You might also like
- Powerflex 70 Reference ManualDocument214 pagesPowerflex 70 Reference ManualAnonymous AsIbqUNo ratings yet
- Astra Convertible Roof Hints and Tips PDFDocument16 pagesAstra Convertible Roof Hints and Tips PDFLuís Diogo GomesNo ratings yet
- Arduino Robot KitDocument12 pagesArduino Robot KitRohit Vaishampayan100% (1)
- Line Follower Robot Final PPT 1Document16 pagesLine Follower Robot Final PPT 1harshil mangeNo ratings yet
- Line Follower Robot for Industrial ManufacturingDocument9 pagesLine Follower Robot for Industrial ManufacturingAhuja ShivamNo ratings yet
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- Line Follower and Obstacle AvoidingDocument12 pagesLine Follower and Obstacle AvoidingFaisal Nouman60% (5)
- Vector8 PDFDocument206 pagesVector8 PDFgluykNo ratings yet
- 21.line Following RobotDocument78 pages21.line Following RobotsathishNo ratings yet
- Automatic Vacuum Cleaner: Ministry of Higher Education Herat University Engineering Faculty Mechatronics DepartmentDocument13 pagesAutomatic Vacuum Cleaner: Ministry of Higher Education Herat University Engineering Faculty Mechatronics DepartmentAziz KhaliliNo ratings yet
- Design of Smart Mechanical Grass CutterDocument4 pagesDesign of Smart Mechanical Grass CutterQhai AnimatorNo ratings yet
- Wireless 4 Dof Robotic Arm Using Mega 2560-1Document11 pagesWireless 4 Dof Robotic Arm Using Mega 2560-1Kamal HasanNo ratings yet
- Komodo Robot ManualDocument24 pagesKomodo Robot ManualPercy Wilianson Lovon RamosNo ratings yet
- Robotic ArmsDocument9 pagesRobotic ArmsAung Yell HtweNo ratings yet
- Design and Development of Automatic Seed Sowing Machine: P. Premalatha and Sharath SinghDocument4 pagesDesign and Development of Automatic Seed Sowing Machine: P. Premalatha and Sharath SinghTeshome GetachewNo ratings yet
- Irjet V7i61194Document4 pagesIrjet V7i61194Aryan ShrivaNo ratings yet
- Final ProposalDocument13 pagesFinal ProposalAzizNo ratings yet
- JETIR1804103Document6 pagesJETIR1804103Himanshu KumarNo ratings yet
- REPORTDocument22 pagesREPORThohi4808No ratings yet
- Design of Controller Board For A Lunar Rover: Electronic Basic ThesisDocument24 pagesDesign of Controller Board For A Lunar Rover: Electronic Basic ThesisMuhammad AhsanNo ratings yet
- Requirements Specification: Wireless RobotDocument7 pagesRequirements Specification: Wireless RobotAnkur GoyalNo ratings yet
- Obstacle Avoidance Robot ReportDocument28 pagesObstacle Avoidance Robot ReportFadzrul FaizNo ratings yet
- Smart Floor Cleaner Robot Using AndroidDocument5 pagesSmart Floor Cleaner Robot Using AndroidTejas chogale100% (1)
- Line Follower and Obstacle Avoidance Bot Using ArduinoDocument4 pagesLine Follower and Obstacle Avoidance Bot Using ArduinorahimNo ratings yet
- Obstacle Avoidance Robotic VehicleDocument10 pagesObstacle Avoidance Robotic VehicleSpiwe MavisNo ratings yet
- Obstacle Avoidance Robot Using Ultrasonic SensorsDocument5 pagesObstacle Avoidance Robot Using Ultrasonic SensorskentNo ratings yet
- Irjet V4i4783 PDFDocument3 pagesIrjet V4i4783 PDFBipin S CNo ratings yet
- Robotic ArmsDocument9 pagesRobotic ArmsAung Yell HtweNo ratings yet
- Advanced Military Spy Robot and Bomb Disposal: NtroductionDocument6 pagesAdvanced Military Spy Robot and Bomb Disposal: NtroductionFj Farook JunaidhNo ratings yet
- Obstacle Avoidance Robot Using ArduinoDocument2 pagesObstacle Avoidance Robot Using ArduinoDeepanshi RuhelaNo ratings yet
- Android Phone Controlled Bluetooth Robot: April 2016Document12 pagesAndroid Phone Controlled Bluetooth Robot: April 2016Fakhr Al-TimimiNo ratings yet
- Robotic ArmDocument23 pagesRobotic ArmJapnam SodhiNo ratings yet
- Arduino Based Bluetooth Controlled RobotDocument4 pagesArduino Based Bluetooth Controlled RobotTonyNo ratings yet
- Spreying and Seeding Robo".: Design and Operation of Agriculture Based Pesticide Spraying and Seeding RobotDocument16 pagesSpreying and Seeding Robo".: Design and Operation of Agriculture Based Pesticide Spraying and Seeding Robotmrunali bhopaleNo ratings yet
- Solar Powered Intelligent Grass Cutter RobotDocument5 pagesSolar Powered Intelligent Grass Cutter RobotAjayNo ratings yet
- B.TECH Final Year-PROJECT PDFDocument17 pagesB.TECH Final Year-PROJECT PDFRajuNo ratings yet
- Project - Report - Phase-1 (B5) 1 - 2 - 22-8-33Document26 pagesProject - Report - Phase-1 (B5) 1 - 2 - 22-8-33ChethanNo ratings yet
- The Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)Document6 pagesThe Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)VASANTHKUMAR M SNo ratings yet
- Gesture Controlled Robot Using ArduinoDocument9 pagesGesture Controlled Robot Using ArduinoAli Najim Al-AskariNo ratings yet
- Final Year Project WIFI CONTROL ROBOT Ijariie7393Document6 pagesFinal Year Project WIFI CONTROL ROBOT Ijariie7393NayaaNo ratings yet
- Project Report On Robotic ArmDocument17 pagesProject Report On Robotic ArmGina SreeNo ratings yet
- Final Copy of Line Follower RobotDocument10 pagesFinal Copy of Line Follower RobotPhạm Tành ĐồngNo ratings yet
- Final Paper MikimikimikiDocument8 pagesFinal Paper MikimikimikiNhoj Leahcim Sasuab ZeugirdorNo ratings yet
- Android Phone Controlled Bluetooth RobotDocument12 pagesAndroid Phone Controlled Bluetooth RobotNazmul Shikder RiyadhNo ratings yet
- Hummer-Bot Instruction ManualDocument108 pagesHummer-Bot Instruction Manualinghdj100% (1)
- Automatic Land Mine Detection and Sweeper Robot Using MicrocontrollerDocument8 pagesAutomatic Land Mine Detection and Sweeper Robot Using Microcontrollersrujana reddyNo ratings yet
- Bluetooth Controlled Arduino Robotic Arm JournalDocument6 pagesBluetooth Controlled Arduino Robotic Arm JournalKarneshwar SannamaniNo ratings yet
- Smart TrainDocument8 pagesSmart Trainrajmuthu.tn8068No ratings yet
- B0610011017 PDFDocument8 pagesB0610011017 PDFEdiNo ratings yet
- Digital Signal Filtering RobotDocument8 pagesDigital Signal Filtering RobotNhoj Leahcim Sasuab ZeugirdorNo ratings yet
- Design and Development of Robotic Arm For Cutting Tree PDFDocument10 pagesDesign and Development of Robotic Arm For Cutting Tree PDFHamza HebNo ratings yet
- IRJET V7I5770 With Cover Page v2Document6 pagesIRJET V7I5770 With Cover Page v2pal sarveshNo ratings yet
- Designing Motion System for Wheeled Robot Based on Arduino ATmega 128Document18 pagesDesigning Motion System for Wheeled Robot Based on Arduino ATmega 128silvesNo ratings yet
- Nietjet 1002S 2022 003Document6 pagesNietjet 1002S 2022 003NIET Journal of Engineering & Technology(NIETJET)No ratings yet
- Night Patrol RobotDocument10 pagesNight Patrol RobotBlack Hat100% (1)
- Autonomous Vehicle SystemDocument8 pagesAutonomous Vehicle SystemIJRASETPublicationsNo ratings yet
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 pagesXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYNo ratings yet
- IJSRD Vol 3 Issue 02 2015 ISSN online 2321-0613Document3 pagesIJSRD Vol 3 Issue 02 2015 ISSN online 2321-0613Caurelou PitocNo ratings yet
- Documents On CampusDocument4 pagesDocuments On Campusjhon gebreNo ratings yet
- Design and Development of CNC Based Laser EngraverDocument5 pagesDesign and Development of CNC Based Laser Engraverautomobpc5031No ratings yet
- Advanced Military Spying and Bomb Disposal Robot: Senthamizh.R1, Subbu Lakshmi.P1, Subhashree.P1, Prof. M.Priyadarshini2Document3 pagesAdvanced Military Spying and Bomb Disposal Robot: Senthamizh.R1, Subbu Lakshmi.P1, Subhashree.P1, Prof. M.Priyadarshini2xoxoNo ratings yet
- Gripper Robot: Solution Architecture Document ProjectDocument9 pagesGripper Robot: Solution Architecture Document Projectmonika nagarNo ratings yet
- Chapter Two Literature ReviewDocument5 pagesChapter Two Literature ReviewLarweh DanielNo ratings yet
- FARUK ABDUL SHAKUR - 01211011D - Truth TableDocument2 pagesFARUK ABDUL SHAKUR - 01211011D - Truth TableLarweh DanielNo ratings yet
- Smart Solar Grass Cutter 2Document9 pagesSmart Solar Grass Cutter 2Larweh DanielNo ratings yet
- Final ProjectDocument7 pagesFinal ProjectLarweh DanielNo ratings yet
- Eee 331Document1 pageEee 331Larweh DanielNo ratings yet
- Paz-Soldan AtomClockDocument84 pagesPaz-Soldan AtomClockdarrelNo ratings yet
- Current TransformersDocument1 pageCurrent Transformerswec11011No ratings yet
- AICTE B.Tech EE I Sem NewDocument2 pagesAICTE B.Tech EE I Sem NewKrishnaNo ratings yet
- Technical Specifications Upgrade and Installation of Ground Cables in The Anaya Nature Resort-BintanDocument3 pagesTechnical Specifications Upgrade and Installation of Ground Cables in The Anaya Nature Resort-Bintanrobotik smkn1binutNo ratings yet
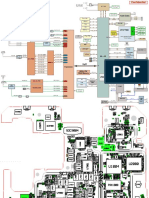
- Sm-g770f SVC ManualDocument55 pagesSm-g770f SVC Manualasish dalalNo ratings yet
- ESRTOS Mini Project A-37Document6 pagesESRTOS Mini Project A-37Avishkar MalunjkarNo ratings yet
- Type Testing A 420 KV 63 Ka 50 and 60 HZ Circuit Breaker Based On C4 FNCO2O2 Mixture TechnologyDocument10 pagesType Testing A 420 KV 63 Ka 50 and 60 HZ Circuit Breaker Based On C4 FNCO2O2 Mixture TechnologyChiranjeev SahooNo ratings yet
- Energizer ER HMOF600 ManualDocument2 pagesEnergizer ER HMOF600 ManualLogicXNo ratings yet
- Our Homes Refrigerator Wiring DiagramDocument3 pagesOur Homes Refrigerator Wiring DiagramneilNo ratings yet
- Office at Biratnagar Mep Works Summary of Costs Section B: Electrical and Allied Works Sl. Description Total AmountDocument36 pagesOffice at Biratnagar Mep Works Summary of Costs Section B: Electrical and Allied Works Sl. Description Total AmountyogenNo ratings yet
- User Manual: Telemetry UnitDocument18 pagesUser Manual: Telemetry Unitvincent_devine777dNo ratings yet
- Iris Power Epoxy Mica Capacitors (80 PF) : Partial Discharge Sensors For Testing High Voltage Electrical EquipmentDocument2 pagesIris Power Epoxy Mica Capacitors (80 PF) : Partial Discharge Sensors For Testing High Voltage Electrical Equipmentmani_208eeNo ratings yet
- Unit-I EsDocument53 pagesUnit-I Eschethan.naik24No ratings yet
- Assignment 9 Landing GearDocument7 pagesAssignment 9 Landing GearAfrina PutraNo ratings yet
- Power System EngineeringDocument13 pagesPower System EngineeringNazmul IslamNo ratings yet
- 10-Port Antenna with 5 Integrated RCUsDocument3 pages10-Port Antenna with 5 Integrated RCUsRobertNo ratings yet
- Industrial Metal Detector: Operator ManualDocument40 pagesIndustrial Metal Detector: Operator ManualINMETRO SACNo ratings yet
- Gryphon I GM4200 Regulatory Addendum (ENG)Document2 pagesGryphon I GM4200 Regulatory Addendum (ENG)soporteNo ratings yet
- Determining Optical Properties Using LensesDocument15 pagesDetermining Optical Properties Using LensesHarishankar SNo ratings yet
- Harman Kardon hd990 SMDocument61 pagesHarman Kardon hd990 SMклимNo ratings yet
- Physics Practical PDF - 12hhhDocument54 pagesPhysics Practical PDF - 12hhhmyjadavfamilyNo ratings yet
- Beurer MP 84 Manicure:Pedicure Set InstructionsDocument23 pagesBeurer MP 84 Manicure:Pedicure Set InstructionsfelipesanchesNo ratings yet
- Product Data Sheet: PRD40 Modular Surge Arrester - 3 Poles + N - 340VDocument2 pagesProduct Data Sheet: PRD40 Modular Surge Arrester - 3 Poles + N - 340VMadusanka WeebeddaNo ratings yet
- ECLinPS Lite SPICE Model KitDocument4 pagesECLinPS Lite SPICE Model KitakteruzzamanNo ratings yet
- Sginverter 230515Document1 pageSginverter 230515Ibrahim Dalafika AbdullahiNo ratings yet
- An Intelligent Feedback Controller Design For EnerDocument8 pagesAn Intelligent Feedback Controller Design For EnerJocian VefNo ratings yet
- DCR01 Series, Regulated DC-DC Converter Modules 1 WattDocument28 pagesDCR01 Series, Regulated DC-DC Converter Modules 1 WattLullaby summerNo ratings yet





![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)