You might also like
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Department of Electronics and Communication Engineering Assignment No: 1 Module Name: Control Systems Module Code: ELEC 20005.2 Session: ADocument18 pagesDepartment of Electronics and Communication Engineering Assignment No: 1 Module Name: Control Systems Module Code: ELEC 20005.2 Session: AaneebaNo ratings yet
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelNo ratings yet
- Assignment 1Document14 pagesAssignment 1aneebaNo ratings yet
- Solution Assignment 4Document9 pagesSolution Assignment 4sushant sharmaNo ratings yet
- Steady State ErrorsDocument33 pagesSteady State Errorsasma mushtaqNo ratings yet
- 18.04 Practice Problems Laplace Transform, Spring 2018 SolutionsDocument3 pages18.04 Practice Problems Laplace Transform, Spring 2018 SolutionsMelindaNo ratings yet
- Homework 6 - SolutionsDocument9 pagesHomework 6 - SolutionsAztvNo ratings yet
- Mid Sem SolDocument6 pagesMid Sem SolNeils BohrNo ratings yet
- HW 5 SolDocument10 pagesHW 5 SolPedroNo ratings yet
- 990uf Eeec-ControlDocument25 pages990uf Eeec-ControlMarshaNo ratings yet
- 222 ED3BM1.pe21073514.Actividades EDB Dep2 TL 2022 2Document4 pages222 ED3BM1.pe21073514.Actividades EDB Dep2 TL 2022 2Flor Alejandra Piña RodriguezNo ratings yet
- Week 4 SolutionDocument6 pagesWeek 4 SolutionRaja KumarNo ratings yet
- HW1 SolutionsDocument3 pagesHW1 SolutionsMuhammad AbubakerNo ratings yet
- Lab 02Document2 pagesLab 02CHEANG HOR PHENGNo ratings yet
- Assignment 1Document2 pagesAssignment 1Joe NguyenNo ratings yet
- CH 02Document42 pagesCH 02Whats UPNo ratings yet
- EE 351 Spring 2021 Homework 4 SolutionsDocument3 pagesEE 351 Spring 2021 Homework 4 SolutionsKalenNo ratings yet
- HW9 SolutionsDocument5 pagesHW9 SolutionsAndreas mNo ratings yet
- EEET2197 Tute2 SolnDocument5 pagesEEET2197 Tute2 SolnCollin lcwNo ratings yet
- 21 Continuous-Time Second-Order Systems: Solutions To Recommended ProblemsDocument15 pages21 Continuous-Time Second-Order Systems: Solutions To Recommended ProblemsHaren ShylakNo ratings yet
- Canonical Forms, Realizations, Observability: Morten O. Alver (Based On Slides by Morten D. Pedersen)Document34 pagesCanonical Forms, Realizations, Observability: Morten O. Alver (Based On Slides by Morten D. Pedersen)Wiccy IhenaNo ratings yet
- ELEN90055 Control Systems: Worksheet 3 - Solutions To Starred ProblemsDocument3 pagesELEN90055 Control Systems: Worksheet 3 - Solutions To Starred ProblemsMingyue WangNo ratings yet
- Root LocusDocument33 pagesRoot LocusRajendar PonagantiNo ratings yet
- EE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoDocument3 pagesEE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoAmal AhmedNo ratings yet
- Homework 2 SolDocument3 pagesHomework 2 SolMatondo ReubenNo ratings yet
- Solution Assignment 2Document7 pagesSolution Assignment 2sushant sharmaNo ratings yet
- EEET2109 MST 2014 Answers PDFDocument4 pagesEEET2109 MST 2014 Answers PDFCollin lcwNo ratings yet
- Boyce ODEch 6 S 4 P 04Document3 pagesBoyce ODEch 6 S 4 P 04Feby ArdhaniNo ratings yet
- Solution A2 NPTEL Control Engg Jan April 2020Document6 pagesSolution A2 NPTEL Control Engg Jan April 2020Akhil NameirakpamNo ratings yet
- Part-A: All AllDocument15 pagesPart-A: All AllMaharshiGohelNo ratings yet
- B.E./B.Tech. Degree Examinations, November/December 2014: Chennai - 130Document23 pagesB.E./B.Tech. Degree Examinations, November/December 2014: Chennai - 130B Vignesh BabuNo ratings yet
- Applications of Laplace TransformsDocument11 pagesApplications of Laplace Transformswealthyjaneabletes12No ratings yet
- Control Most Impo FileDocument72 pagesControl Most Impo FileSumit BahlNo ratings yet
- 843uf CS-ABCDocument16 pages843uf CS-ABCMarshaNo ratings yet
- HwsDocument9 pagesHwshudha69No ratings yet
- Control ECM2105: Laplace Transform Examples: L (Sinh (At) ) A S A L (Cosh (At) ) - Hint: What IsDocument1 pageControl ECM2105: Laplace Transform Examples: L (Sinh (At) ) A S A L (Cosh (At) ) - Hint: What IsEduardo FerreiraNo ratings yet
- AE157 Spring2015 HW 01Document3 pagesAE157 Spring2015 HW 01reiner satrioNo ratings yet
- Time Response of Systems: 10.1 Some Standard Time ResponsesDocument8 pagesTime Response of Systems: 10.1 Some Standard Time ResponseskiranNo ratings yet
- Homework 1Document2 pagesHomework 1Vu LeNo ratings yet
- EE 250 - Assignment 1Document2 pagesEE 250 - Assignment 1Manish MeenaNo ratings yet
- Assignment 11Document6 pagesAssignment 11Arvind SahuNo ratings yet
- CT203: Signals & Systems Tutorial 13 - Laplace Transform and SamplingDocument2 pagesCT203: Signals & Systems Tutorial 13 - Laplace Transform and SamplingKiruba KNo ratings yet
- Chapter 8 IMP-Internal Model Principle and Repetitive ControlDocument17 pagesChapter 8 IMP-Internal Model Principle and Repetitive ControlFatihNo ratings yet
- ME 380 Chapter 2 HW Solution: Review QuestionsDocument5 pagesME 380 Chapter 2 HW Solution: Review QuestionsVisakan ParameswaranNo ratings yet
- Lecture 20Document12 pagesLecture 20RakshitTiwariNo ratings yet
- Notes LT3Document16 pagesNotes LT3osmanfıratNo ratings yet
- Indian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Document2 pagesIndian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Black ReaperNo ratings yet
- Señal TransitorioDocument6 pagesSeñal TransitorioSalvador Chairez GarciaNo ratings yet
- EMT Solution ManualDocument4 pagesEMT Solution Manualatra450No ratings yet
- Ijomev8n1 01 PDFDocument4 pagesIjomev8n1 01 PDFJulioCesarMohnsamNo ratings yet
- M T Laplace 5Document3 pagesM T Laplace 5Albert De Jesús Díaz VelascoNo ratings yet
- Tugas 9 - Desain Filter Analog FinalDocument6 pagesTugas 9 - Desain Filter Analog FinalA. Nicko V.No ratings yet
- EEET2197 Tute3 SolnDocument7 pagesEEET2197 Tute3 SolnCollin lcwNo ratings yet
- 9 - Steady State 2Document7 pages9 - Steady State 2athenalavegaNo ratings yet
- Chapter 5 HW Solution: Review QuestionsDocument6 pagesChapter 5 HW Solution: Review QuestionslgNo ratings yet
- Software Engineering 3DX3 Slides 2: Modelling in The Frequency DomainDocument94 pagesSoftware Engineering 3DX3 Slides 2: Modelling in The Frequency DomainNicolas Quispe AguilarNo ratings yet
- Test-2 - Vtrol Systems PDFDocument19 pagesTest-2 - Vtrol Systems PDFSumit KumarNo ratings yet
- 6 Exercises Solutions 2010 PDFDocument88 pages6 Exercises Solutions 2010 PDFTrường TùngNo ratings yet
- (123doc) - Tai-Lieu-Thi-Tuyen-Loc-Dau-Nghi-Son-Distilation-Reference-1 PDFDocument29 pages(123doc) - Tai-Lieu-Thi-Tuyen-Loc-Dau-Nghi-Son-Distilation-Reference-1 PDFTrường Tùng LýNo ratings yet
- (123doc) - Tai-Lieu-Thi-Tuyen-Loc-Dau-Nghi-Son-Piping-Assessment-Quesion12 PDFDocument17 pages(123doc) - Tai-Lieu-Thi-Tuyen-Loc-Dau-Nghi-Son-Piping-Assessment-Quesion12 PDFTrường Tùng LýNo ratings yet
- (123doc) - Tai-Lieu-Thi-Tuyen-Loc-Dau-Nghi-Son-Pumps-Sumary1 PDFDocument12 pages(123doc) - Tai-Lieu-Thi-Tuyen-Loc-Dau-Nghi-Son-Pumps-Sumary1 PDFTrường Tùng LýNo ratings yet
- Ethylbenzene: Hazard SummaryDocument4 pagesEthylbenzene: Hazard SummaryTrường Tùng LýNo ratings yet
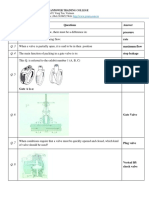
- No. Questions Answer Pressure Rate Maximum Flow Stop LeakageDocument7 pagesNo. Questions Answer Pressure Rate Maximum Flow Stop LeakageTrường Tùng LýNo ratings yet
- ASME Sec II Part D PDFDocument862 pagesASME Sec II Part D PDFCarlosIkeda88% (8)
- Advanced Program Hanoi University of Mining and Geology: Methyl Acetate Plant DesignDocument21 pagesAdvanced Program Hanoi University of Mining and Geology: Methyl Acetate Plant DesignTrường Tùng LýNo ratings yet
- Safety Design Aspects: Imran Bokhari, Dr. S. Ahmed, Dr. S. QadeerDocument44 pagesSafety Design Aspects: Imran Bokhari, Dr. S. Ahmed, Dr. S. QadeerTrường Tùng LýNo ratings yet
- Learning About The of Nghi Son Refinery: Rude Istillation NitDocument17 pagesLearning About The of Nghi Son Refinery: Rude Istillation NitTrường Tùng LýNo ratings yet
- Graduation Thesis: Ministry of Education and Training Hanoi University of Mining and GeologyDocument59 pagesGraduation Thesis: Ministry of Education and Training Hanoi University of Mining and GeologyTrường Tùng LýNo ratings yet
- Graduation Thesis: Supervisor: Dr. Cong Ngoc Thang Student: Ly Truong TungDocument23 pagesGraduation Thesis: Supervisor: Dr. Cong Ngoc Thang Student: Ly Truong TungTrường Tùng LýNo ratings yet
- Gra thesis-đã chuyển đổi PDFDocument56 pagesGra thesis-đã chuyển đổi PDFTrường Tùng LýNo ratings yet
- Cttt K6: Mã sinh viên Họ đệm Tên Ngày sinh Giới Tên Đề TàiDocument4 pagesCttt K6: Mã sinh viên Họ đệm Tên Ngày sinh Giới Tên Đề TàiTrường Tùng LýNo ratings yet
- Cttt K6: Mã sinh viên Họ đệm Tên Ngày sinh Giới Tên Đề TàiDocument4 pagesCttt K6: Mã sinh viên Họ đệm Tên Ngày sinh Giới Tên Đề TàiTrường Tùng LýNo ratings yet
- Vietnam Energy Outlook Report 2017 EngDocument78 pagesVietnam Energy Outlook Report 2017 EngHuynh Thi Minh TrangNo ratings yet
- Data Exp 2Document74 pagesData Exp 2Trường Tùng LýNo ratings yet
- ECH155B Memo Exp 2Document7 pagesECH155B Memo Exp 2Trường Tùng LýNo ratings yet
- ECH155B Exp 2Document7 pagesECH155B Exp 2Trường Tùng LýNo ratings yet
- Graduation Thesis: Ministry of Education and Training Hanoi University of Mining and GeologyDocument59 pagesGraduation Thesis: Ministry of Education and Training Hanoi University of Mining and GeologyTrường Tùng LýNo ratings yet
- Outlook For The Development of Oil and Gas Industry in VietnamDocument5 pagesOutlook For The Development of Oil and Gas Industry in VietnamTrường Tùng LýNo ratings yet
- ECH155B Exp2Document29 pagesECH155B Exp2Trường Tùng LýNo ratings yet
- Storage Tank Design Calculations API 650Document38 pagesStorage Tank Design Calculations API 650Shamik ChowdhuryNo ratings yet
- Graduation Thesis: Ministry of Education and Training Hanoi University of Mining and GeologyDocument59 pagesGraduation Thesis: Ministry of Education and Training Hanoi University of Mining and GeologyTrường Tùng LýNo ratings yet
- Dữ liệu thí nghiệm 2Document4 pagesDữ liệu thí nghiệm 2Trường Tùng LýNo ratings yet
- Pressure Vessel Handbook Megyesy PDFDocument494 pagesPressure Vessel Handbook Megyesy PDFenriqueNo ratings yet
- LPG Storage TankDocument5 pagesLPG Storage Tankجیهاد عبدالكريم فارسNo ratings yet
- 25.pdf-đã chuyển đổiDocument9 pages25.pdf-đã chuyển đổiTrường Tùng LýNo ratings yet
- Vdocuments - MX - Vietnam Chemical Industry Report q2 Vietnam Market 32 Definition and ClassificationDocument131 pagesVdocuments - MX - Vietnam Chemical Industry Report q2 Vietnam Market 32 Definition and ClassificationTrường Tùng LýNo ratings yet
- JOINTS (QW-402) : in Accordance With QW-200.1, Section IX, ASME BPVCDocument7 pagesJOINTS (QW-402) : in Accordance With QW-200.1, Section IX, ASME BPVCTrường Tùng LýNo ratings yet
- GlobalizationDocument6 pagesGlobalizationSanskruti PathakNo ratings yet
- Quantum: PhysicsDocument11 pagesQuantum: PhysicsVinodNo ratings yet
- Characteristics of A Good CurriculumDocument20 pagesCharacteristics of A Good CurriculumRICHARD ALFEO ORIGINALNo ratings yet
- Descriptive TextDocument3 pagesDescriptive TextcaaaaaNo ratings yet
- Year 9 Mathematics Term 2 Exam PaperDocument20 pagesYear 9 Mathematics Term 2 Exam PaperAyemyanandar KyiNo ratings yet
- Pipeline and Riser Loss of Containment (PARLOC 2012) 6th EditionDocument15 pagesPipeline and Riser Loss of Containment (PARLOC 2012) 6th EditionGUILLERMO ALEJANDRO ARMENDARIZ SALAS100% (1)
- Green Chemistry ModuleDocument17 pagesGreen Chemistry ModuleAniruddhNo ratings yet
- Magic Arrays - Multichannel Microphone Array Design Applied To Microphone Arrays Generating Interformat CompatabilityDocument19 pagesMagic Arrays - Multichannel Microphone Array Design Applied To Microphone Arrays Generating Interformat CompatabilitymewarulesNo ratings yet
- Graded Assignment: Unit Test, Part 2: Radicals and Complex NumbersDocument3 pagesGraded Assignment: Unit Test, Part 2: Radicals and Complex NumbersManuk SogomonyanNo ratings yet
- Critically Discuss About Major Features of Water Resource Act, 2049 B.SDocument12 pagesCritically Discuss About Major Features of Water Resource Act, 2049 B.SPurple DreamNo ratings yet
- Mobatec Modeller Intorduction Course Tutorial IDocument10 pagesMobatec Modeller Intorduction Course Tutorial IMohammad Yasser RamzanNo ratings yet
- 7 Ways To Better Your LetteringDocument5 pages7 Ways To Better Your LetteringLuciana Freire0% (2)
- Why Are Engineers Considered An Important Segment of The Society?Document2 pagesWhy Are Engineers Considered An Important Segment of The Society?Angellete D. GacayanNo ratings yet
- Tugas Bahasa InggrisDocument3 pagesTugas Bahasa InggrisDesy Lianti EchiNo ratings yet
- Housekeeping Services NCII Quarter 3 PDF HousekeepingDocument1 pageHousekeeping Services NCII Quarter 3 PDF HousekeepingSalve RegineNo ratings yet
- ROBOTICS (MEB-465) : Quiz QuestionsDocument21 pagesROBOTICS (MEB-465) : Quiz QuestionsVishal Dhiman100% (2)
- Institute of Southern Punjab Multan: Syed Zohair Quain Haider Lecturer ISP MultanDocument47 pagesInstitute of Southern Punjab Multan: Syed Zohair Quain Haider Lecturer ISP MultanCh MaaanNo ratings yet
- Adams ST - Pierre Post Qualitative InquiryDocument7 pagesAdams ST - Pierre Post Qualitative InquiryJOOST VANMAELENo ratings yet
- Top Renewable Energy Trends of 2018: Madeleine HoweDocument4 pagesTop Renewable Energy Trends of 2018: Madeleine HowedubryNo ratings yet
- Grade Filipino 7 Week 1-2Document10 pagesGrade Filipino 7 Week 1-2SALEM DE LA CONCEPCIONNo ratings yet
- A Performance Management FrameworkDocument73 pagesA Performance Management Frameworkgh_sandruNo ratings yet
- A Detailed Lesson Plan in Technical Drawing Grade 8 Date: - I. ObjectivesDocument8 pagesA Detailed Lesson Plan in Technical Drawing Grade 8 Date: - I. ObjectivesJessieann Balmaceda Cabangan100% (3)
- Virtue Ethics: Deficiency ExcessDocument1 pageVirtue Ethics: Deficiency ExcesschristianNo ratings yet
- Thermoports K-KB Series Operating InstructionsDocument5 pagesThermoports K-KB Series Operating InstructionsMuhammad Ali HaiderNo ratings yet
- Technical Data Sheet: Davies Powerfloor Epoxy Floor CoatingDocument1 pageTechnical Data Sheet: Davies Powerfloor Epoxy Floor CoatingEnoki LiNo ratings yet
- Simulation-Using The Micrometer Screw GaugeDocument2 pagesSimulation-Using The Micrometer Screw GaugeAlejandro MohammedNo ratings yet
- Spatial Association Effect of Regional Pollution Control2019journal of Cleaner ProductionDocument13 pagesSpatial Association Effect of Regional Pollution Control2019journal of Cleaner ProductionArthur PimentelNo ratings yet
- Article On Water Scarcity in West Africa 04056Document2 pagesArticle On Water Scarcity in West Africa 04056chen yuxinNo ratings yet
- Theory of Corporate PersonalityDocument7 pagesTheory of Corporate PersonalityKabita SharmaNo ratings yet
- SIM Ecosytem (Grade 6)Document26 pagesSIM Ecosytem (Grade 6)Donnaville Baja VildosolaNo ratings yet