You might also like
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsFrom EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsNo ratings yet
- Hiremath 2019 IOP Conf. Ser. Mater. Sci. Eng. 561 012124Document9 pagesHiremath 2019 IOP Conf. Ser. Mater. Sci. Eng. 561 012124Nguyễn Nhật QuangNo ratings yet
- Ultrasonic MotorsDocument46 pagesUltrasonic MotorsRitu Raj50% (2)
- The Ultrasonic Motor AbstractDocument28 pagesThe Ultrasonic Motor AbstractAnajkumarNo ratings yet
- 72 Ef 53Document2 pages72 Ef 53Robson belchiorNo ratings yet
- BH-curve of m400 SteelDocument9 pagesBH-curve of m400 SteelmorashidNo ratings yet
- 2006 - Viana - Multimodal Vibration Damping Through Piezoelectric PatchesDocument18 pages2006 - Viana - Multimodal Vibration Damping Through Piezoelectric PatchesKKiranNo ratings yet
- Magnetic Leviation Train ProjectDocument7 pagesMagnetic Leviation Train ProjectMd.Sameul IslamNo ratings yet
- International Journal of Intellectual Advancements and Research in Engineering ComputationsDocument6 pagesInternational Journal of Intellectual Advancements and Research in Engineering ComputationsHarsh AgarwallNo ratings yet
- 01 2022 Honet Design and Analysis of A Novel Plasmonic Power Splitter Based On An Air-Slot CouplerDocument3 pages01 2022 Honet Design and Analysis of A Novel Plasmonic Power Splitter Based On An Air-Slot CouplerRami WahshehNo ratings yet
- Active Vibration Damping With Electro-Active Polymers Using State Feedback ControlDocument12 pagesActive Vibration Damping With Electro-Active Polymers Using State Feedback ControlradmardNo ratings yet
- Electro Megnetic Brake SystemDocument46 pagesElectro Megnetic Brake SystemBalvinder PrajapatiNo ratings yet
- A Review of Suspension and Traction Technologies in Maglev TrainsDocument7 pagesA Review of Suspension and Traction Technologies in Maglev TrainsNickNo ratings yet
- Gas Meter BouncingDocument12 pagesGas Meter BouncingAmirul AzriNo ratings yet
- Eddy Current DampingDocument12 pagesEddy Current DampingNikhil ahireNo ratings yet
- Dokumen - Tips - Microcontroller Based Mho Relay For Distance Protection 1Document12 pagesDokumen - Tips - Microcontroller Based Mho Relay For Distance Protection 1BT20EEE052 KhushalNo ratings yet
- Overview of Different Approaches in A Multiphysics Modeling of Induction MotorDocument21 pagesOverview of Different Approaches in A Multiphysics Modeling of Induction Motorأبو كعب علاء الدينNo ratings yet
- 223-Statcom Seminar ReportDocument24 pages223-Statcom Seminar ReportHarish B. M.100% (1)
- Electromagnetic Braking System.: Dept - of Mechanical Engineering Mpec, KanpurDocument12 pagesElectromagnetic Braking System.: Dept - of Mechanical Engineering Mpec, KanpurRahul RajNo ratings yet
- Thesis SomuDocument98 pagesThesis SomuPrateek PuriNo ratings yet
- Optimization Design of The Permanent Magnent Synchronous Motor For Electric ActuatorDocument5 pagesOptimization Design of The Permanent Magnent Synchronous Motor For Electric ActuatorMano DanoNo ratings yet
- Simulation of A Double-Sided Axial Flux Brushless DC Two-Phase Motor DynamicsDocument7 pagesSimulation of A Double-Sided Axial Flux Brushless DC Two-Phase Motor Dynamicsrupalchopade5163No ratings yet
- 2009, Dynamic Simulation of Wire Rope With Contact, Etsujiro ImanishiDocument6 pages2009, Dynamic Simulation of Wire Rope With Contact, Etsujiro ImanishisantiagoNo ratings yet
- Design & Fabrication of Eddy Current Braking System: International Research Journal of Engineering and Technology (IRJET)Document7 pagesDesign & Fabrication of Eddy Current Braking System: International Research Journal of Engineering and Technology (IRJET)SerkanNo ratings yet
- Torque Quality and Comparison of InternaDocument10 pagesTorque Quality and Comparison of InternaSamuel M.No ratings yet
- Optimal Distribution System Reconfiguration For Loss Minimization Using BPSO AlgorithmDocument7 pagesOptimal Distribution System Reconfiguration For Loss Minimization Using BPSO AlgorithmM SATHISH KUMAR REDDYNo ratings yet
- Optimal Distribution System Reconfiguration For Loss Minimization Using BPSO AlgorithmDocument7 pagesOptimal Distribution System Reconfiguration For Loss Minimization Using BPSO AlgorithmM SATHISH KUMAR REDDYNo ratings yet
- InternationalDocument11 pagesInternationalheeral patelNo ratings yet
- Selected PDFDocument6 pagesSelected PDFMadhu SudhanNo ratings yet
- Jawaharlal Nehru Technological University Kakinada: Iv B. Tech - I Semester T I M E T A B L EDocument10 pagesJawaharlal Nehru Technological University Kakinada: Iv B. Tech - I Semester T I M E T A B L EMani KantaNo ratings yet
- The Ultrasonic Motor Is Characterized by ADocument28 pagesThe Ultrasonic Motor Is Characterized by ASanchit GargNo ratings yet
- Rotor Design of High-Speed Permanent Magnet Synchronous Motors Considering Rotor Magnet and Sleeve MaterialsDocument4 pagesRotor Design of High-Speed Permanent Magnet Synchronous Motors Considering Rotor Magnet and Sleeve MaterialsnaveenNo ratings yet
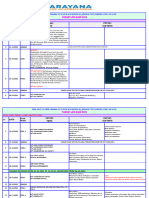
- (Physics) - FINAL - SR IIT CO SUPER CHAINA& CO SC N120& N1202023-24) - REVISION TEST SCHEDULE (CODE - 09-10-2023)Document22 pages(Physics) - FINAL - SR IIT CO SUPER CHAINA& CO SC N120& N1202023-24) - REVISION TEST SCHEDULE (CODE - 09-10-2023)avinash.aa4623No ratings yet
- Eddy Current Brake - Manyetik FrenDocument10 pagesEddy Current Brake - Manyetik FrenAhmet CoşkunNo ratings yet
- Dutkiewicz 2019 IOP Conf. Ser. Mater. Sci. Eng. 471 052029Document10 pagesDutkiewicz 2019 IOP Conf. Ser. Mater. Sci. Eng. 471 052029Federico ZurbriggenNo ratings yet
- Lecture No. 1Document22 pagesLecture No. 1mina williamNo ratings yet
- Magnectic Drill Pro 51 UniversalDocument1 pageMagnectic Drill Pro 51 UniversalopulitheNo ratings yet
- SYNOPSIS About BrakesDocument6 pagesSYNOPSIS About BrakesTiNtiNNo ratings yet
- High-Performance Sensorless PMSM Drive With Extended Kalman Filter SimulinkDocument10 pagesHigh-Performance Sensorless PMSM Drive With Extended Kalman Filter SimulinkBook4AllNo ratings yet
- EMC Management and Related Technical Aspects in Railway SystemsDocument30 pagesEMC Management and Related Technical Aspects in Railway SystemssanjaigNo ratings yet
- Sae Technical Paper Series: Honeywell Engines, Systems and ServicesDocument10 pagesSae Technical Paper Series: Honeywell Engines, Systems and ServicesBook4AllNo ratings yet
- AKK System Architecture-06022020Document4 pagesAKK System Architecture-06022020lataNo ratings yet
- Power and Energy Systems: Bachelor of Science in (Bspes)Document1 pagePower and Energy Systems: Bachelor of Science in (Bspes)Ahsen ZubairNo ratings yet
- Modelling and Simulation of Electric Power Steering System Using Permanent Magnet Synchronous MotorDocument9 pagesModelling and Simulation of Electric Power Steering System Using Permanent Magnet Synchronous MotorTANG CHUANJUN - NCSRNo ratings yet
- Magnetic Gearbox For Automotive Power TransmissionsDocument15 pagesMagnetic Gearbox For Automotive Power Transmissionsjose lilloNo ratings yet
- IntroductionDocument22 pagesIntroductionShivam MishraNo ratings yet
- Acoustic-Based and Machine Learning-Driven Methods For Vehicle Fault ClassificationDocument6 pagesAcoustic-Based and Machine Learning-Driven Methods For Vehicle Fault ClassificationDerrick G.No ratings yet
- Multidisciplinary Design Optimization of An Automotive Magnetorheological Brake DesignDocument10 pagesMultidisciplinary Design Optimization of An Automotive Magnetorheological Brake DesignHemanth KrishnaNo ratings yet
- Hemispherical Resonator Gyro (Akimov $MP-043-06)Document10 pagesHemispherical Resonator Gyro (Akimov $MP-043-06)LarryLevon88No ratings yet
- 07 Chapter Linear MotorDocument37 pages07 Chapter Linear MotorMALATHY VNo ratings yet
- Electro-Thermomechanical Modelling of A BGA Assembly Subjected To A Damaging Displacement and To Random VibrationsDocument12 pagesElectro-Thermomechanical Modelling of A BGA Assembly Subjected To A Damaging Displacement and To Random VibrationssindaNo ratings yet
- Project Report HBSDocument16 pagesProject Report HBSMayank DeshpandeNo ratings yet
- Ulrich Bruenken - Business Development Manager - FEV ChinaDocument19 pagesUlrich Bruenken - Business Development Manager - FEV Chinamanaswini routNo ratings yet
- Electric Parking Brakes (EPB) : Tech TalkDocument3 pagesElectric Parking Brakes (EPB) : Tech Talkpurysan100% (2)
- Types of Building Structural Systems - Load Transmission DetailsDocument7 pagesTypes of Building Structural Systems - Load Transmission DetailsRida Abou KaramNo ratings yet
- Amrut Expo Poster 2Document1 pageAmrut Expo Poster 2Pushkraj GawaleNo ratings yet
- Electromagnetic Performance Comparison of Halbach Array Configurations in Permanent Magnet Synchronous MachineDocument5 pagesElectromagnetic Performance Comparison of Halbach Array Configurations in Permanent Magnet Synchronous Machinefong jeffNo ratings yet
- Pptonprojecttopicebs 161023181740Document18 pagesPptonprojecttopicebs 161023181740MohanNo ratings yet
- Vibration Suppression of Stepper Motors by The Electric MethodDocument5 pagesVibration Suppression of Stepper Motors by The Electric MethodTrần Tấn LộcNo ratings yet
- Electricity Generation Using Speed BumpDocument11 pagesElectricity Generation Using Speed BumpANKESHNo ratings yet
- Marketing InternshipDocument6 pagesMarketing InternshipKumar KartikeyNo ratings yet
- Traction Control System NotesDocument58 pagesTraction Control System NotesKumar KartikeyNo ratings yet
- Kumar Kartikey DSP LexyDocument84 pagesKumar Kartikey DSP LexyKumar KartikeyNo ratings yet
- Job Attitudes Situational Interview: (Psychology Assignment)Document12 pagesJob Attitudes Situational Interview: (Psychology Assignment)Kumar KartikeyNo ratings yet
- Linear Induction Motor Based Passenger Conveyor SystemDocument5 pagesLinear Induction Motor Based Passenger Conveyor SystemShailendra JaiswalNo ratings yet
- Magnetic Levitation Magnetic LevitationDocument6 pagesMagnetic Levitation Magnetic LevitationAnanth Sai YadavNo ratings yet
- Revised Ahmedabad Metro DPR Compiled 20th May 2015 PDFDocument666 pagesRevised Ahmedabad Metro DPR Compiled 20th May 2015 PDFSOMU_61No ratings yet
- Design & Performance Analysis of LSM For EMALS.Document52 pagesDesign & Performance Analysis of LSM For EMALS.dabrevipulNo ratings yet
- PB 2101 Javelin Motors Product Brochure EnglishDocument2 pagesPB 2101 Javelin Motors Product Brochure EnglishRatnesh BafnaNo ratings yet
- LinMot Data Book e RecentDocument580 pagesLinMot Data Book e RecentNemanjaGlisicNo ratings yet
- BTS Pres. EngDocument29 pagesBTS Pres. EngPaolo MarinNo ratings yet
- Hysteresis Motors 1Document10 pagesHysteresis Motors 1Nelis OosthuizenNo ratings yet
- Maglev Train PresentationDocument20 pagesMaglev Train PresentationSatya Prakash SinghNo ratings yet
- Maglev Trains Seminar Report PDFDocument13 pagesMaglev Trains Seminar Report PDFBlackadder100% (1)
- Trans Flux MotorDocument46 pagesTrans Flux MotorkoppulabroNo ratings yet
- H2W Technologies BrochureDocument32 pagesH2W Technologies BrochurenemzinhoNo ratings yet
- Presentation1 SeminarDocument18 pagesPresentation1 SeminarSatyabrataPradhanNo ratings yet
- 0185-0001-E 5V6 IG Linear Motors P01Document46 pages0185-0001-E 5V6 IG Linear Motors P01michael KetselaNo ratings yet
- Ee 1001 Special Electrical MachinesDocument7 pagesEe 1001 Special Electrical MachinessuriyarajeNo ratings yet
- LIMDocument18 pagesLIMSairam SirasapalliNo ratings yet
- BECKHOFF - XTS SystemsDocument36 pagesBECKHOFF - XTS SystemsJorge_Andril_5370No ratings yet
- Maglev Transportation: BY: Satyajit Biswal REGD - NO:0801214400Document19 pagesMaglev Transportation: BY: Satyajit Biswal REGD - NO:0801214400Dev KumarNo ratings yet
- Linear MotorsDocument9 pagesLinear Motorssivu9354No ratings yet
- CV Raho 2020 PDFDocument5 pagesCV Raho 2020 PDFraholiveiraNo ratings yet
- Drive Technology Power Electronics Electrical Machines CatalogDocument93 pagesDrive Technology Power Electronics Electrical Machines CatalogMasoNo ratings yet
- International PrecedingsDocument174 pagesInternational PrecedingsRize Taufiq RamadhanNo ratings yet
- Magnetic LevitationDocument26 pagesMagnetic LevitationSalil Sharma100% (1)
- Bose Suspension SystemDocument12 pagesBose Suspension SystemEjaz KNo ratings yet
- Review of Maglev Train TechnologiesDocument13 pagesReview of Maglev Train TechnologiesPrithvi RajNo ratings yet
- XTS Beckhoff eDocument32 pagesXTS Beckhoff esatish734No ratings yet
- Maglev Guideway Construction (Yamanashi Maglev Test Line)Document23 pagesMaglev Guideway Construction (Yamanashi Maglev Test Line)Haroon100% (3)
- Linear Synchronous Motors PDFDocument56 pagesLinear Synchronous Motors PDFJorge Peralta0% (1)
- EMKITDocument21 pagesEMKITThinkDefenceNo ratings yet
- Department of Mechanical EngineeringDocument18 pagesDepartment of Mechanical EngineeringMuddukrishna C ShettyNo ratings yet