You might also like
- TC74 DatasheetDocument18 pagesTC74 Datasheetgeorge elio elmerNo ratings yet
- Tiny Serial Digital Thermal Sensor: Features General DescriptionDocument16 pagesTiny Serial Digital Thermal Sensor: Features General DescriptionLucy TranNo ratings yet
- Datasheet 4029Document8 pagesDatasheet 4029Sarah RechNo ratings yet
- Max31856 2Document30 pagesMax31856 2Natália Borges MarcelinoNo ratings yet
- CD4023BC Buffered Triple 3-Input NAND Gate: General Description FeaturesDocument6 pagesCD4023BC Buffered Triple 3-Input NAND Gate: General Description FeaturesSantiago SerranoNo ratings yet
- Max31856 PDFDocument30 pagesMax31856 PDFDiego Fernando ArpiNo ratings yet
- Preliminary: CD-R Encoder/Decoder LSI With Built-In ATAPI (IDE) InterfaceDocument7 pagesPreliminary: CD-R Encoder/Decoder LSI With Built-In ATAPI (IDE) InterfacecasaswqNo ratings yet
- CD4024BC 7-Stage Ripple Carry Binary Counter: General Description FeaturesDocument6 pagesCD4024BC 7-Stage Ripple Carry Binary Counter: General Description FeaturesGoodLookingPirateNo ratings yet
- IC ON LINE - CN - sc91215 A - 4817534Document16 pagesIC ON LINE - CN - sc91215 A - 4817534Kael The InvokerNo ratings yet
- Xinglight XL 2020RGBC WS2812B - C5349955Document20 pagesXinglight XL 2020RGBC WS2812B - C5349955Irza Aditya MahendraNo ratings yet
- Thermal Sensor With SPI Interfa: Features DescriptionDocument22 pagesThermal Sensor With SPI Interfa: Features DescriptioncatalinbujdeiNo ratings yet
- CD40106BC Hex Schmitt Trigger: General Description FeaturesDocument6 pagesCD40106BC Hex Schmitt Trigger: General Description FeaturesWellison RodriguesNo ratings yet
- CD4029BC Presettable Binary/Decade Up/Down Counter: General Description FeaturesDocument9 pagesCD4029BC Presettable Binary/Decade Up/Down Counter: General Description FeaturesSantiago SerranoNo ratings yet
- Temperatur SensorDocument30 pagesTemperatur Sensorzohreh.safarpour1No ratings yet
- DS1621 Digital Thermometer and Thermostat Technical ReferenceDocument16 pagesDS1621 Digital Thermometer and Thermostat Technical ReferenceAnisur RahmanNo ratings yet
- RXL104067-B DatasheetDocument23 pagesRXL104067-B DatasheetChetan DadhaniyaNo ratings yet
- CD40106BC Hex Schmitt Trigger: General Description FeaturesDocument6 pagesCD40106BC Hex Schmitt Trigger: General Description FeaturesHABUMUGISHA DieudonneNo ratings yet
- Pixel Ws2814 RGBW Ic Specification Datasheet From Hanron LightingDocument6 pagesPixel Ws2814 RGBW Ic Specification Datasheet From Hanron LightingHanron LightingNo ratings yet
- CD4019BC Quad AND-OR Select Gate: General Description FeaturesDocument6 pagesCD4019BC Quad AND-OR Select Gate: General Description FeaturesGoodLookingPirateNo ratings yet
- DS1624 Digital Thermometer and Memory: Features Pin AssignmentDocument16 pagesDS1624 Digital Thermometer and Memory: Features Pin AssignmentJhónatan JuárezNo ratings yet
- CD4069 DatasheetDocument7 pagesCD4069 DatasheetАна СтојковиќNo ratings yet
- Signal Line 256 Gray Level 3 Channel Constant Current LED Driver ICDocument8 pagesSignal Line 256 Gray Level 3 Channel Constant Current LED Driver ICJhon UmanaNo ratings yet
- Color sensor outputs digital RGB light dataDocument11 pagesColor sensor outputs digital RGB light datagabiNo ratings yet
- WS2812B-Mini-V2 Intelligent LED Integrates Control and RGBDocument7 pagesWS2812B-Mini-V2 Intelligent LED Integrates Control and RGBDavidMoscosoNo ratings yet
- Infrared Car Key Transmitter ComponentDocument4 pagesInfrared Car Key Transmitter Componentlepicane7No ratings yet
- Data Del Sensor PDFDocument15 pagesData Del Sensor PDFAlberto Jah Love LeyvaNo ratings yet
- 1/4-Duty General-Purpose LCD Display Driver: Cmos IcDocument18 pages1/4-Duty General-Purpose LCD Display Driver: Cmos IcBacem AlaouiNo ratings yet
- WS2812C 2020Document9 pagesWS2812C 2020sales6No ratings yet
- 33/4 DIGITS LCD DISPLAY, 3260-COUNT A/D FOR DMMDocument17 pages33/4 DIGITS LCD DISPLAY, 3260-COUNT A/D FOR DMMDyogo MondegoNo ratings yet
- TS19503CB10H: Taiwan SemiconductorDocument13 pagesTS19503CB10H: Taiwan Semiconductorn tanevarNo ratings yet
- WS2812B WorldsemiDocument9 pagesWS2812B WorldsemiIrza Aditya MahendraNo ratings yet
- Low-Power, 12-Bit Voltage-Output DAC With Serial Interface: - General Description FeaturesDocument12 pagesLow-Power, 12-Bit Voltage-Output DAC With Serial Interface: - General Description FeaturesTheo SouzaNo ratings yet
- DS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin AssignmentDocument27 pagesDS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin AssignmentaraikNo ratings yet
- DS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin AssignmentDocument27 pagesDS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin AssignmentaraikNo ratings yet
- HDM3224L-G: Dimensional Drawing 320 X240 Monochrome Graphics, White LED BacklightDocument1 pageHDM3224L-G: Dimensional Drawing 320 X240 Monochrome Graphics, White LED BacklightVallerynNo ratings yet
- WS2813 MiniDocument8 pagesWS2813 MiniDrago MirNo ratings yet
- SLA7070MR 2-Phase Stepper Motor Driver IC DatasheetDocument2 pagesSLA7070MR 2-Phase Stepper Motor Driver IC DatasheetDriss Ben MohamedNo ratings yet
- CD4069UBC Inverter Circuits: General Description FeaturesDocument7 pagesCD4069UBC Inverter Circuits: General Description FeaturesvaleriojesusNo ratings yet
- LCD Module Specification: Model: LG128642-BMDWH6VDocument20 pagesLCD Module Specification: Model: LG128642-BMDWH6VStuxnetNo ratings yet
- WS2812B-2020 V10 en 181106150240761Document9 pagesWS2812B-2020 V10 en 181106150240761Irza Aditya MahendraNo ratings yet
- Sanyo LC78211Document6 pagesSanyo LC78211gahareNo ratings yet
- Stepper Motor Driver ICs Unipolar 1-2-1 2-Phase Support Built-in SequencerDocument2 pagesStepper Motor Driver ICs Unipolar 1-2-1 2-Phase Support Built-in SequencerDriss Ben MohamedNo ratings yet
- Intelligent Control LED Integrated Light Source: Features and BenefitsDocument9 pagesIntelligent Control LED Integrated Light Source: Features and BenefitsWolf StarkNo ratings yet
- Htcsemi-Ht1621brqz C2886391-1Document14 pagesHtcsemi-Ht1621brqz C2886391-1Asantha Buddhi HerathNo ratings yet
- AGM 24064A-801 LCD Module SpecificationDocument24 pagesAGM 24064A-801 LCD Module SpecificationrogeriocorreaNo ratings yet
- Signal Line 256 Gray Level 3 Channel Constant Current LED Driver ICDocument8 pagesSignal Line 256 Gray Level 3 Channel Constant Current LED Driver ICsteven MelgarejoNo ratings yet
- S1d15200doa or EquivalentDocument10 pagesS1d15200doa or EquivalentArduinoBeto RojasNo ratings yet
- 8-Bit, 250 Msps Adc With Demuxed Outputs Technical Data: Applications FeaturesDocument11 pages8-Bit, 250 Msps Adc With Demuxed Outputs Technical Data: Applications FeaturesnudufoqiNo ratings yet
- Pam 2863Document11 pagesPam 2863Nguyen HoangNo ratings yet
- DS18B20 Programmable Resolution 1-Wire Digital Thermometer: General Description Benefits and FeaturesDocument22 pagesDS18B20 Programmable Resolution 1-Wire Digital Thermometer: General Description Benefits and FeaturesKill MasterNo ratings yet
- Az Displays, Inc.: Acm1602A Series LCD ModuleDocument5 pagesAz Displays, Inc.: Acm1602A Series LCD ModuleNAIR KRISHNA RAVEENDRANNo ratings yet
- MS5837-02BA: Gel-Filled, Ultra-Compact, Water Resistant Digital Pressure and Temperature SensorDocument17 pagesMS5837-02BA: Gel-Filled, Ultra-Compact, Water Resistant Digital Pressure and Temperature SensorIdehen KelvinNo ratings yet
- 06.04.202 - MAXI MW 8 30 - enDocument4 pages06.04.202 - MAXI MW 8 30 - enAgus PrasetioNo ratings yet
- LTC2992Document46 pagesLTC2992mar_barudjNo ratings yet
- c11204-01 Kacc1203eDocument6 pagesc11204-01 Kacc1203eAlladinNo ratings yet
- Honeywell HMC6352 Compass Module (#29323) : FeaturesDocument4 pagesHoneywell HMC6352 Compass Module (#29323) : FeaturesjinudollyNo ratings yet
- Sk6812 Mini 3535 Led DatasheetDocument12 pagesSk6812 Mini 3535 Led DatasheetDaisyNo ratings yet
- Snag No Snag Description Amount Unit Material Will Be Done by PriceDocument1 pageSnag No Snag Description Amount Unit Material Will Be Done by PriceKamran ManafzadeNo ratings yet
- Manual MICROSPEED PLUS ENG 2 Files MergedDocument96 pagesManual MICROSPEED PLUS ENG 2 Files MergedAlexandr MatyuninNo ratings yet
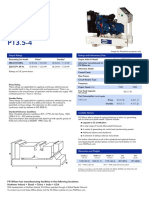
- G.G. p13.5Document4 pagesG.G. p13.5Gustavo Acuña SolizNo ratings yet
- UserManual LCCAST600T en v2Document13 pagesUserManual LCCAST600T en v2Kamran ManafzadeNo ratings yet
- UserManual LCCAST600 en v5Document17 pagesUserManual LCCAST600 en v5Kamran ManafzadeNo ratings yet
- Obstetrics 4 1087Document7 pagesObstetrics 4 1087Kamran ManafzadeNo ratings yet
- 傣纬螺杆机英文操作手册2015 6 26Document88 pages傣纬螺杆机英文操作手册2015 6 26Tony MarascaNo ratings yet
- TS Gradient Amplifier Copley 781-787Document272 pagesTS Gradient Amplifier Copley 781-787СергейNo ratings yet
- G.G. p13.5Document4 pagesG.G. p13.5Gustavo Acuña SolizNo ratings yet
- Ir 2113Document18 pagesIr 2113rohitsingh2909No ratings yet
- SP483 SP485Document13 pagesSP483 SP485Danijel AspanNo ratings yet
- Vaisala Iso45001 Certificate Eng 2020Document2 pagesVaisala Iso45001 Certificate Eng 2020Kamran ManafzadeNo ratings yet
- 201412914488399Document25 pages201412914488399Phạm Hoàng SơnNo ratings yet
- SINUMERIK 840di SL Manual: Valid ForDocument554 pagesSINUMERIK 840di SL Manual: Valid ForBoris ZhilkinNo ratings yet
- OCS Technical Manual - Scale Configuration, Calibration & Communication GuideDocument19 pagesOCS Technical Manual - Scale Configuration, Calibration & Communication GuideKamran ManafzadeNo ratings yet
- Weather Transmitter WXT530 Series: FlexibilityDocument2 pagesWeather Transmitter WXT530 Series: Flexibilitycyz707No ratings yet
- Vaisala Iso9001 Certificate Eng 2020Document2 pagesVaisala Iso9001 Certificate Eng 2020Kamran ManafzadeNo ratings yet
- Features: GE Logiq 500/500 Pro UltrasoundDocument2 pagesFeatures: GE Logiq 500/500 Pro UltrasoundKamran ManafzadeNo ratings yet
- A3 Series All PDFDocument320 pagesA3 Series All PDFHà Chính100% (1)
- Omron Frek - Regulator J7azDocument177 pagesOmron Frek - Regulator J7azvlado948No ratings yet
- Sinumerik 840D Configuring The NCU: System OverviewDocument98 pagesSinumerik 840D Configuring The NCU: System OverviewPaulNo ratings yet
- Scheda Tecnica Selezionatrice Ponderale HC MDocument6 pagesScheda Tecnica Selezionatrice Ponderale HC MKamran ManafzadeNo ratings yet
- Cm300du 12nfh eDocument6 pagesCm300du 12nfh eKamran ManafzadeNo ratings yet
- Model No.: R150Xje Suffix: L01: Product SpecificationDocument29 pagesModel No.: R150Xje Suffix: L01: Product SpecificationKamran ManafzadeNo ratings yet
- General Description Features: High-Current Low-Dropout RegulatorsDocument23 pagesGeneral Description Features: High-Current Low-Dropout RegulatorsKamran ManafzadeNo ratings yet
- Full Speed USB, 16 K ISP FLASH MCU Family: 10-Bit ADCDocument254 pagesFull Speed USB, 16 K ISP FLASH MCU Family: 10-Bit ADCKamran ManafzadeNo ratings yet
- Hiperfred: Low Loss and Soft Recovery High Performance Fast Recovery Diode Parallel LegsDocument6 pagesHiperfred: Low Loss and Soft Recovery High Performance Fast Recovery Diode Parallel LegsKamran ManafzadeNo ratings yet
- Erm2002-1 Series: EastrisingDocument20 pagesErm2002-1 Series: EastrisingKamran ManafzadeNo ratings yet
- Xilinx® Spartan® 6 Power Reference Design With TPS650250 Power Management ICDocument20 pagesXilinx® Spartan® 6 Power Reference Design With TPS650250 Power Management ICKamran ManafzadeNo ratings yet
- High Power Amplifier Product BrochureDocument8 pagesHigh Power Amplifier Product BrochureachievaNo ratings yet
- CD120 SpecificationsDocument8 pagesCD120 SpecificationsmechsrinuNo ratings yet
- 8.0 Inch IPS MIPI 800x1280 AML08021016-31DDocument13 pages8.0 Inch IPS MIPI 800x1280 AML08021016-31DcalvinkleinwuNo ratings yet
- R F (H W C) :: Operations & Screening CrushingDocument7 pagesR F (H W C) :: Operations & Screening Crushingkmohamedkeita906No ratings yet
- Dodge Avenger IAT Sensor DTC P0112 P0113 FixDocument7 pagesDodge Avenger IAT Sensor DTC P0112 P0113 Fixflash_24014910No ratings yet
- Estufa Rangers GEDocument56 pagesEstufa Rangers GEVictor Manuel Valdez del BosqueNo ratings yet
- 1593767037565-UFSBI and Its Applications Presentation - FINAL - S GHOSH - ECR - WEB PresentDocument87 pages1593767037565-UFSBI and Its Applications Presentation - FINAL - S GHOSH - ECR - WEB PresentNaresh KumarNo ratings yet
- Dr. Samer Alsadi Department of Electrical Engineering & Technology PTU-KadoorieDocument13 pagesDr. Samer Alsadi Department of Electrical Engineering & Technology PTU-Kadoorieحسين ابو حامد100% (1)
- Polycab Switches Catalogue 2020Document36 pagesPolycab Switches Catalogue 2020AnkanPattanayakNo ratings yet
- B&H Mechanical Connectors For Cable JointingDocument1 pageB&H Mechanical Connectors For Cable Jointinganujpkr5118No ratings yet
- Manual Uso Stanbay EnergyDocument2 pagesManual Uso Stanbay EnergyMarijoseNo ratings yet
- Parts Required For Overhaul Himsen H25-33Document4 pagesParts Required For Overhaul Himsen H25-33Rahul SawantNo ratings yet
- LCD-32M95HD Service ManualDocument50 pagesLCD-32M95HD Service ManualOrlando Jose Pascua71% (7)
- MCD 710Document35 pagesMCD 710CARLOS TEMPONo ratings yet
- AS-100 Tower Crane Safety System Installation ManualDocument67 pagesAS-100 Tower Crane Safety System Installation Manualbaraa alkhabbazNo ratings yet
- Merkur High Pressure Sprayer: Instructions-PartsDocument30 pagesMerkur High Pressure Sprayer: Instructions-PartsdcsamaraweeraNo ratings yet
- Lapp - Pro219enin Unitronic Liycy (TP)Document4 pagesLapp - Pro219enin Unitronic Liycy (TP)Rahul MohiteNo ratings yet
- Parameter Manual. Сервопривод (B-65270en)Document702 pagesParameter Manual. Сервопривод (B-65270en)Богинский Сергей100% (1)
- Lab Report - Electric MachinesDocument10 pagesLab Report - Electric MachinesLUQMAN AMMARNo ratings yet
- RavoDocument14 pagesRavoRemzi CerenNo ratings yet
- Music Hall Mmf2.1 Turntable ManualDocument13 pagesMusic Hall Mmf2.1 Turntable ManualtodwilliNo ratings yet
- CRN - 45 3 - A F G V HQQVDocument2 pagesCRN - 45 3 - A F G V HQQVWendyNo ratings yet
- Co&a Module 5 Part 1Document25 pagesCo&a Module 5 Part 1BOBAN05No ratings yet
- RCMDC 3300 PF 48Document2 pagesRCMDC 3300 PF 48208.nampa.idNo ratings yet
- SR ShipsDocument1 pageSR ShipsolegNo ratings yet
- Meta KMSGDocument53 pagesMeta KMSGMuhammad Husnain AbbasNo ratings yet
- Komatsu Cod 5 PDFDocument1,000 pagesKomatsu Cod 5 PDFHerlan GarciaNo ratings yet
- Systems & Components For The Bus and CoachDocument8 pagesSystems & Components For The Bus and CoachAlessandra NoeliaNo ratings yet
- Lptop Toshiba Schematic l100Document27 pagesLptop Toshiba Schematic l100Swati BaslaNo ratings yet
- SK60GAL123: Semitop 2Document5 pagesSK60GAL123: Semitop 2olegNo ratings yet
- Activity Notes BookDocument12 pagesActivity Notes Bookkaran singh class 11 aNo ratings yet