwepoiNo ratings yet
- Rssi Ul DL PDFDocument7 pagesRssi Ul DL PDFTatsu OtakuNo ratings yet
- CMW500 - Specifications PDFDocument72 pagesCMW500 - Specifications PDFAlvaro Cea Campos100% (1)
- Preliminary : Product Data Sheet Apxvrr13T-CDocument2 pagesPreliminary : Product Data Sheet Apxvrr13T-CLenin Alejandro Ramirez Huaypatin100% (1)
- Operation Guide 5061: About This ManualDocument6 pagesOperation Guide 5061: About This ManualAtanas VeselinovNo ratings yet
- CQ Datv68Document35 pagesCQ Datv68Black OnionNo ratings yet
- The Radio Amateurs VHF ManualDocument354 pagesThe Radio Amateurs VHF ManualJosé ManuelNo ratings yet
- Sailing Directions Philippine Islands 2017Document374 pagesSailing Directions Philippine Islands 2017Rachel Erica Buesing100% (1)
- 1.basic Coms Noise - 2018rgs PDFDocument4 pages1.basic Coms Noise - 2018rgs PDFJefrilAmboyNo ratings yet
- Appendix II-Private Pilot Licence Written Examination SyllabusDocument5 pagesAppendix II-Private Pilot Licence Written Examination SyllabusRaviChandraNo ratings yet
- Anti-Collision Light Systems Installation and Service Manual JANUARY, 2007Document52 pagesAnti-Collision Light Systems Installation and Service Manual JANUARY, 2007johnnysNo ratings yet
- RNP APCH Down To LPV Minima: Flight Crew Basic Theoretical Training ForDocument102 pagesRNP APCH Down To LPV Minima: Flight Crew Basic Theoretical Training ForAleš Štimec100% (1)
- Fifth Generation (5G) Wireless Technology "Revolution in Telecommunication"Document7 pagesFifth Generation (5G) Wireless Technology "Revolution in Telecommunication"Angelo RubiaNo ratings yet
- Intelsat 39 Fact SheetDocument2 pagesIntelsat 39 Fact Sheetphyomauk htunNo ratings yet
- 02.04.2022 - 02.10.2022 - Gov. Wolf CalendarDocument7 pages02.04.2022 - 02.10.2022 - Gov. Wolf CalendarGovernor Tom WolfNo ratings yet
- Adcom Experiment No. 4: Aditya Prasad Mba Tech. Extc Sem V J045 C3 27 August, 2021Document5 pagesAdcom Experiment No. 4: Aditya Prasad Mba Tech. Extc Sem V J045 C3 27 August, 2021Shubham SharmaNo ratings yet
- Teletronik Drop Cables Catalogue PDFDocument19 pagesTeletronik Drop Cables Catalogue PDFAleksandar TasicNo ratings yet
- Victor RC-T1MDDocument14 pagesVictor RC-T1MDjoeynagaNo ratings yet
- Teambuilder LOST AT SEADocument5 pagesTeambuilder LOST AT SEAVickyMelliadoNo ratings yet
- Practical Guide To Cable SelectionDocument12 pagesPractical Guide To Cable Selectionazitagg100% (1)
- Drop Passives Splitters Couplers and Power Inserters ANSI - SCTE 153 2008Document11 pagesDrop Passives Splitters Couplers and Power Inserters ANSI - SCTE 153 2008Yung SangNo ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyFrom EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyNo ratings yet
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- The Beginning of Infinity: Explanations That Transform the WorldFrom EverandThe Beginning of Infinity: Explanations That Transform the WorldRating: 5 out of 5 stars5/5 (60)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (410)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1396)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldFrom EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Let There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessFrom EverandLet There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessRating: 4.5 out of 5 stars4.5/5 (57)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (49)
- The End of Everything: (Astrophysically Speaking)From EverandThe End of Everything: (Astrophysically Speaking)Rating: 4.5 out of 5 stars4.5/5 (157)
- A Natural History of Color: The Science Behind What We See and How We See itFrom EverandA Natural History of Color: The Science Behind What We See and How We See itRating: 4 out of 5 stars4/5 (13)
- Chasing Heisenberg: The Race for the Atom BombFrom EverandChasing Heisenberg: The Race for the Atom BombRating: 4.5 out of 5 stars4.5/5 (8)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeRating: 4.5 out of 5 stars4.5/5 (3)
- AP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeFrom EverandAP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeNo ratings yet