You might also like
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelNo ratings yet
- Applications of Laplace TransformsDocument11 pagesApplications of Laplace Transformswealthyjaneabletes12No ratings yet
- EE 351 Spring 2021 Homework 4 SolutionsDocument3 pagesEE 351 Spring 2021 Homework 4 SolutionsKalenNo ratings yet
- HW1 SolutionsDocument3 pagesHW1 SolutionsMuhammad AbubakerNo ratings yet
- EEET2197 Tute2 SolnDocument5 pagesEEET2197 Tute2 SolnCollin lcwNo ratings yet
- Solution Assignment 2Document7 pagesSolution Assignment 2sushant sharmaNo ratings yet
- Exam3 SolutionsDocument5 pagesExam3 SolutionsOrlando FernandezNo ratings yet
- Solution To HW9Document11 pagesSolution To HW9Andreina BallunoNo ratings yet
- ENGG 3410 Tutorial 1Document3 pagesENGG 3410 Tutorial 1aliNo ratings yet
- Week 4 SolutionDocument6 pagesWeek 4 SolutionRaja KumarNo ratings yet
- ELEN90055 Control Systems: Worksheet 3 - Solutions To Starred ProblemsDocument3 pagesELEN90055 Control Systems: Worksheet 3 - Solutions To Starred ProblemsMingyue WangNo ratings yet
- Midterm 16 SolutionDocument6 pagesMidterm 16 SolutionDio ChanNo ratings yet
- Solution Assignment 4Document9 pagesSolution Assignment 4sushant sharmaNo ratings yet
- Time: 13:00-15:00 Hrs. Open Book Marks: 100 Attempt All QuestionsDocument5 pagesTime: 13:00-15:00 Hrs. Open Book Marks: 100 Attempt All QuestionsJosé CarlosNo ratings yet
- Indian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Document2 pagesIndian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Black ReaperNo ratings yet
- 246 Sample ChapterDocument24 pages246 Sample ChapterAhmed SaidNo ratings yet
- EEET2197 Tute7 SolnDocument11 pagesEEET2197 Tute7 SolnCollin lcwNo ratings yet
- Differential EquationsDocument10 pagesDifferential EquationsPatricia PazNo ratings yet
- Mathematical Argument DraftDocument15 pagesMathematical Argument DraftBen Matthew Alferez CoNo ratings yet
- S2-Transformata LaplaceDocument6 pagesS2-Transformata LaplaceStefan CalinNo ratings yet
- EEET2197 Tute3 SolnDocument7 pagesEEET2197 Tute3 SolnCollin lcwNo ratings yet
- Department of Electronics and Communication Engineering Assignment No: 1 Module Name: Control Systems Module Code: ELEC 20005.2 Session: ADocument18 pagesDepartment of Electronics and Communication Engineering Assignment No: 1 Module Name: Control Systems Module Code: ELEC 20005.2 Session: AaneebaNo ratings yet
- Boyce ODEch 6 S 4 P 04Document3 pagesBoyce ODEch 6 S 4 P 04Feby ArdhaniNo ratings yet
- Solution Manual Process Dynamics and Control Donald R CoughanowrDocument135 pagesSolution Manual Process Dynamics and Control Donald R Coughanowrjesús Iván Santamaria najarNo ratings yet
- HW 6Document2 pagesHW 6foof faafNo ratings yet
- Maxinski Fakultet U Beogradu Katedra Za Automatsko UpravljanjeDocument8 pagesMaxinski Fakultet U Beogradu Katedra Za Automatsko Upravljanjebeni buzdovanNo ratings yet
- Lecture 2 - Mathematical Model - Transfer FunctionDocument10 pagesLecture 2 - Mathematical Model - Transfer FunctionSyamil TamlikhaNo ratings yet
- Mathematical Models of Physical SystemsDocument44 pagesMathematical Models of Physical Systemspersian_prideNo ratings yet
- ECE301, Homework#12 Solution: November 28, 2007Document5 pagesECE301, Homework#12 Solution: November 28, 2007AndréOliverNo ratings yet
- Laplace TransformationDocument8 pagesLaplace TransformationSeanne CruzNo ratings yet
- NPTEL Online Course: Control Engineering: Assignment 1Document4 pagesNPTEL Online Course: Control Engineering: Assignment 1udayNo ratings yet
- HwsDocument9 pagesHwshudha69No ratings yet
- Coughnowr IPC SumsDocument90 pagesCoughnowr IPC SumsNeel PatelNo ratings yet
- Deber 3Document1 pageDeber 3sebastian coelloNo ratings yet
- G(s) = k s (τs+1) G s) = τs+1) : = 5 ; M = 0.5 ln (0.5) + ln (0.5) = 0.215453762Document8 pagesG(s) = k s (τs+1) G s) = τs+1) : = 5 ; M = 0.5 ln (0.5) + ln (0.5) = 0.215453762Diana UlloaNo ratings yet
- Steady State ErrorsDocument33 pagesSteady State Errorsasma mushtaqNo ratings yet
- Tugas 4 Dasar Sistem Kendali Dibuat Oleh Habib 21Document3 pagesTugas 4 Dasar Sistem Kendali Dibuat Oleh Habib 21Habib ArrasyidNo ratings yet
- Control Systems Theory and Design: Problem 1Document4 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- Process Dynamics and Control 4th Class HW PDFDocument13 pagesProcess Dynamics and Control 4th Class HW PDFZaidoon MohsinNo ratings yet
- 446-07 Soln of DEs (N) - HandoutDocument8 pages446-07 Soln of DEs (N) - HandoutFrancisco HurtadoNo ratings yet
- Final End Sem Solution-2018Document9 pagesFinal End Sem Solution-2018Sriram MudunuriNo ratings yet
- Ejercicio Ejercicios 5ta ProcesoooDocument15 pagesEjercicio Ejercicios 5ta ProcesoooDavid Franco FariasNo ratings yet
- Examen eDocument2 pagesExamen eAlejandro CamachoNo ratings yet
- Week 2 Assignment PDFDocument4 pagesWeek 2 Assignment PDFGanesh RadharamNo ratings yet
- Laplace Transform Sample ProblemsDocument5 pagesLaplace Transform Sample ProblemsJoselito DaroyNo ratings yet
- Metodo Numerico InformeDocument2 pagesMetodo Numerico InformeRoger EscalanteNo ratings yet
- Activity 1: Week 10 - Laplace Transform Part 2 ActivitiesDocument11 pagesActivity 1: Week 10 - Laplace Transform Part 2 ActivitiessiarwafaNo ratings yet
- TC Slides Prat2 1 FCDocument19 pagesTC Slides Prat2 1 FCRodrigo GomesNo ratings yet
- Solution To Homework Assignment 4Document6 pagesSolution To Homework Assignment 4cavanzasNo ratings yet
- Examples On Laplace TransformDocument2 pagesExamples On Laplace TransformMehmet AKBABANo ratings yet
- Interconnection of LTI Systems: Transmittance. The Transmittance Relates The Incoming and Outgoing Signals As IndicatedDocument16 pagesInterconnection of LTI Systems: Transmittance. The Transmittance Relates The Incoming and Outgoing Signals As IndicatedJohn David Meer RamosNo ratings yet
- ECE311S: Dynamic Systems and Control Problem Set 2Document3 pagesECE311S: Dynamic Systems and Control Problem Set 2zoeeeNo ratings yet
- The Laplace TransformDocument22 pagesThe Laplace Transformindrayadi2009No ratings yet
- Laplace PDFDocument59 pagesLaplace PDFsygwapoooNo ratings yet
- Solution To Homework Assignment 1Document6 pagesSolution To Homework Assignment 1Trường Tùng LýNo ratings yet
- 18.04 Practice Problems Laplace Transform, Spring 2018 SolutionsDocument3 pages18.04 Practice Problems Laplace Transform, Spring 2018 SolutionsMelindaNo ratings yet
- Control ECM2105: Laplace Transform Examples: L (Sinh (At) ) A S A L (Cosh (At) ) - Hint: What IsDocument1 pageControl ECM2105: Laplace Transform Examples: L (Sinh (At) ) A S A L (Cosh (At) ) - Hint: What IsEduardo FerreiraNo ratings yet
- 1 Problems Laplace Transform: Problem 1Document6 pages1 Problems Laplace Transform: Problem 1KarNo ratings yet
- DC Power Supply With Touch Pad Interface and MicrocontrollerDocument3 pagesDC Power Supply With Touch Pad Interface and MicrocontrollerMaharshiGohelNo ratings yet
- EENG EGTE3288 Homework Set 7Document5 pagesEENG EGTE3288 Homework Set 7MaharshiGohelNo ratings yet
- MATLAB Programming Laboratory CPEG 201L Spring 2022 Project InstructionsDocument1 pageMATLAB Programming Laboratory CPEG 201L Spring 2022 Project InstructionsMaharshiGohelNo ratings yet
- Lab 2 - Embedded Programming and Interfacing Review PreparationDocument3 pagesLab 2 - Embedded Programming and Interfacing Review PreparationMaharshiGohelNo ratings yet
- QDocument7 pagesQMaharshiGohelNo ratings yet
- EENG EGTE3288 Lab 12 LBE RTI Based DisplayDocument4 pagesEENG EGTE3288 Lab 12 LBE RTI Based DisplayMaharshiGohelNo ratings yet
- University of Hartford - ECE DepartmentDocument10 pagesUniversity of Hartford - ECE DepartmentMaharshiGohelNo ratings yet
- Result - 11 - 12 - 2020, 01 - 40 - 47Document1 pageResult - 11 - 12 - 2020, 01 - 40 - 47MaharshiGohelNo ratings yet
- Lab # 1 Introduction To Circuits Name:Ali BoabbasDocument10 pagesLab # 1 Introduction To Circuits Name:Ali BoabbasMaharshiGohelNo ratings yet
- JA Meshal Alotaibi: Background of DSB-AMDocument4 pagesJA Meshal Alotaibi: Background of DSB-AMMaharshiGohelNo ratings yet
- Department of Engineering, College of Engineering and Applied Sciences, American University of Kuwait, P. O. Box 3323, Safat, 13034 KuwaitDocument1 pageDepartment of Engineering, College of Engineering and Applied Sciences, American University of Kuwait, P. O. Box 3323, Safat, 13034 KuwaitMaharshiGohelNo ratings yet
- Academic Year 2021/22: Analogue Analysis and Design (ENG530/P21402) Item 1 - CW1/Laboratory ExerciseDocument4 pagesAcademic Year 2021/22: Analogue Analysis and Design (ENG530/P21402) Item 1 - CW1/Laboratory ExerciseMaharshiGohelNo ratings yet
- ELEG 330L (Spring 2022) Pre-Lab (1) Transmission Lines' Characteristics Under No-Load ConditionsDocument1 pageELEG 330L (Spring 2022) Pre-Lab (1) Transmission Lines' Characteristics Under No-Load ConditionsMaharshiGohelNo ratings yet
- Indefinite Integration of Analytic FunctionsDocument4 pagesIndefinite Integration of Analytic FunctionsMaharshiGohelNo ratings yet
- CodeDocument2 pagesCodeMaharshiGohelNo ratings yet
- SlideDocument5 pagesSlideMaharshiGohelNo ratings yet
- HW3 MatlabDocument2 pagesHW3 MatlabMaharshiGohelNo ratings yet
- Fundamentals: Biosystems, Molecular Recognition, Electrical Conduction, Quantum IdeasDocument5 pagesFundamentals: Biosystems, Molecular Recognition, Electrical Conduction, Quantum IdeasMaharshiGohelNo ratings yet
- ECE 423 - Fall 2021 - Chapter 1 MatlabDocument1 pageECE 423 - Fall 2021 - Chapter 1 MatlabMaharshiGohelNo ratings yet
- Application of Quasi Z Source Inverter On Electric Vehicle With Regenerative BrakingDocument9 pagesApplication of Quasi Z Source Inverter On Electric Vehicle With Regenerative BrakingMaharshiGohelNo ratings yet
- 22Document2 pages22MaharshiGohelNo ratings yet
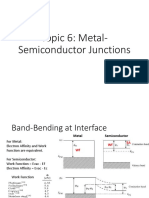
- Topic 6: Metal-Semiconductor JunctionsDocument10 pagesTopic 6: Metal-Semiconductor JunctionsMaharshiGohelNo ratings yet
- New Microsoft Word DocumentDocument2 pagesNew Microsoft Word DocumentMaharshiGohelNo ratings yet
- Sustainability 09 01234Document19 pagesSustainability 09 01234MaharshiGohelNo ratings yet
- Bill No.2: Sr. No Description Quantity Rate AmountDocument1 pageBill No.2: Sr. No Description Quantity Rate AmountMaharshiGohelNo ratings yet
- C - A Cross Correlation Control Approach For Multifunctional SPV SystemDocument6 pagesC - A Cross Correlation Control Approach For Multifunctional SPV SystemMaharshiGohelNo ratings yet
- Manager - Network Engineering: Productive Data Solutions, IncDocument7 pagesManager - Network Engineering: Productive Data Solutions, IncMaharshiGohelNo ratings yet
- Lab 3: Wave Phenomena in The Ripple Tank: WavelengthDocument12 pagesLab 3: Wave Phenomena in The Ripple Tank: WavelengthAhmad ShaqeerNo ratings yet
- M7500 Ultra HPHT Rheometer BrochureDocument1 pageM7500 Ultra HPHT Rheometer Brochuremega87_2000No ratings yet
- Physics Homework 0-4: Name: Graciella Fabiona Turangan (菲奥娜) STUDENT ID: 10460348771 Major: Mechanical EngineeringDocument3 pagesPhysics Homework 0-4: Name: Graciella Fabiona Turangan (菲奥娜) STUDENT ID: 10460348771 Major: Mechanical Engineeringrifky shawnNo ratings yet
- Structural Analysis: Lecture SeriesDocument9 pagesStructural Analysis: Lecture SeriesSourNo ratings yet
- Compression Test em 327: Mechanics of Materials Laboratory: ObjectivesDocument5 pagesCompression Test em 327: Mechanics of Materials Laboratory: Objectivesrajenkoley88% (8)
- Lift Cap Drill FluidDocument48 pagesLift Cap Drill Fluiddn1366No ratings yet
- Atomic Structure & Interatomic Bonding 原子結構與原子間的鍵結: Issues To Address..Document64 pagesAtomic Structure & Interatomic Bonding 原子結構與原子間的鍵結: Issues To Address..Farida TaniaNo ratings yet
- 3 Mass Balance Agro1 PDFDocument28 pages3 Mass Balance Agro1 PDFLiam LagartoNo ratings yet
- HT Practice Problems PDFDocument2 pagesHT Practice Problems PDFChinnarao PulapaNo ratings yet
- Problem Set A: Electrostatic FieldsDocument2 pagesProblem Set A: Electrostatic FieldsfsfsfsNo ratings yet
- Engineering Mechanics Question BankDocument59 pagesEngineering Mechanics Question BankvelavansuNo ratings yet
- Change of Standard Gibbs Free Energy For The Decomposition of Sodium Hydrogen CarbonaDocument13 pagesChange of Standard Gibbs Free Energy For The Decomposition of Sodium Hydrogen CarbonaEuphoria V KhosaNo ratings yet
- Platform Screen DoorDocument2 pagesPlatform Screen DoorethjetjetNo ratings yet
- Journal of Philosophy, Inc. The Journal of PhilosophyDocument15 pagesJournal of Philosophy, Inc. The Journal of Philosophycaruiz69No ratings yet
- CH 3 Load and Stress Analysis Shigley Ed 9Document139 pagesCH 3 Load and Stress Analysis Shigley Ed 9Adi Rusdi Sholih100% (1)
- Notes On Q M C Delta TDocument2 pagesNotes On Q M C Delta TDing30180No ratings yet
- Full Download Ebook Ebook PDF Orbital Mechanics For Engineering Students Aerospace Engineering 4th Edition PDFDocument42 pagesFull Download Ebook Ebook PDF Orbital Mechanics For Engineering Students Aerospace Engineering 4th Edition PDFjanet.martino412100% (40)
- Transient Heat ConductionDocument21 pagesTransient Heat Conductionaranna lalNo ratings yet
- Fuzzy Methods For Modelling Earthquake Induced Sloshing in Rigid ReservoirsDocument7 pagesFuzzy Methods For Modelling Earthquake Induced Sloshing in Rigid ReservoirsЕлена СтрельниковаNo ratings yet
- Gas/Liquids Separators - Part 3: Quantifying Separation PerformanceDocument14 pagesGas/Liquids Separators - Part 3: Quantifying Separation PerformanceWendellReeceFrankNo ratings yet
- Nmo & DmoDocument29 pagesNmo & DmoJessica Julien100% (1)
- Hemali Davande Et Al - Quantum Chemistry-Based Force Field For Simulations of Energetic Dinitro CompoundsDocument33 pagesHemali Davande Et Al - Quantum Chemistry-Based Force Field For Simulations of Energetic Dinitro CompoundsPomaxxNo ratings yet
- Vibrations of Shells and PlatesDocument586 pagesVibrations of Shells and PlatesAres ZhaoNo ratings yet
- Vibration Sign of Over Hung Unknown Initial CondsDocument16 pagesVibration Sign of Over Hung Unknown Initial Condsridzim4638No ratings yet
- Principal StressesDocument15 pagesPrincipal StressesTibebu MerideNo ratings yet
- Aristotle and Galileo On MotionDocument46 pagesAristotle and Galileo On MotionMaria TheresaNo ratings yet
- 1st Year IPE Important QuestionsDocument2 pages1st Year IPE Important QuestionsNAVEEN PAUL UNDINo ratings yet
- 12th Physics Full Book MCQs PDFDocument43 pages12th Physics Full Book MCQs PDFshahid abbas82% (11)
- LAB 7 MAE 4333 Daniel Perez & Trevor KaaseDocument4 pagesLAB 7 MAE 4333 Daniel Perez & Trevor Kaasedaniel perezNo ratings yet