You might also like
- Key Words and PhrasesDocument12 pagesKey Words and PhrasesFatih BoyarNo ratings yet
- Chaotic Systems of Geodesics On Surfaces of Revolution 2017 - WestleyDocument37 pagesChaotic Systems of Geodesics On Surfaces of Revolution 2017 - Westleyleokuts1949No ratings yet
- 2007 Curvatures of Smooth and Discrete SurfacesDocument14 pages2007 Curvatures of Smooth and Discrete SurfacesMartinAlfonsNo ratings yet
- On Helices and Bertrand Curves in Euclidean 3-Space: Murat - Babaarslan@bozok - Edu.trDocument9 pagesOn Helices and Bertrand Curves in Euclidean 3-Space: Murat - Babaarslan@bozok - Edu.trAmarendra PattanayakNo ratings yet
- Strakes & Spiral Staircase - Differential GeometryDocument5 pagesStrakes & Spiral Staircase - Differential GeometryBoby ThomasNo ratings yet
- 10.1007@978 3 642 82838 615 PDFDocument15 pages10.1007@978 3 642 82838 615 PDFLeonardo Calheiros RodriguesNo ratings yet
- Berry Phase Patrick BrunoDocument33 pagesBerry Phase Patrick Brunodyegu1No ratings yet
- Surfaces Family With Common Smarandache Geodesic Curve According To Bishop Frame in Euclidean SpaceDocument11 pagesSurfaces Family With Common Smarandache Geodesic Curve According To Bishop Frame in Euclidean SpaceMia AmaliaNo ratings yet
- Alain Goriely and Michael Tabor - New Amplitude Equations For Thin Elastic RodsDocument4 pagesAlain Goriely and Michael Tabor - New Amplitude Equations For Thin Elastic RodsDopameNo ratings yet
- Geom NotesDocument10 pagesGeom NotesJ Luis MlsNo ratings yet
- Rohit MathsDocument59 pagesRohit MathsPiyush AroraNo ratings yet
- Journal of Mathematical Analysis and Applications: Ahmad T. Ali, Melih TurgutDocument11 pagesJournal of Mathematical Analysis and Applications: Ahmad T. Ali, Melih TurgutYoselin GomezNo ratings yet
- The Bending of Beams and The Second Moment of Area: Chris Bailey, Tim Bull and Aaron LawrenceDocument12 pagesThe Bending of Beams and The Second Moment of Area: Chris Bailey, Tim Bull and Aaron LawrenceNitin shepurNo ratings yet
- Rigid Foldable Structure From Space Curve Tachi IASS2011Document8 pagesRigid Foldable Structure From Space Curve Tachi IASS2011alan garcia reyesNo ratings yet
- Explicit Solutions For A Steady Vortex-Wave Interaction: Bydarreng - CrowdyDocument10 pagesExplicit Solutions For A Steady Vortex-Wave Interaction: Bydarreng - CrowdyelektronmuhNo ratings yet
- Smooth and Discrete Cone NetsDocument40 pagesSmooth and Discrete Cone NetsvishesharadaNo ratings yet
- Curvature Extrema and Four-Vertex Theorems ForDocument13 pagesCurvature Extrema and Four-Vertex Theorems ForAnsui ZakuNo ratings yet
- Levinson Elasticity Plates Paper - IsotropicDocument9 pagesLevinson Elasticity Plates Paper - IsotropicDeepaRavalNo ratings yet
- Timoshenko CoefficientDocument6 pagesTimoshenko CoefficientwarterflyNo ratings yet
- A Closed-Form Solution of A Bernoulli-Eulerbeam On A Viscoelastic Foundation Underharmonic Line LoadsDocument9 pagesA Closed-Form Solution of A Bernoulli-Eulerbeam On A Viscoelastic Foundation Underharmonic Line LoadsAniruddha BhaduriNo ratings yet
- BF 02015117Document11 pagesBF 02015117yasameenNo ratings yet
- Flexural M O T I O N of A Radially Rotating Beam Attached T O A Rigid BodyDocument10 pagesFlexural M O T I O N of A Radially Rotating Beam Attached T O A Rigid BodyAkshat RastogiNo ratings yet
- Scopus Sultanov 2019Document10 pagesScopus Sultanov 2019Agung Gde AgungNo ratings yet
- Surfaces With A Common Asymptotic Curve According PDFDocument11 pagesSurfaces With A Common Asymptotic Curve According PDFSammy NguyenNo ratings yet
- Vibration Frequencies For A Non-Uniform Beam With End MassDocument9 pagesVibration Frequencies For A Non-Uniform Beam With End MassThanyawut WansuwanNo ratings yet
- Lab Session 3Document7 pagesLab Session 3m.sheraz malikNo ratings yet
- FossenDocument21 pagesFossenEgwuatu UchennaNo ratings yet
- S. Neukirch, G.H.M. Van Der Heijden and J.M.T. Thompson - Writhing Instabilities of Twisted Rods: From Infinite To Finite LengthDocument17 pagesS. Neukirch, G.H.M. Van Der Heijden and J.M.T. Thompson - Writhing Instabilities of Twisted Rods: From Infinite To Finite LengthLokosooNo ratings yet
- Experiment # 1 PDFDocument15 pagesExperiment # 1 PDFMuhammad ALI NoorNo ratings yet
- Radius of Curvature of Cartesian ND Polar CurvesDocument14 pagesRadius of Curvature of Cartesian ND Polar Curveskaran338100% (2)
- Comparison Between Upwind and Multidimensional Upwind SchemesDocument11 pagesComparison Between Upwind and Multidimensional Upwind SchemesAnita AndrianiNo ratings yet
- Lab Session 2 MomDocument7 pagesLab Session 2 Momm.sheraz malikNo ratings yet
- Section 04 Elastic PropertiesDocument7 pagesSection 04 Elastic PropertiesMarwa WaleedNo ratings yet
- Surfaces With Curvature-CayleyDocument29 pagesSurfaces With Curvature-CayleySrinivasaNo ratings yet
- Yao-Xiong Huang: of ofDocument7 pagesYao-Xiong Huang: of ofAnubhav LalNo ratings yet
- Gao 2013Document20 pagesGao 2013Tiannan DengNo ratings yet
- Curvature of Ellipsoids and Other Surfaces: W. F. HarrisDocument5 pagesCurvature of Ellipsoids and Other Surfaces: W. F. HarrisypatelsNo ratings yet
- Bom Material - Sup - Regradas - Estricção PDFDocument21 pagesBom Material - Sup - Regradas - Estricção PDFIgor Chagas SantosNo ratings yet
- Received 4 May 1957: ABSTRACT. Within The Limitations of The Small-Deflexion Plate Theory, Complex VariableDocument23 pagesReceived 4 May 1957: ABSTRACT. Within The Limitations of The Small-Deflexion Plate Theory, Complex VariableyasameenNo ratings yet
- Alain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsDocument20 pagesAlain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsDopameNo ratings yet
- On Polar Relative Normalizations of Ruled SurfacesDocument10 pagesOn Polar Relative Normalizations of Ruled SurfacesvigneshNo ratings yet
- 1.1 Objective: Lab Session - 1Document18 pages1.1 Objective: Lab Session - 1fawad naeemNo ratings yet
- Paper 2Document16 pagesPaper 2Samah MohamedNo ratings yet
- Geometry of Middle SurfaceDocument29 pagesGeometry of Middle SurfaceParth ShahNo ratings yet
- Topic 1: Conic Sections Subtopic: 1.1 Introduction To Conic Sections 1.2 Circles Learning OutcomesDocument35 pagesTopic 1: Conic Sections Subtopic: 1.1 Introduction To Conic Sections 1.2 Circles Learning OutcomesAravind Ravi100% (1)
- Vibration of Non-Uniform Rods An - TuyenDocument14 pagesVibration of Non-Uniform Rods An - TuyenNguyen Danh TuyenNo ratings yet
- Gyroscope EquationsDocument9 pagesGyroscope EquationsJohn SchutkekerNo ratings yet
- 1960-Force and Moment Coefficients For Vibrating Aerofoils in CascadeDocument40 pages1960-Force and Moment Coefficients For Vibrating Aerofoils in Cascadesh1999No ratings yet
- 01ParticleProblems PDFDocument10 pages01ParticleProblems PDFBarbaraNo ratings yet
- Electromagnetic Field TheoryDocument73 pagesElectromagnetic Field Theoryajas777BNo ratings yet
- Free VibrationDocument25 pagesFree VibrationXiaomin XuNo ratings yet
- Cylindrically Orthotropic Circular Plates With Large Deflections 1)Document11 pagesCylindrically Orthotropic Circular Plates With Large Deflections 1)yasameenNo ratings yet
- Spinor Darboux Equations of Curves in Euclidean 3-SpaceDocument7 pagesSpinor Darboux Equations of Curves in Euclidean 3-SpaceDon HassNo ratings yet
- Study of Warping Torsion of Thin-Walled Beams With Open Cross-Section Using Macro-ElementsDocument16 pagesStudy of Warping Torsion of Thin-Walled Beams With Open Cross-Section Using Macro-ElementsnevinkoshyNo ratings yet
- Tables of Normalized Associated Legendre Polynomials: Mathematical Tables SeriesFrom EverandTables of Normalized Associated Legendre Polynomials: Mathematical Tables SeriesNo ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- Computation of Shortest Paths On Free-Form Parametric SurfacesDocument18 pagesComputation of Shortest Paths On Free-Form Parametric Surfacesritviz doshiNo ratings yet
- Hoa 1979Document13 pagesHoa 1979Ciprian ComanNo ratings yet
- Forum: The Vector Function For Distance Travelled in Great Circle NavigationDocument13 pagesForum: The Vector Function For Distance Travelled in Great Circle NavigationVasuNo ratings yet
- Mathematics Subject Classification Key Words and Phrases.: G G Ns G G G Ns GDocument32 pagesMathematics Subject Classification Key Words and Phrases.: G G Ns G G G Ns GMarcyNo ratings yet
- 2203 01997Document11 pages2203 01997MarcyNo ratings yet
- Likelihood Ratio Tests Under Model Misspecification in High DimensionsDocument24 pagesLikelihood Ratio Tests Under Model Misspecification in High DimensionsMarcyNo ratings yet
- 2203 03968Document20 pages2203 03968MarcyNo ratings yet
- Key Words and Phrases. Elephant Random Walk Martingales Strong Law of Large NumbersDocument27 pagesKey Words and Phrases. Elephant Random Walk Martingales Strong Law of Large NumbersMarcyNo ratings yet
- Introduction 1.1. Sphere Packings. For NDocument18 pagesIntroduction 1.1. Sphere Packings. For NMarcyNo ratings yet
- 2202 05247Document65 pages2202 05247MarcyNo ratings yet
- Quantum Limits On Product Manifolds: 1 Introduction and Main ResultsDocument24 pagesQuantum Limits On Product Manifolds: 1 Introduction and Main ResultsMarcyNo ratings yet
- Finite Groups in Which Every Self-Centralizing Subgroup Is A TI-subgroup or Subnormal or Has P - OrderDocument9 pagesFinite Groups in Which Every Self-Centralizing Subgroup Is A TI-subgroup or Subnormal or Has P - OrderMarcyNo ratings yet
- 2202 02768Document23 pages2202 02768MarcyNo ratings yet
- Quantum Limits On Product Manifolds: 1 Introduction and Main ResultsDocument24 pagesQuantum Limits On Product Manifolds: 1 Introduction and Main ResultsMarcyNo ratings yet
- Two Non-Congruent Regular Polygons Having Vertices at The Same Distances From The PointDocument9 pagesTwo Non-Congruent Regular Polygons Having Vertices at The Same Distances From The PointMarcyNo ratings yet
- Quantum Limits On Product Manifolds: 1 Introduction and Main ResultsDocument24 pagesQuantum Limits On Product Manifolds: 1 Introduction and Main ResultsMarcyNo ratings yet
- Quantum Limits On Product Manifolds: 1 Introduction and Main ResultsDocument24 pagesQuantum Limits On Product Manifolds: 1 Introduction and Main ResultsMarcyNo ratings yet
- The Abc-Theorem, Davenport's Inequality and Elliptic SurfacesDocument6 pagesThe Abc-Theorem, Davenport's Inequality and Elliptic SurfacesMarcyNo ratings yet
- Maarten Solleveld: × G G G GG NDocument36 pagesMaarten Solleveld: × G G G GG NMarcyNo ratings yet
- Inverses of R-Primitive K-Normal Elements Over Finite FieldsDocument30 pagesInverses of R-Primitive K-Normal Elements Over Finite FieldsMarcyNo ratings yet
- Q Q 1 F /F Q: Q Q Q Q 1Document4 pagesQ Q 1 F /F Q: Q Q Q Q 1MarcyNo ratings yet
- Proof of A Conjecture On Polynomials Preserving Nonnegative MatricesDocument5 pagesProof of A Conjecture On Polynomials Preserving Nonnegative MatricesMarcyNo ratings yet
- A I 0 I A: Date Key Words and PhrasesDocument17 pagesA I 0 I A: Date Key Words and PhrasesMarcyNo ratings yet
- The Abc-Theorem, Davenport's Inequality and Elliptic SurfacesDocument6 pagesThe Abc-Theorem, Davenport's Inequality and Elliptic SurfacesTrịnh KiệtNo ratings yet
- 2201 07346Document6 pages2201 07346MarcyNo ratings yet
- A I 0 I A: Date Key Words and PhrasesDocument17 pagesA I 0 I A: Date Key Words and PhrasesMarcyNo ratings yet
- Proof of A Conjecture On Polynomials Preserving Nonnegative MatricesDocument5 pagesProof of A Conjecture On Polynomials Preserving Nonnegative MatricesMarcyNo ratings yet
- A New Theorem Relating The Tangent Secant Theorem To The Golden RatioDocument7 pagesA New Theorem Relating The Tangent Secant Theorem To The Golden RatioMarcyNo ratings yet
- Action of W Onv For Orthogonal and Exceptional GroupsDocument8 pagesAction of W Onv For Orthogonal and Exceptional GroupsMarcyNo ratings yet
- Causal-Net Category: Xuexing LuDocument15 pagesCausal-Net Category: Xuexing LuMarcyNo ratings yet
- 2201 09401Document12 pages2201 09401MarcyNo ratings yet
- Causal-Net Category: Xuexing LuDocument15 pagesCausal-Net Category: Xuexing LuMarcyNo ratings yet
- Secondary GeographyDocument127 pagesSecondary GeographyAbcdNo ratings yet
- Of Personality Traits of Only and Sibling School Children in BeijingDocument14 pagesOf Personality Traits of Only and Sibling School Children in BeijingMuhammad Hamza AsgharNo ratings yet
- Thursday / January 2019 Thursday / January 2019Document572 pagesThursday / January 2019 Thursday / January 2019Zie EikinNo ratings yet
- Viva 15jun2008Document347 pagesViva 15jun2008garth.whitakerNo ratings yet
- Week 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumDocument79 pagesWeek 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumAmir MustakimNo ratings yet
- 2021 3 AbstractsDocument168 pages2021 3 AbstractsLong An ĐỗNo ratings yet
- Wish Upon A STAR: Presented By: Daulo, Eunice R. III - Block 3Document17 pagesWish Upon A STAR: Presented By: Daulo, Eunice R. III - Block 3nhyce18No ratings yet
- Beamforming For 4.9G/5G Networks: Exploiting Massive MIMO and Active Antenna TechnologiesDocument12 pagesBeamforming For 4.9G/5G Networks: Exploiting Massive MIMO and Active Antenna TechnologiesAymen Ben zinebNo ratings yet
- Strategic Cost AnalysisDocument24 pagesStrategic Cost AnalysisBusiness Expert Press100% (10)
- Assignment 4Document2 pagesAssignment 4Komal SinghNo ratings yet
- 2022 Cement Lime Manufacturing Ehs Guidelines enDocument39 pages2022 Cement Lime Manufacturing Ehs Guidelines enSamiNo ratings yet
- CHAPTER 2 - ALGEBRA (Latest)Document41 pagesCHAPTER 2 - ALGEBRA (Latest)FirdausNo ratings yet
- Si2304 (Mosfet Sot 23)Document6 pagesSi2304 (Mosfet Sot 23)Alfredo Valencia RodriguezNo ratings yet
- Exposure: The PhotoreactionDocument16 pagesExposure: The PhotoreactionGeetha ThiruvengadamNo ratings yet
- Centralized PurchasingDocument2 pagesCentralized PurchasingbiyyamobulreddyNo ratings yet
- Alderamin On The Sky - Volume 7Document311 pagesAlderamin On The Sky - Volume 7Pedro SilvaNo ratings yet
- FDocument102 pagesFTop channelNo ratings yet
- P&G Interview QuestionsDocument2 pagesP&G Interview Questionssupu100% (3)
- Union Metal SemiconductorDocument4 pagesUnion Metal SemiconductorskinhugoNo ratings yet
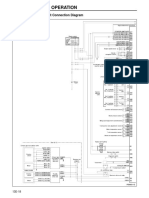
- Structure and Operation: 3. Electronic Control Unit Connection DiagramDocument16 pagesStructure and Operation: 3. Electronic Control Unit Connection DiagramAung Hlaing Min MyanmarNo ratings yet
- One Wavelength To Loop SkywireDocument2 pagesOne Wavelength To Loop SkywireRobert TurnerNo ratings yet
- Chapter 6 SBLDocument4 pagesChapter 6 SBLbrave manNo ratings yet
- The Extension Delivery SystemDocument10 pagesThe Extension Delivery SystemApril Jay Abacial IINo ratings yet
- Vitalis 2000Document26 pagesVitalis 2000ARLNo ratings yet
- AIMMS Modeling Guide - Linear Programming TricksDocument16 pagesAIMMS Modeling Guide - Linear Programming TricksgjorhugullNo ratings yet
- UntitledDocument37 pagesUntitledUnknown UserNo ratings yet
- Contractor Hse Management ProgramDocument12 pagesContractor Hse Management ProgramAhmed IbrahimNo ratings yet
- Can Snails Become Habituated To A StimulusDocument2 pagesCan Snails Become Habituated To A StimulusSachitra Wijethunga100% (1)
- FMS 427 BusinessPolicy1Document279 pagesFMS 427 BusinessPolicy1Adeniyi Adedolapo OLanrewajuNo ratings yet
- Barriers of CommunicationDocument5 pagesBarriers of CommunicationIVY YBAÑEZNo ratings yet