You might also like
- Operational ResearchDocument2 pagesOperational ResearchKeerthiga Chandrasekar100% (4)
- 신동민 Ps8Document8 pages신동민 Ps8sdongmin488No ratings yet
- Screenshot 2022-08-01 at 8.38.49 PMDocument8 pagesScreenshot 2022-08-01 at 8.38.49 PMdivyanshvashisht22No ratings yet
- BLUE Properties of OLS Estimators and Gauss MarkovDocument9 pagesBLUE Properties of OLS Estimators and Gauss MarkovNashit AhmedNo ratings yet
- Magnetic Effects of CurrentDocument12 pagesMagnetic Effects of CurrentCHINMAY UPADHYAYA X-DNo ratings yet
- CH 07Document18 pagesCH 07yassine.bouazziNo ratings yet
- So Vo Ti So Huu TiDocument12 pagesSo Vo Ti So Huu TiNguyễn Hoàng AnhNo ratings yet
- Chemical Kinetics Class - 2 (Notes)Document30 pagesChemical Kinetics Class - 2 (Notes)ᴜsʜɴᴇᴇᴋNo ratings yet
- Lecture5 Commented Part3Document7 pagesLecture5 Commented Part3변재영No ratings yet
- P4 Oct. 2022 Model AnswersDocument13 pagesP4 Oct. 2022 Model AnswersNot.DXcr GaMeRNo ratings yet
- Quantum Field TheoryDocument4 pagesQuantum Field Theoryyeminoo1335No ratings yet
- Lect ModConvOptDocument590 pagesLect ModConvOptSamurayGomesDeAguiarBritoNo ratings yet
- Formulari RGDocument2 pagesFormulari RGVictor De Paula VilaNo ratings yet
- Biharmonic Equation: Solid Mechanics and Creeping OwDocument1 pageBiharmonic Equation: Solid Mechanics and Creeping OwRam PrakashNo ratings yet
- Emanating: BroglieDocument5 pagesEmanating: BroglieGourav SinghNo ratings yet
- Gr5205 Midterm KeyDocument13 pagesGr5205 Midterm Keyhasna.nafirNo ratings yet
- Equation TX: ParametricDocument3 pagesEquation TX: ParametricNguyễn Lê Quốc HưngNo ratings yet
- MatekDocument1 pageMatekGyevnar GergoNo ratings yet
- Formula List Matrices and DeterminantDocument11 pagesFormula List Matrices and DeterminantSujal KapoorNo ratings yet
- Microstrip Discontinuity Capacitances For Right-An81e Bends, T Junctions, and CrossingsDocument6 pagesMicrostrip Discontinuity Capacitances For Right-An81e Bends, T Junctions, and CrossingsElectronic BoyNo ratings yet
- Heat ConductionDocument12 pagesHeat ConductionNuttibase CharupengNo ratings yet
- 電動力學 L1Document18 pages電動力學 L1盧郁傑No ratings yet
- Vector (IITian Notes - Kota)Document161 pagesVector (IITian Notes - Kota)hola cholaNo ratings yet
- Instructional Module: Republic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayaDocument14 pagesInstructional Module: Republic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayaMary Jane BugarinNo ratings yet
- Assignment 3Document2 pagesAssignment 3Jitesh HemjiNo ratings yet
- M108Sect1 3Document1 pageM108Sect1 3Manfred RichthofenNo ratings yet
- 3.2 Data Approximation and Neville's Method: B K N XDocument7 pages3.2 Data Approximation and Neville's Method: B K N XAli RazaNo ratings yet
- On Maximal Function and Fractional Integral AssociDocument15 pagesOn Maximal Function and Fractional Integral Associmouna.chegaarNo ratings yet
- FinalExam ESTVA60Dec2009Document9 pagesFinalExam ESTVA60Dec2009rombiosNo ratings yet
- STA FormulaDocument5 pagesSTA Formula2023114419No ratings yet
- Cel331 Minor1 Sem1 08Document1 pageCel331 Minor1 Sem1 08donotpanicNo ratings yet
- Popis Formula 29 11 2017 PDFDocument2 pagesPopis Formula 29 11 2017 PDFPetra ŠirićNo ratings yet
- Class 15Document11 pagesClass 15Nguyễn Trà GiangNo ratings yet
- Algebraic and Transcendental FunctionsDocument2 pagesAlgebraic and Transcendental FunctionsDavid VillanuevaNo ratings yet
- Exercises: Inteqers NNDocument5 pagesExercises: Inteqers NNSupaakorn RatnaguptNo ratings yet
- Lecture7 Chapter 3 Note TakingDocument15 pagesLecture7 Chapter 3 Note TakingkkkNo ratings yet
- From Last Time Mathematical Description: Inductors in Circuits +Document5 pagesFrom Last Time Mathematical Description: Inductors in Circuits +mail2sgarg_841221144No ratings yet
- Electrical InstallationDocument23 pagesElectrical Installationmurtada18851No ratings yet
- Er) LL: TRVT! + (VZTT Fi-I"Ez) JDocument9 pagesEr) LL: TRVT! + (VZTT Fi-I"Ez) JBinura SenavirathnaNo ratings yet
- Table 1: Discrete Distributions: U U N PK N K N N NDocument2 pagesTable 1: Discrete Distributions: U U N PK N K N N NLeonardo RosenbergNo ratings yet
- Mechanics Waves and Oscillations MidsemesterDocument24 pagesMechanics Waves and Oscillations MidsemesterAshman MehraNo ratings yet
- List of Functions Involving The Error FunctionDocument20 pagesList of Functions Involving The Error FunctionBobNo ratings yet
- 1.2.4 Multiple Interfaces and The Slab ModelDocument5 pages1.2.4 Multiple Interfaces and The Slab ModelA GNo ratings yet
- Periodic Properties - UADocument4 pagesPeriodic Properties - UAtechnicalfacts31No ratings yet
- IES Electrical Engineering Paper 1 1997 PDFDocument16 pagesIES Electrical Engineering Paper 1 1997 PDFDeepti KandwalNo ratings yet
- HW1 AnswerDocument4 pagesHW1 Answeraaaa102234No ratings yet
- Lecture 2Document26 pagesLecture 2ranaaditay783No ratings yet
- 9 Goniometricke RovniceDocument2 pages9 Goniometricke RovniceKatkaNemethNo ratings yet
- Homework 2Document6 pagesHomework 2Prakhar AgrawalNo ratings yet
- Methods Lecture 2Document1 pageMethods Lecture 2KingsleyNo ratings yet
- MR 1 2023 Eulers Totient FunctionDocument11 pagesMR 1 2023 Eulers Totient FunctionDebmalya DattaNo ratings yet
- 10 Aexquadfct 090223Document4 pages10 Aexquadfct 090223AnonymousNo ratings yet
- Homework 4 Due in Class On December 7: Forcapitalabundant Useapect Jexport Butresultis (FuDocument2 pagesHomework 4 Due in Class On December 7: Forcapitalabundant Useapect Jexport Butresultis (Fu吳育瑄No ratings yet
- Tight-Binding Model - Open Solid State NotesDocument6 pagesTight-Binding Model - Open Solid State NotesRishi Paresh JoshiNo ratings yet
- 392R S19.exam.2 SolutionDocument5 pages392R S19.exam.2 SolutionMariaEstherAlguacilRodriguezNo ratings yet
- Vector Spaces Lecture NotesDocument48 pagesVector Spaces Lecture NoteswannafadedNo ratings yet
- lO弋心 弋 lO lO-: e =e =ezx =0Document1 pagelO弋心 弋 lO lO-: e =e =ezx =0allenNo ratings yet
- Binomial Theorem (Class-1)Document10 pagesBinomial Theorem (Class-1)Idhant SinghNo ratings yet
- Shortlisted Problems: (With Solutions)Document82 pagesShortlisted Problems: (With Solutions)prashant ojhaNo ratings yet
- Solid State Devices Notes Pages 55-60Document6 pagesSolid State Devices Notes Pages 55-60Mohamed Mahmoud Saad HassanNo ratings yet
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- Software Refactoring Prediction Using SVM and Optimization AlgorithmsDocument10 pagesSoftware Refactoring Prediction Using SVM and Optimization AlgorithmsDr. Mamdouh AleneziNo ratings yet
- MGMT Science Notes 01 IntroductionDocument3 pagesMGMT Science Notes 01 IntroductionmichelleNo ratings yet
- An Introduction To Benefit of The Doubt' Composite IndicatorsDocument36 pagesAn Introduction To Benefit of The Doubt' Composite Indicatorssunil kumarNo ratings yet
- Model Predictive Control PHD ThesisDocument7 pagesModel Predictive Control PHD ThesisWendy Belieu100% (2)
- D R A G Coefficient Curve Identification of Projectiles From Flight Tests Via Optimal Dynamic Fitting 1Document10 pagesD R A G Coefficient Curve Identification of Projectiles From Flight Tests Via Optimal Dynamic Fitting 1yararaNo ratings yet
- Simionescu 2016Document15 pagesSimionescu 2016hilmy yusuf maulanaNo ratings yet
- C6 - Sales and Operations Planning - Capacity Planning and Aggregate Production Planning RSVDocument74 pagesC6 - Sales and Operations Planning - Capacity Planning and Aggregate Production Planning RSVphuckhang33203No ratings yet
- Bundlefusion: Real-Time Globally Consistent 3D Reconstruction Using On-The-Fly Surface Re-IntegrationDocument19 pagesBundlefusion: Real-Time Globally Consistent 3D Reconstruction Using On-The-Fly Surface Re-IntegrationQelwerhsbNo ratings yet
- Advanced Production and Operation ManagementDocument3 pagesAdvanced Production and Operation Managementhussainmba30No ratings yet
- Elevator Selection With Destination Control System: January 2006Document14 pagesElevator Selection With Destination Control System: January 2006NAIR KRISHNA RAVEENDRANNo ratings yet
- Int. J. Production Economics: Yifeng Liu, Jian YangDocument14 pagesInt. J. Production Economics: Yifeng Liu, Jian YangYani PuspitaNo ratings yet
- The Vogel Approximation and North West Corner Transportation Models For Optimal Cost Distribution of Dangote CementDocument6 pagesThe Vogel Approximation and North West Corner Transportation Models For Optimal Cost Distribution of Dangote CementInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Technical Performance OptimizationDocument2 pagesTechnical Performance OptimizationBalad Al-gharebNo ratings yet
- DP by Bellman Functional EquationDocument296 pagesDP by Bellman Functional Equation.cadeau01No ratings yet
- Belfadil Et Al 2023 Leveraging Deep Reinforcement Learning For Water Distribution Systems With Large Action Spaces andDocument9 pagesBelfadil Et Al 2023 Leveraging Deep Reinforcement Learning For Water Distribution Systems With Large Action Spaces andMostafaNo ratings yet
- A Mathematical Model of Non-Destructive Disassembly ProcessDocument12 pagesA Mathematical Model of Non-Destructive Disassembly ProcessTJPRC PublicationsNo ratings yet
- Incorporating Make or Buy Analysis and Supplier SelectionDocument16 pagesIncorporating Make or Buy Analysis and Supplier SelectionVeriza AgistinNo ratings yet
- PGDAOR DDE Annamalai QPDocument3 pagesPGDAOR DDE Annamalai QPsskumar82No ratings yet
- Markov Based Quality Metrics For Generating Structured Music With Optimization TechniquesDocument1 pageMarkov Based Quality Metrics For Generating Structured Music With Optimization TechniquesDorien HerremansNo ratings yet
- Improving Canned Food Quality With Variable Retort Temperature ProcessesDocument6 pagesImproving Canned Food Quality With Variable Retort Temperature ProcessesDedy SantosoNo ratings yet
- A Review On Voltage Regulators-119Document6 pagesA Review On Voltage Regulators-119Andrey LopesNo ratings yet
- A Cruise Ship Itinerary Planning Model For Passenger SatisfactionDocument8 pagesA Cruise Ship Itinerary Planning Model For Passenger SatisfactionChrismond ParconNo ratings yet
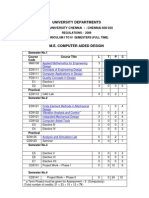
- M.E. Computer Aided Design SyllabusDocument50 pagesM.E. Computer Aided Design SyllabusJoswa CaxtonNo ratings yet
- Course: B. Tech Iii Year-I Semester Department: Year: Subject Name: Faculty Name: Unit-IDocument16 pagesCourse: B. Tech Iii Year-I Semester Department: Year: Subject Name: Faculty Name: Unit-IRishiNo ratings yet
- The Economics of Uncertanity and Information LaffontDocument348 pagesThe Economics of Uncertanity and Information LaffontAnonymous Tp6zteIONo ratings yet
- Operations Research - Class1 To Class 3Document53 pagesOperations Research - Class1 To Class 3Priyesh Wankhede50% (2)
- Lesson 1 Linear ProgrammingDocument77 pagesLesson 1 Linear Programmingasra010110No ratings yet
- Ant Colony System (ACS) Algorithms: A Performance Review On Energy Saving StrategiesDocument13 pagesAnt Colony System (ACS) Algorithms: A Performance Review On Energy Saving StrategiesInternational Journal of Innovative Science and Research TechnologyNo ratings yet