You might also like
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Clark Inflatable Supersonic Tension ConeDocument9 pagesClark Inflatable Supersonic Tension ConenaraNo ratings yet
- Cambridge Primary Checkpoint: Science 0846/01Document168 pagesCambridge Primary Checkpoint: Science 0846/01esraa ali100% (1)
- Undamped Forced VibrationDocument7 pagesUndamped Forced VibrationShilca Geniel BarriosNo ratings yet
- BOL LCD Math Week 1Document3 pagesBOL LCD Math Week 1Liomer Zabala-Mubo CredoNo ratings yet
- Stable Numerical Schemes for Fluids, Structures and their InteractionsFrom EverandStable Numerical Schemes for Fluids, Structures and their InteractionsNo ratings yet
- Advanced Dynamics of Structures 2Document31 pagesAdvanced Dynamics of Structures 2Halil ZeyrekNo ratings yet
- Advanced Dynamics of Structures 6Document21 pagesAdvanced Dynamics of Structures 6Halil ZeyrekNo ratings yet
- Advanced Dynamics of Structures 9Document52 pagesAdvanced Dynamics of Structures 9Halil ZeyrekNo ratings yet
- Advanced Dynamics of Structures 8Document24 pagesAdvanced Dynamics of Structures 8Halil ZeyrekNo ratings yet
- Advanced Dynamics of Structures 5Document28 pagesAdvanced Dynamics of Structures 5Halil ZeyrekNo ratings yet
- Mathematics Grade 10Document12 pagesMathematics Grade 10jamestutwa23No ratings yet
- Chapter 1-3Document68 pagesChapter 1-3Henok YalewNo ratings yet
- Lecture 3Document6 pagesLecture 3Milind BhatiaNo ratings yet
- 6 Work and EnergyDocument7 pages6 Work and EnergyHassan FulaihNo ratings yet
- Advanced Dynamics of Structures 7Document23 pagesAdvanced Dynamics of Structures 7Halil ZeyrekNo ratings yet
- Mechanical Vibrations Week 11: Quiz 2 AnnouncementDocument10 pagesMechanical Vibrations Week 11: Quiz 2 Announcementzak masterNo ratings yet
- PMS Theory Chapter2Document42 pagesPMS Theory Chapter2moulitechNo ratings yet
- Ph101: Physics 1Document19 pagesPh101: Physics 1Shrey GuptaNo ratings yet
- Mechanical Vibrations Single Degree-Of-Freedom Damped Free Vibration (Chapter TREE)Document26 pagesMechanical Vibrations Single Degree-Of-Freedom Damped Free Vibration (Chapter TREE)lawlawNo ratings yet
- Bohrs Atomic Model - Activity - AnoreDocument2 pagesBohrs Atomic Model - Activity - AnoreDaniel AnoreNo ratings yet
- 2021 Energy Conversion-Chapter 3-2-2Document15 pages2021 Energy Conversion-Chapter 3-2-2김동현No ratings yet
- Stiffness 1Document31 pagesStiffness 1ahmed elgendyNo ratings yet
- Damping: Single Degree of FreedomDocument28 pagesDamping: Single Degree of FreedomAbdulrahmanNo ratings yet
- Generator - Load ModellingDocument3 pagesGenerator - Load ModellingYoussef EzatNo ratings yet
- Formula Sheet FE - W21Document3 pagesFormula Sheet FE - W21debbyNo ratings yet
- Lec 30Document4 pagesLec 30Ali RajaNo ratings yet
- (ENG) Centre of Mass. Centroid and Moments of Inertia of Plane AreasDocument26 pages(ENG) Centre of Mass. Centroid and Moments of Inertia of Plane Areaslecacarla100No ratings yet
- Annual ReviewDocument34 pagesAnnual ReviewVijayshankar YadavNo ratings yet
- Notes Phys300Document311 pagesNotes Phys300armagandgstnNo ratings yet
- AP 物理C电磁 Open NoteDocument13 pagesAP 物理C电磁 Open Note2116542130No ratings yet
- Load FlowDocument41 pagesLoad FlowSmida ChahinezNo ratings yet
- More Topics For Finite Element MethodDocument8 pagesMore Topics For Finite Element MethodJohn Mark Go PayawalNo ratings yet
- Lecture 2 Second Lecture 2023Document21 pagesLecture 2 Second Lecture 2023yakwetuNo ratings yet
- CIEM 5390 Lecture Notes Set 6Document16 pagesCIEM 5390 Lecture Notes Set 6lastbald3No ratings yet
- SWK211 Notes On VibrationDocument5 pagesSWK211 Notes On VibrationSimphiwe BenyaNo ratings yet
- Hagen Poisuille EquationDocument4 pagesHagen Poisuille EquationRochakNo ratings yet
- Document 5Document62 pagesDocument 5MUHAMMAD NUR AMNI KHARIMANNo ratings yet
- Lecture Note For FCG - CCGDocument9 pagesLecture Note For FCG - CCGmohanjatinderNo ratings yet
- Hydraulics - Lecture 4 - BuoyancyDocument18 pagesHydraulics - Lecture 4 - Buoyancymeh mehNo ratings yet
- ch4 Harmonically Excited Vibrations of SDOFDocument14 pagesch4 Harmonically Excited Vibrations of SDOFMahmoud Abdelghafar ElhussienyNo ratings yet
- A 4 TH Order 7-Dimensional Polynomial WHDocument11 pagesA 4 TH Order 7-Dimensional Polynomial WHAkshaya Kumar RathNo ratings yet
- 02 - Derivation of Diffusivity Equation - Liquid CartesianDocument5 pages02 - Derivation of Diffusivity Equation - Liquid CartesianHassan AmerNo ratings yet
- Damped SHMDocument13 pagesDamped SHMM TahirNo ratings yet
- Maximum Likelihood Estimation (MLE) : Type Equation Here.000Document15 pagesMaximum Likelihood Estimation (MLE) : Type Equation Here.000Shivan BiradarNo ratings yet
- Flexibility 1 HDocument27 pagesFlexibility 1 Hمختار ابراهيمNo ratings yet
- ME 223 / ME 252: Fluid Mechanics: Homework Assignment 1Document4 pagesME 223 / ME 252: Fluid Mechanics: Homework Assignment 1DAVID MOKEPWESINo ratings yet
- Stochastic Assigment - PDF 2Document11 pagesStochastic Assigment - PDF 2Eyasu Kanbato OtoroNo ratings yet
- 5-Impedance of The String-02-03-2023Document6 pages5-Impedance of The String-02-03-2023efewfwedawasNo ratings yet
- WameedMUCLecture 2021 92118649Document17 pagesWameedMUCLecture 2021 92118649Jacob LardizabalNo ratings yet
- Lesson 6Document19 pagesLesson 6Octav PaloaieNo ratings yet
- Buckling of FramesDocument48 pagesBuckling of FramesJithin KannanNo ratings yet
- SM Notes (Unit 1,2,3,4 & 5)Document62 pagesSM Notes (Unit 1,2,3,4 & 5)culvertsNo ratings yet
- Assignment 1 (Problem Solving)Document7 pagesAssignment 1 (Problem Solving)Mostafa Ahmed ZeinNo ratings yet
- Electromagnetic Wave Propagation: Chapter-10ADocument50 pagesElectromagnetic Wave Propagation: Chapter-10AElizabeth zachariasNo ratings yet
- Online Class 1 23.01.22Document17 pagesOnline Class 1 23.01.22Abdul QuddusNo ratings yet
- Mechanics of Materials: Stress AnalysisDocument23 pagesMechanics of Materials: Stress Analysisshashikant kumarNo ratings yet
- Publication 11 13792 562Document6 pagesPublication 11 13792 562srinivasanNo ratings yet
- DR - Hannan Saadeh Solved Problems PDFDocument50 pagesDR - Hannan Saadeh Solved Problems PDFAbdNo ratings yet
- Some Tips For The Revised CSIR UGC NET For Physical SciencesDocument15 pagesSome Tips For The Revised CSIR UGC NET For Physical SciencesJijo P. Ulahannan100% (12)
- Oscillatory Motion Learning Objectives:: Teaching StrategiesDocument3 pagesOscillatory Motion Learning Objectives:: Teaching Strategiesآية حافظNo ratings yet
- Q2 Ion: Innovation With IntegrityDocument2 pagesQ2 Ion: Innovation With IntegrityWoodrow FoxNo ratings yet
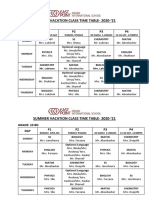
- Summer Vacation Class Time TableDocument3 pagesSummer Vacation Class Time TableAsraar BudyeNo ratings yet
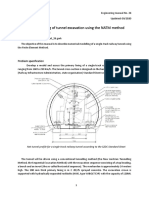
- Numerical Modelling of Tunnel Excavation Using The NATM MethodDocument38 pagesNumerical Modelling of Tunnel Excavation Using The NATM Methodgowtham reddyNo ratings yet
- International Roadmap For Artificial Gravity ReseaDocument7 pagesInternational Roadmap For Artificial Gravity ReseaManoel FylipeNo ratings yet
- MC - 17 Apr 2018Document46 pagesMC - 17 Apr 2018maizansofiaNo ratings yet
- Lec # 7 Storage SystemsDocument22 pagesLec # 7 Storage SystemsEman ShahidNo ratings yet
- General Structural Notes:: Typ. Det. For Beam or Slab Change Soffit Typ. Det. For Sleeves Thru RC BeamDocument1 pageGeneral Structural Notes:: Typ. Det. For Beam or Slab Change Soffit Typ. Det. For Sleeves Thru RC BeamJan Lawrence AlbertoNo ratings yet
- Ejercicios Cap - 11 - Cinética Angular HamillDocument3 pagesEjercicios Cap - 11 - Cinética Angular HamillLuisa MendozaNo ratings yet
- Ali Karimnezhad: Version September 30, 2015Document51 pagesAli Karimnezhad: Version September 30, 2015Jay-anne CruzNo ratings yet
- Discrete MathematicsDocument1 pageDiscrete MathematicsNathan Stuart The Retarded idiotNo ratings yet
- Esdd DrawingsDocument75 pagesEsdd DrawingsDivyam RajNo ratings yet
- UDo - Polymer Review - HW01Document3 pagesUDo - Polymer Review - HW01Elvira NgueliNo ratings yet
- Interference Using A Fresnel Biprism: 1 Introduction and TheoryDocument4 pagesInterference Using A Fresnel Biprism: 1 Introduction and TheoryMirza Khurram BaigNo ratings yet
- Discovery and InventionsDocument5 pagesDiscovery and InventionsSymon AngeloNo ratings yet
- Distillation Separation of Ethyl Acetate and WaterDocument4 pagesDistillation Separation of Ethyl Acetate and WaterAleja GarzoonNo ratings yet
- 1 PB PDFDocument17 pages1 PB PDFeka saputraNo ratings yet
- Physics WS 1Document4 pagesPhysics WS 1Anonymous SOQFPWBNo ratings yet
- JuncsDocument12 pagesJuncsblaktigerNo ratings yet
- Magnet Quiz 3Document2 pagesMagnet Quiz 3AYLEEN HAIDERNo ratings yet
- 3rd Periodical Test 2018 2019Document44 pages3rd Periodical Test 2018 2019rhocelNo ratings yet
- 5 Pile FoundationsDocument90 pages5 Pile FoundationsYIAN ZENGNo ratings yet
- Module 1Document12 pagesModule 1JamesBuensalidoDellavaNo ratings yet
- Magnetic Particle Inspection Report For Vehicles: Particles CleanerDocument1 pageMagnetic Particle Inspection Report For Vehicles: Particles Cleanerbalaji baluNo ratings yet
- 2x18 AWG 300V HFFR Shielded Instrumentation Cable - 8S81M01101 - V - 1 - R - 1Document2 pages2x18 AWG 300V HFFR Shielded Instrumentation Cable - 8S81M01101 - V - 1 - R - 1joseNo ratings yet