You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 3 Phase Grid Connected PV Inverter PSIMDocument15 pages3 Phase Grid Connected PV Inverter PSIMshrikrisNo ratings yet
- CISPR15 2013 StandardDocument50 pagesCISPR15 2013 StandardshrikrisNo ratings yet
- Dynamic Analysis and Control Design of A Single-Phase UPS InverterDocument12 pagesDynamic Analysis and Control Design of A Single-Phase UPS InvertershrikrisNo ratings yet
- DSP-controlled Photovoltaic Inverter For Universal Application in Research and EducationDocument7 pagesDSP-controlled Photovoltaic Inverter For Universal Application in Research and EducationshrikrisNo ratings yet
- Light Load THD and Efficiency Optimization of Digitally Controlled PFC Converter With Integrated Valley Switching ControlDocument15 pagesLight Load THD and Efficiency Optimization of Digitally Controlled PFC Converter With Integrated Valley Switching ControlshrikrisNo ratings yet
- Control For Grid-Connected and Stand-Alone Operations of Three-Phase Grid-Connected InverterDocument5 pagesControl For Grid-Connected and Stand-Alone Operations of Three-Phase Grid-Connected InvertershrikrisNo ratings yet
- Simplified High-Accuracy Calculation of Eddy-Current Losses in Round-Wire WindingsDocument8 pagesSimplified High-Accuracy Calculation of Eddy-Current Losses in Round-Wire WindingsshrikrisNo ratings yet
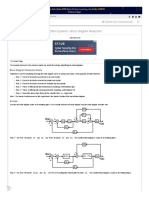
- Control Systems Block Diagram Reduction Www-TutorialspointDocument2 pagesControl Systems Block Diagram Reduction Www-TutorialspointshrikrisNo ratings yet
- Stray-Current Losses in Stranded Windings of Transformers Bu KaulDocument10 pagesStray-Current Losses in Stranded Windings of Transformers Bu KaulshrikrisNo ratings yet
- A Very Accurate Measurement System For Multielectrode Capacitive Sensors - Excellent - PaperDocument5 pagesA Very Accurate Measurement System For Multielectrode Capacitive Sensors - Excellent - PapershrikrisNo ratings yet
- Control Systems Block Diagram Reduction and Mason's Formula Www-TutorialspointDocument8 pagesControl Systems Block Diagram Reduction and Mason's Formula Www-TutorialspointshrikrisNo ratings yet
- Input Impedance Measurements For Stable Input Filter Design by OMICRONDocument22 pagesInput Impedance Measurements For Stable Input Filter Design by OMICRONshrikrisNo ratings yet
- The Skin Effect - Philips Technical Review Volume28Document16 pagesThe Skin Effect - Philips Technical Review Volume28shrikrisNo ratings yet
- Control Systems Control Systems Masons Gain Formula-Www-Tutorialspoint-ComDocument6 pagesControl Systems Control Systems Masons Gain Formula-Www-Tutorialspoint-ComshrikrisNo ratings yet
- Input Filter Interactions With Switching by BassoDocument166 pagesInput Filter Interactions With Switching by BassoshrikrisNo ratings yet
- Input Filter Design by EricksonDocument49 pagesInput Filter Design by EricksonshrikrisNo ratings yet
- Design of PID ControllerDocument13 pagesDesign of PID ControllershrikrisNo ratings yet
- A Low-Cost Highly Stable Reference Capacitor For Capacitive Sensor SystemsDocument5 pagesA Low-Cost Highly Stable Reference Capacitor For Capacitive Sensor SystemsshrikrisNo ratings yet
- Input Filter Design Example Biricha Digital Power LTDDocument5 pagesInput Filter Design Example Biricha Digital Power LTDshrikrisNo ratings yet
- EMI Filter Design For An Isolated DC-DC Boost ConverterDocument25 pagesEMI Filter Design For An Isolated DC-DC Boost ConvertershrikrisNo ratings yet
- EROR AMPLIFIER AND COMPENSATION NETWORK DESIGN Slup069Document4 pagesEROR AMPLIFIER AND COMPENSATION NETWORK DESIGN Slup069shrikris0% (1)
- Input Filter Compensation For Switching Regulators by S S KelkarDocument371 pagesInput Filter Compensation For Switching Regulators by S S KelkarshrikrisNo ratings yet
- Internal Compensation - Boon or Bane Slup174Document14 pagesInternal Compensation - Boon or Bane Slup174shrikrisNo ratings yet
- A Practical Method For Separating Common-Mode and Differential-Mode Emissions in Conducted Emissions Testing by Analog DrevicesDocument4 pagesA Practical Method For Separating Common-Mode and Differential-Mode Emissions in Conducted Emissions Testing by Analog DrevicesshrikrisNo ratings yet
- Frequency Response Measurements For Switching Power Supplies Slup121Document13 pagesFrequency Response Measurements For Switching Power Supplies Slup121shrikrisNo ratings yet
- 5 KW Two-Channel Interleaved CCM PFC EVAL Board InfineonDocument41 pages5 KW Two-Channel Interleaved CCM PFC EVAL Board InfineonshrikrisNo ratings yet
- Performance Comparison of Ferrite and Nanocrystalline Cores For Medium-Frequency Transformer of DC-DC ConverterDocument21 pagesPerformance Comparison of Ferrite and Nanocrystalline Cores For Medium-Frequency Transformer of DC-DC ConvertershrikrisNo ratings yet