You might also like
- SAT Math Notes: by Steve Baba, PH.DDocument6 pagesSAT Math Notes: by Steve Baba, PH.Dniharika786100% (1)
- Exponential Functions: General MathematicsDocument55 pagesExponential Functions: General MathematicsStephany BartianaNo ratings yet
- Pair of Linear Equations in Two VariablesDocument7 pagesPair of Linear Equations in Two VariablesIncredible INDIANo ratings yet
- Quadratic EquationDocument13 pagesQuadratic EquationHaimen BuisanNo ratings yet
- Laplace Transform and ApplicationDocument61 pagesLaplace Transform and ApplicationafaqihudinNo ratings yet
- 1 3 Dimensional Stress TransformationDocument12 pages1 3 Dimensional Stress TransformationAisha AbuzgaiaNo ratings yet
- Laplace Transform: Dr. Ajay Singh RaghuvanshiDocument66 pagesLaplace Transform: Dr. Ajay Singh RaghuvanshiBhaskarNo ratings yet
- Course Outline: TEL252E Signals and Systems Chapter 3Document12 pagesCourse Outline: TEL252E Signals and Systems Chapter 3Muhammet ÖzdemirNo ratings yet
- Laplace TransformDocument95 pagesLaplace Transformkac2872No ratings yet
- Ch15 - Laplace Transforms IDocument45 pagesCh15 - Laplace Transforms IdadsdNo ratings yet
- LaplaceDocument173 pagesLaplaceOscar Brian OscarONo ratings yet
- EEE221 2021 - 22 Fall Lecture Notes 8Document38 pagesEEE221 2021 - 22 Fall Lecture Notes 8blackwoodsam3No ratings yet
- Lecture 2: Laplace TransformDocument58 pagesLecture 2: Laplace TransformheroNo ratings yet
- Kha-ASP06-Laplace Transform PDFDocument69 pagesKha-ASP06-Laplace Transform PDFPhạm Thành Luân100% (1)
- L11 FourierPropertiesDocument14 pagesL11 FourierPropertiesCanio NoceNo ratings yet
- Ch2 Modeling in Frequency DomainDocument66 pagesCh2 Modeling in Frequency DomainWei-Hsin CheinNo ratings yet
- Laplace TransformDocument37 pagesLaplace TransformAMIE Study Circle, RoorkeeNo ratings yet
- Lecture 04Document13 pagesLecture 04Shiju RamachandranNo ratings yet
- Chapter4 MG 2ppDocument18 pagesChapter4 MG 2ppMuhammet ÖzdemirNo ratings yet
- Unit-Vi: Mathematics-II (7HC16)Document32 pagesUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaNo ratings yet
- TheLaplaceTransform PDFDocument46 pagesTheLaplaceTransform PDFFábio ArrudaNo ratings yet
- Math4 170513085146Document47 pagesMath4 170513085146jucar fernandezNo ratings yet
- Introduction To The Laplace Transform: (Chapter 12)Document79 pagesIntroduction To The Laplace Transform: (Chapter 12)Trần VũNo ratings yet
- Excellent Does Not An Accident, But It Comes Through A Hard Work!!Document108 pagesExcellent Does Not An Accident, But It Comes Through A Hard Work!!muhd munzirNo ratings yet
- 6 Transform-Domain Approaches: 6.1 MotivationDocument46 pages6 Transform-Domain Approaches: 6.1 MotivationCHARLES MATHEWNo ratings yet
- Universidad Tecnológica de Bolívar: e A T XDocument5 pagesUniversidad Tecnológica de Bolívar: e A T XMy citaraNo ratings yet
- 002 ME31002 - Transfer Function-2020decDocument28 pages002 ME31002 - Transfer Function-2020decShek Yu LaiNo ratings yet
- Lecture 10Document14 pagesLecture 10Totan PatraNo ratings yet
- 05 SSA - Fourier SeriesDocument18 pages05 SSA - Fourier SeriesEssa Zulfikar SalasNo ratings yet
- Modeling and Simulation MEIE5121/MCTE4150 Time ResponseDocument31 pagesModeling and Simulation MEIE5121/MCTE4150 Time ResponsehazaaNo ratings yet
- Part 2.the Fourier TransformDocument38 pagesPart 2.the Fourier TransformChernet TugeNo ratings yet
- CLO 3chapter9Document80 pagesCLO 3chapter9Muhammad UsmanNo ratings yet
- Chapter 3 (Laplace Transform)Document14 pagesChapter 3 (Laplace Transform)EmmanuelNo ratings yet
- ELE 301: Signals and Systems: Prof. Paul CuffDocument19 pagesELE 301: Signals and Systems: Prof. Paul CuffAaqib Hussain ShahNo ratings yet
- WINSEM2022-23 BECE202L TH VL2022230502136 2023-03-27 Reference-Material-IIDocument97 pagesWINSEM2022-23 BECE202L TH VL2022230502136 2023-03-27 Reference-Material-IIAnooshree vijayakumarNo ratings yet
- Ee602 LaplaceDocument76 pagesEe602 LaplaceRadhi MusaNo ratings yet
- Computers and Mathematics With Applications: K. Maleknejad, M. Khodabin, M. RostamiDocument11 pagesComputers and Mathematics With Applications: K. Maleknejad, M. Khodabin, M. RostamiVNo ratings yet
- Kjangid@rtu - Ac.in 21819102020092319pmDocument23 pagesKjangid@rtu - Ac.in 21819102020092319pmGirmayNo ratings yet
- 4.1 Definition of Laplace Transform Objectives:: FT Me TTDocument11 pages4.1 Definition of Laplace Transform Objectives:: FT Me TTKhaled HassanNo ratings yet
- Laplace TransformDocument14 pagesLaplace TransformDeri RamadhanNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- CH 09Document82 pagesCH 09洪崇恩No ratings yet
- Fourier and Laplace Transforms: Indian Institute of Technology RoorkeeDocument13 pagesFourier and Laplace Transforms: Indian Institute of Technology RoorkeeShivamNo ratings yet
- Mathematical Models of Control SystemsDocument44 pagesMathematical Models of Control SystemsQuốc KhánhNo ratings yet
- Modeling in Time DomainDocument30 pagesModeling in Time Domainfarouq_razzaz2574No ratings yet
- Continuous Time Fourier Transform (CTFT) : Richard Baraniuk Melissa SelikDocument5 pagesContinuous Time Fourier Transform (CTFT) : Richard Baraniuk Melissa SelikPraveen KumarNo ratings yet
- Frequency Response of Linear Time Periodic SystemsDocument6 pagesFrequency Response of Linear Time Periodic SystemsYangNo ratings yet
- Lecture 8 ELE 301: Signals and SystemsDocument10 pagesLecture 8 ELE 301: Signals and SystemsKAGGHGNo ratings yet
- Laplace TransformsDocument122 pagesLaplace TransformsChiraag ChiruNo ratings yet
- Signal ProcessingDocument275 pagesSignal ProcessingBruno Martins100% (1)
- 10 Laplace TransDocument37 pages10 Laplace TransZairullah El-AzharNo ratings yet
- Intro FirstOrderDiffEq8EdDocument22 pagesIntro FirstOrderDiffEq8Edpak tracksNo ratings yet
- IE474 Summer2022 Nise Ch2 PartA PDFDocument33 pagesIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoNo ratings yet
- 300 Continuous Time Markov ChainsDocument78 pages300 Continuous Time Markov ChainsAli SarfrazNo ratings yet
- Laplace FormulaDocument16 pagesLaplace Formulashubh.fincherNo ratings yet
- Unit-III Laplace TransformDocument30 pagesUnit-III Laplace TransformRochakNo ratings yet
- Signals and Systems: University Tenaga NasionalDocument30 pagesSignals and Systems: University Tenaga NasionalzawirNo ratings yet
- Lec04 - Laplace and Z-TransformDocument50 pagesLec04 - Laplace and Z-TransformRehman SaleemNo ratings yet
- 06 SSA - CT Fourier TransformDocument17 pages06 SSA - CT Fourier TransformEssa Zulfikar SalasNo ratings yet
- Module-3 Laplace and Inverse Laplace Transforms PDFDocument45 pagesModule-3 Laplace and Inverse Laplace Transforms PDFPreetham N KumarNo ratings yet
- LaplaceTransform 1Document227 pagesLaplaceTransform 1Komborerai MuvhiringiNo ratings yet
- Lecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace TransformDocument30 pagesLecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace Transformanuj jainNo ratings yet
- Fourier AnalysisDocument37 pagesFourier Analysisfarouq_razzaz2574No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Chapter6 MG 2ppDocument13 pagesChapter6 MG 2ppMuhammet ÖzdemirNo ratings yet
- Chapter5 MG 2ppDocument5 pagesChapter5 MG 2ppMuhammet ÖzdemirNo ratings yet
- Course Outline: TEL252E Signals and Systems Chapter 2Document26 pagesCourse Outline: TEL252E Signals and Systems Chapter 2Muhammet ÖzdemirNo ratings yet
- Chapter4 MG 2ppDocument18 pagesChapter4 MG 2ppMuhammet ÖzdemirNo ratings yet
- The Best Constant For An Algebraic Inequality: Y.N. AliyevDocument13 pagesThe Best Constant For An Algebraic Inequality: Y.N. AliyevPerepePereNo ratings yet
- 21043-Level 7 Algebra PDFDocument75 pages21043-Level 7 Algebra PDFRey Christian EustaquioNo ratings yet
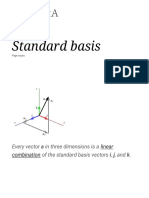
- Standard Basis - WikipediaDocument10 pagesStandard Basis - WikipediaEr Shubham RaksheNo ratings yet
- 500 Quadratic Equation Questions WorksheetDocument94 pages500 Quadratic Equation Questions WorksheetHari SaikrishnaNo ratings yet
- Numerical Method RevisionDocument11 pagesNumerical Method RevisionMichael MyamboNo ratings yet
- CH 1Document8 pagesCH 1Rekha SinghNo ratings yet
- MULTIPLE CHOICE. Choose The One Alternative That Best Completes The Statement or Answers The Question. Solve The EquationDocument4 pagesMULTIPLE CHOICE. Choose The One Alternative That Best Completes The Statement or Answers The Question. Solve The EquationNono SikwiNo ratings yet
- The Basic Finite Volume MethodDocument15 pagesThe Basic Finite Volume MethodAlasdi AhmedNo ratings yet
- Pde 1 & 2Document132 pagesPde 1 & 2Sidra ShaikhNo ratings yet
- Combined MS - C4 EdexcelDocument278 pagesCombined MS - C4 EdexcelMithun ParanitharanNo ratings yet
- Maths Ext 1 2015 ITute - Com SolutionsDocument2 pagesMaths Ext 1 2015 ITute - Com SolutionsYe ZhangNo ratings yet
- Hyperbola - Extra Practice SheetDocument25 pagesHyperbola - Extra Practice Sheetkaeshav manivannanNo ratings yet
- Formulation of Two-Dimensional Elasticity Problems: Professor M. H. SaddDocument20 pagesFormulation of Two-Dimensional Elasticity Problems: Professor M. H. SaddHendri HermawanNo ratings yet
- Real Numbers and Sequences AssignmentDocument7 pagesReal Numbers and Sequences AssignmentSURYANSH KUMAR 18110168No ratings yet
- Signal and System, IIITPDocument14 pagesSignal and System, IIITPpriyanshu raneNo ratings yet
- Simple Fixed Point Iteration Method PDFDocument11 pagesSimple Fixed Point Iteration Method PDFrajakishore mohapatraNo ratings yet
- Economics Examples of Calculus of Multivariable Function in EconomicsDocument6 pagesEconomics Examples of Calculus of Multivariable Function in Economicskayesalingay3No ratings yet
- Mittag LefflerDocument29 pagesMittag LefflervodanhvnNo ratings yet
- USA Mathematical Talent Search Solutions To Problem 4/4/17Document1 pageUSA Mathematical Talent Search Solutions To Problem 4/4/17สฮาบูดีน สาและNo ratings yet
- Co - Ordinate GeometryDocument27 pagesCo - Ordinate GeometrySabbir MasumNo ratings yet
- Practical Guide 10 Polar CoordinatesDocument7 pagesPractical Guide 10 Polar CoordinatesEmilNo ratings yet
- Problems in Analytic GeometryDocument4 pagesProblems in Analytic GeometryAnonymous bbJCZmM7VWNo ratings yet
- Maths 4u 1974 HSCDocument3 pagesMaths 4u 1974 HSCAnonymous 2EatRUNo ratings yet
- HP 28S MathematicalApplicationsSolutions (1988)Document108 pagesHP 28S MathematicalApplicationsSolutions (1988)PaulKajzerNo ratings yet
- 2 - CH 4 Vector Dot and Cross ProductDocument8 pages2 - CH 4 Vector Dot and Cross Productفاطمه محمود جليلNo ratings yet