You might also like
- Data Science Theory, Analysis and Applications - Memon - AhmedDocument345 pagesData Science Theory, Analysis and Applications - Memon - Ahmedenock-readersNo ratings yet
- The WayDocument111 pagesThe Waykayesmoney100% (4)
- Understanding TelekinesisDocument8 pagesUnderstanding Telekinesistdt9a50% (2)
- JB183 EAP7.0 en 2 20180124 IG 1 PDFDocument78 pagesJB183 EAP7.0 en 2 20180124 IG 1 PDFM-CHNo ratings yet
- Controlling Sex and Decency in Advertising Around The WorldDocument12 pagesControlling Sex and Decency in Advertising Around The WorldShwetha ShekharNo ratings yet
- Frequency Distribution TableDocument14 pagesFrequency Distribution TableLizlette Ianne100% (2)
- Kevin Russell - Qiong Shen - Raj S. Sodhi - Kinematics and Dynamics of Mechanical Systems - Implementation in MATLAB® and SimMechanics®-CRC Press (2018) PDFDocument535 pagesKevin Russell - Qiong Shen - Raj S. Sodhi - Kinematics and Dynamics of Mechanical Systems - Implementation in MATLAB® and SimMechanics®-CRC Press (2018) PDFMARCUS.VARANIS874850% (2)
- Build Your Own Teams of Robots with LEGO® Mindstorms® NXT and Bluetooth®From EverandBuild Your Own Teams of Robots with LEGO® Mindstorms® NXT and Bluetooth®No ratings yet
- In28Minutes Course GuideDocument28 pagesIn28Minutes Course GuidePriyanka SahniNo ratings yet
- Cybersecurity Space Operation Center Countering Cyber Threats in The Space Domain PDFDocument20 pagesCybersecurity Space Operation Center Countering Cyber Threats in The Space Domain PDFKarimNo ratings yet
- Brand Key WorkshopDocument16 pagesBrand Key WorkshopNaved Ahmad100% (1)
- ISBN: 978-1-4200-4624-3: Human Factors and Ergonomics in Consumer Product DesignDocument512 pagesISBN: 978-1-4200-4624-3: Human Factors and Ergonomics in Consumer Product DesignDanielaHenriquesNo ratings yet
- Gender and Social Inclusion TrainingDocument49 pagesGender and Social Inclusion TrainingChusana HanNo ratings yet
- Creative Coding Through Games and AppsDocument50 pagesCreative Coding Through Games and AppsMr. XNo ratings yet
- Computer Vision Object Detection in Adversarial Vision (Bhowmik, Mrinal Kanti Etc.) (Z-Library)Document209 pagesComputer Vision Object Detection in Adversarial Vision (Bhowmik, Mrinal Kanti Etc.) (Z-Library)parametersNo ratings yet
- Advanced Topics On Computer Vision Control and Robotics in MechatronicsDocument431 pagesAdvanced Topics On Computer Vision Control and Robotics in MechatronicsefrainNo ratings yet
- Hermeneutical PhenomenologyDocument12 pagesHermeneutical PhenomenologySean Wasil100% (4)
- R12 Compensation Activity GuideDocument224 pagesR12 Compensation Activity Guidepersonifiedgenius0% (1)
- MEAL-DPro-03 29 2019Document141 pagesMEAL-DPro-03 29 2019jwmeadow2401100% (1)
- The Neuroscientific Study of Spiritual Practices - Andrew B. NewbergDocument6 pagesThe Neuroscientific Study of Spiritual Practices - Andrew B. NewbergFabricioFernandezNo ratings yet
- Classification of Hospitals DOHDocument2 pagesClassification of Hospitals DOHAnjo Aglugub100% (2)
- Ebook Ceh Certified Ethical Hacker Practice Exams 5Th Edition PDF Full Chapter PDFDocument67 pagesEbook Ceh Certified Ethical Hacker Practice Exams 5Th Edition PDF Full Chapter PDFmary.johnson764100% (22)
- How To Build Your Own Social Media Monitoring Service - Marshall Sponder - Webmetricsguru - Dot - Com - 3!31!2010 - V2Document173 pagesHow To Build Your Own Social Media Monitoring Service - Marshall Sponder - Webmetricsguru - Dot - Com - 3!31!2010 - V2Webmetricsguru100% (1)
- Online Recruitment SystemDocument39 pagesOnline Recruitment SystemEmmanuel Lewa100% (1)
- Crowd SimulationDocument249 pagesCrowd SimulationImran MahmoodNo ratings yet
- Modeling and SimulationDocument29 pagesModeling and SimulationMiloradNo ratings yet
- Conceptual Modeling For Discrete-Event SimulationDocument530 pagesConceptual Modeling For Discrete-Event SimulationFabian Augusto Molina MartinezNo ratings yet
- Assessing The Impact of Playing Flight Simulators Video Games On The Skill Development of Student Pilots in FlyingDocument34 pagesAssessing The Impact of Playing Flight Simulators Video Games On The Skill Development of Student Pilots in FlyingRazhimae TangalinNo ratings yet
- Online Training in An Online World: Co-Sponsored byDocument149 pagesOnline Training in An Online World: Co-Sponsored bysalsabilaNo ratings yet
- Getting Started With The Java 3D API: InteractionDocument64 pagesGetting Started With The Java 3D API: InteractionBilal ChNo ratings yet
- Abdullahi Said MohamedDocument103 pagesAbdullahi Said MohamedRohitha6lasanthaNo ratings yet
- Online Scouting System - Adablah P. Delali - David Yeboah Lamptey - Agyekum Alex BoatengDocument36 pagesOnline Scouting System - Adablah P. Delali - David Yeboah Lamptey - Agyekum Alex BoatengAJ WolfyNo ratings yet
- 0JT ReportDocument44 pages0JT ReportCHIMI WANGMONo ratings yet
- Research Report On Social Networking Site Usage Pattern: Team MembersDocument58 pagesResearch Report On Social Networking Site Usage Pattern: Team MembersDaksh AnandNo ratings yet
- Designing Interactive Technology For Skateboarding: Sebastiaan Pijnappel Florian Floyd' MuellerDocument8 pagesDesigning Interactive Technology For Skateboarding: Sebastiaan Pijnappel Florian Floyd' MuelleraxiomatizadorrNo ratings yet
- Osuva 5611Document108 pagesOsuva 5611vinfer84No ratings yet
- Research Weebly FinalDocument12 pagesResearch Weebly Finalapi-535308345No ratings yet
- Traffic ReportDocument68 pagesTraffic ReportsudarshanNo ratings yet
- 310CT Assignment 1StudAsgnDocument23 pages310CT Assignment 1StudAsgnrenz testNo ratings yet
- On Reputation Evaluation in Online Social NetworksDocument11 pagesOn Reputation Evaluation in Online Social NetworksCristian BrottoNo ratings yet
- Commissioned by Cooperation Committee FoDocument90 pagesCommissioned by Cooperation Committee FoNora LunNo ratings yet
- VR Application in Sport (Final Body)Document5 pagesVR Application in Sport (Final Body)Ashenafi PaulosNo ratings yet
- Computer Programming 2 Final ProjectDocument17 pagesComputer Programming 2 Final ProjectKocchi MatsunoNo ratings yet
- A Report On Existing AI Work For Visually Impaired People: Ayesha TariqDocument51 pagesA Report On Existing AI Work For Visually Impaired People: Ayesha TariqAyeshaNo ratings yet
- Gam If IcationDocument27 pagesGam If IcationAlin2003No ratings yet
- Recon Rally: The User Experience Design Behind The RallyDocument18 pagesRecon Rally: The User Experience Design Behind The Rallyyaco_777No ratings yet
- AI Machine Learning Supply Chain Planning MIT CTL Nov 18 RTDocument19 pagesAI Machine Learning Supply Chain Planning MIT CTL Nov 18 RTragerahulNo ratings yet
- Application of Virtual Environment in The TeachingDocument13 pagesApplication of Virtual Environment in The TeachingCoach-NeilKhayechNo ratings yet
- A Concise Guide To Elicitation Methodology - Adam S Williams and Francisco OrtegaDocument62 pagesA Concise Guide To Elicitation Methodology - Adam S Williams and Francisco Ortegads0313No ratings yet
- 3D Object Recognition and Pose EstimationDocument97 pages3D Object Recognition and Pose EstimationDavidNo ratings yet
- I N R Abe C C: Nstructor Otes AND Esources FOR Omputer UrriculumDocument34 pagesI N R Abe C C: Nstructor Otes AND Esources FOR Omputer UrriculumMarvin RetutalNo ratings yet
- Model Based Decision Making in A Context Sensitive Advertisement SystemDocument25 pagesModel Based Decision Making in A Context Sensitive Advertisement SystemMark MooijNo ratings yet
- Visual Speech Animation: Lei Xie, Lijuan Wang, and Shan YangDocument1,899 pagesVisual Speech Animation: Lei Xie, Lijuan Wang, and Shan YangRicardo PietrobonNo ratings yet
- 四旋翼無人機與深度學習應用於停車格偵測Document63 pages四旋翼無人機與深度學習應用於停車格偵測prince111299211No ratings yet
- Report DT Apr2022Document69 pagesReport DT Apr2022Thayananthan MuniandyNo ratings yet
- Getting Started With The Java 3D API: InteractionDocument58 pagesGetting Started With The Java 3D API: InteractionKalidass BackNo ratings yet
- Eventory Final Paper PDFDocument47 pagesEventory Final Paper PDFmichell aguilarNo ratings yet
- Ceh Certified Ethical Hacker Practice Exams 5Th Edition Matt Walker Full ChapterDocument67 pagesCeh Certified Ethical Hacker Practice Exams 5Th Edition Matt Walker Full Chaptercarol.canale172100% (4)
- Modelling and Simulation TutorialDocument8 pagesModelling and Simulation TutorialChristine Mae CionNo ratings yet
- In The Digital Age, Training, Studying, As Well As Testing Are All PossibleDocument17 pagesIn The Digital Age, Training, Studying, As Well As Testing Are All PossibleBisma YounusNo ratings yet
- CPPSDocument20 pagesCPPSpaulshuvaNo ratings yet
- Online Student Union Voting SystemDocument58 pagesOnline Student Union Voting SystemMohammed MOLLA50% (2)
- Microsoft Word - Fall Catalog FinalDocument12 pagesMicrosoft Word - Fall Catalog FinalTammy Stephens100% (2)
- Face Recognition System: By: Yang Li Yli@My - Harrisburgu.EduDocument49 pagesFace Recognition System: By: Yang Li Yli@My - Harrisburgu.EduJyoNo ratings yet
- ProposalDocument24 pagesProposalBerig100% (1)
- Analysis and Implementation of E-Ticketing With Live ChatDocument125 pagesAnalysis and Implementation of E-Ticketing With Live ChatMd RashidunnabiNo ratings yet
- Non ConventionalDocument13 pagesNon ConventionalAkash KumarNo ratings yet
- Sol 3Document7 pagesSol 3Akash KumarNo ratings yet
- Ho NotesDocument9 pagesHo NotesAkash KumarNo ratings yet
- 509 of 2019 - 190120221448Document1 page509 of 2019 - 190120221448Akash KumarNo ratings yet
- Unit 11Document28 pagesUnit 11Akash KumarNo ratings yet
- Scan 19 MarDocument3 pagesScan 19 MarAkash KumarNo ratings yet
- 2nd Sem - Form FillingDocument2 pages2nd Sem - Form FillingAkash KumarNo ratings yet
- Aryabhatta Knowledge University, Patna: Rahul Kumar Verma 18102128016Document3 pagesAryabhatta Knowledge University, Patna: Rahul Kumar Verma 18102128016Akash KumarNo ratings yet
- OD226779319816028000Document1 pageOD226779319816028000Akash KumarNo ratings yet
- Scan 10 Aug 2021Document3 pagesScan 10 Aug 2021Akash KumarNo ratings yet
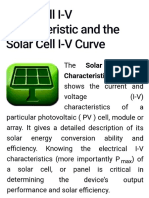
- Characteristic and The Solar Cell V CurveDocument8 pagesCharacteristic and The Solar Cell V CurveAkash KumarNo ratings yet
- Non Conventional Machining ProcessesDocument7 pagesNon Conventional Machining ProcessesAkash KumarNo ratings yet
- Abhi Fee StructureDocument1 pageAbhi Fee StructureAkash KumarNo ratings yet
- Working Principle: Laser Beam WeldingDocument14 pagesWorking Principle: Laser Beam WeldingAkash KumarNo ratings yet
- Fergusson College (Autonomous) Pune Learning Outcomes-Based Curriculum For M.A. I - EconomicsDocument21 pagesFergusson College (Autonomous) Pune Learning Outcomes-Based Curriculum For M.A. I - EconomicsAkash KumarNo ratings yet
- Un-Conventional Metal Forming: Saurabh Priyadarshi Asst. Professor (Mechanical Engg.) LNJPIT ChapraDocument15 pagesUn-Conventional Metal Forming: Saurabh Priyadarshi Asst. Professor (Mechanical Engg.) LNJPIT ChapraAkash KumarNo ratings yet
- Btech Me 6 Sem Non Conventional Manufacturing 021617 2019Document4 pagesBtech Me 6 Sem Non Conventional Manufacturing 021617 2019Akash KumarNo ratings yet
- Scan 22 Mar 2022Document14 pagesScan 22 Mar 2022Akash KumarNo ratings yet
- Un-Conventional Metal FormingDocument4 pagesUn-Conventional Metal FormingAkash KumarNo ratings yet
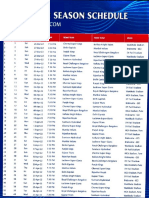
- 2022 Season Schedule: Match MatchDocument2 pages2022 Season Schedule: Match MatchAkash KumarNo ratings yet
- What Is Photochemical Smog?Document3 pagesWhat Is Photochemical Smog?Akash KumarNo ratings yet
- LBM 123Document7 pagesLBM 123Akash KumarNo ratings yet
- Lec 5Document19 pagesLec 5Akash KumarNo ratings yet
- Lec 4Document17 pagesLec 4Akash KumarNo ratings yet
- Lec3 CNCDocument18 pagesLec3 CNCAkash KumarNo ratings yet
- 1 Hour) : (Students Will Stand Silently) (In Unison)Document7 pages1 Hour) : (Students Will Stand Silently) (In Unison)Donnabel AganaNo ratings yet
- Kant's Theory of RightDocument11 pagesKant's Theory of RightXs SarahNo ratings yet
- Homeroom Guidance Module 2Document4 pagesHomeroom Guidance Module 2Chris LawrenceNo ratings yet
- Ted Talk Rhetorical Analysis-2Document4 pagesTed Talk Rhetorical Analysis-2api-512532175No ratings yet
- Ben Franklin's 12 Rules of ManagementDocument7 pagesBen Franklin's 12 Rules of Managementpeytonc.huckabeeNo ratings yet
- Lesson Plan Ten MathDocument2 pagesLesson Plan Ten Mathapi-300889911No ratings yet
- GLUP 1043 Legal Skill and Research MethodologyDocument23 pagesGLUP 1043 Legal Skill and Research MethodologyMe RiezNo ratings yet
- Bay Area College of Nursing Nursing Assistant Program Module 3: Communication & Interpersonal SkillsDocument14 pagesBay Area College of Nursing Nursing Assistant Program Module 3: Communication & Interpersonal Skillspilsen_01No ratings yet
- Birthday BoyDocument9 pagesBirthday BoyDheLinayahNo ratings yet
- Test SeriesDocument11 pagesTest SeriesSunnyAryaNo ratings yet
- Role of Motivationin Employees ProductivityDocument25 pagesRole of Motivationin Employees ProductivitySHIVANI SHARMANo ratings yet
- 1.5table of ContentsDocument2 pages1.5table of ContentsJohn Kevin DizonNo ratings yet
- Competent To Counsel Interactive PaperDocument3 pagesCompetent To Counsel Interactive PaperAlex DwyerNo ratings yet
- Mary Ann M. Mesias: Lo-Ok, Almeria, Biliran 6544 Mobile Number: +639 751383707Document5 pagesMary Ann M. Mesias: Lo-Ok, Almeria, Biliran 6544 Mobile Number: +639 751383707Mary Ann MesiasNo ratings yet
- ASDM ManualDocument28 pagesASDM ManualPranab KumarNo ratings yet
- Sociology Project: Topic - A Discourse On Theories of SocializationDocument19 pagesSociology Project: Topic - A Discourse On Theories of SocializationSumukh TiwariNo ratings yet
- Hla Hla San 2 Teaching ObservationDocument4 pagesHla Hla San 2 Teaching Observationapi-607051057No ratings yet
- Scotland County Dss Child Protective Services Overview SombDocument12 pagesScotland County Dss Child Protective Services Overview Sombapi-248130302No ratings yet
- 7 E Instructional Model: Coastal ProcessesDocument1 page7 E Instructional Model: Coastal ProcessesCharline A. RadislaoNo ratings yet
- Job Roles of Teaching AssistantsDocument12 pagesJob Roles of Teaching AssistantstrangngaNo ratings yet
- Comparative CriminologyDocument15 pagesComparative Criminologykweku Prah100% (1)