You might also like
- PDFDocument24 pagesPDFOlga Joy Labajo GerastaNo ratings yet
- ENGG3410 Lab 5 Prelab Design Speed ControllersDocument1 pageENGG3410 Lab 5 Prelab Design Speed ControllersaliNo ratings yet
- Lecture 24Document8 pagesLecture 24gewaray536No ratings yet
- Chys 3P15 Exam ReviewDocument1 pageChys 3P15 Exam ReviewAmanda ScottNo ratings yet
- Homework #1: Hint: You Can Use The Matlab Function Polyval To Evaluate The Numerator and DenominatorDocument3 pagesHomework #1: Hint: You Can Use The Matlab Function Polyval To Evaluate The Numerator and DenominatorMuhammed Hasan GUCLUNo ratings yet
- Assignment - 4Document1 pageAssignment - 4Utkarsh SinghNo ratings yet
- Control Systems Design TPDocument7 pagesControl Systems Design TPChhaylySrengNo ratings yet
- Eee342 hw3 PDFDocument2 pagesEee342 hw3 PDFRedion XhepaNo ratings yet
- Control Exp 10 Student ManualDocument7 pagesControl Exp 10 Student ManualMohammad Bony IsrailNo ratings yet
- EE132 Lab1 OL Vs CLDocument3 pagesEE132 Lab1 OL Vs CLthinkberry22No ratings yet
- Islamabad Campus Department of Electrical and Computer EngineeringDocument3 pagesIslamabad Campus Department of Electrical and Computer EngineeringLabeeb KhanNo ratings yet
- Control Exp 9 Student ManualDocument22 pagesControl Exp 9 Student ManualMohammad Bony IsrailNo ratings yet
- EC-1 Assignment 1 (22-S1)Document3 pagesEC-1 Assignment 1 (22-S1)Vipul PatilNo ratings yet
- 2002 Tutorial On Input Shaping Time Delay Control of Maneuvering Flexible StructuresDocument15 pages2002 Tutorial On Input Shaping Time Delay Control of Maneuvering Flexible StructuresgaayzqNo ratings yet
- Lab5a Fa10Document4 pagesLab5a Fa10alexlenevez_12130% (1)
- Using An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsDocument5 pagesUsing An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsAnuruddha WijerathneNo ratings yet
- ETS ADSP Genap 23-24-1Document6 pagesETS ADSP Genap 23-24-1Angga Tri SetiaNo ratings yet
- Class Test 2 2023 MemoDocument9 pagesClass Test 2 2023 MemoStalin KosterNo ratings yet
- MF2030 Final Exam Solution HT10Document12 pagesMF2030 Final Exam Solution HT10Athul_V_Dev_1688No ratings yet
- ps3 (1) From MAE 4780Document5 pagesps3 (1) From MAE 4780fooz10No ratings yet
- Controls Infosheet and Sample Problems 0Document11 pagesControls Infosheet and Sample Problems 0Md Nur-A-Adam DonyNo ratings yet
- Problem Set 5Document6 pagesProblem Set 5PeaceNo ratings yet
- Computer Science Textbook Solutions - 31Document30 pagesComputer Science Textbook Solutions - 31acc-expertNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument14 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- Carleton University Mechanical and Aerospace Engineering Feedback Control Systems MAAE 4500 Assignment # 6 Fall 2004Document7 pagesCarleton University Mechanical and Aerospace Engineering Feedback Control Systems MAAE 4500 Assignment # 6 Fall 2004jonthemesNo ratings yet
- Antenna Azimuth:An Introduction To Position Control SystemsDocument4 pagesAntenna Azimuth:An Introduction To Position Control SystemsMpho Senior0% (1)
- Acs 2Document9 pagesAcs 2Aditya PatilNo ratings yet
- UCK360E - Automatic Control IDocument1 pageUCK360E - Automatic Control IA DNo ratings yet
- Design of Integral Sliding Mode Controller For Servo DC MotorDocument7 pagesDesign of Integral Sliding Mode Controller For Servo DC MotorTolcha LemmaNo ratings yet
- Lab 6Document3 pagesLab 6Vu LeNo ratings yet
- Sample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Document8 pagesSample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Priyesh PandeyNo ratings yet
- University of Basrah For Gas and Oil College of Oil and Gas Engineering Department of Chemical and Petroleum Refining EngineeringDocument24 pagesUniversity of Basrah For Gas and Oil College of Oil and Gas Engineering Department of Chemical and Petroleum Refining Engineeringكرار نعيمNo ratings yet
- E Balagurusamy CH 6 SolutionDocument18 pagesE Balagurusamy CH 6 SolutionPriya BhavsarNo ratings yet
- Tutorial on Input Shaping and Time Delay Control of Flexible StructuresDocument16 pagesTutorial on Input Shaping and Time Delay Control of Flexible Structures원성규No ratings yet
- Control Systems I Self-Test QuestionsDocument7 pagesControl Systems I Self-Test QuestionsElie KabangaNo ratings yet
- Chapter 11 Design by Root LocusDocument17 pagesChapter 11 Design by Root Locusأسامة الشرعبيNo ratings yet
- CS KOM Fin Jan2021-V2Document1 pageCS KOM Fin Jan2021-V2Osman Agâh YILDIRIMNo ratings yet
- Design PID controllers for PLL loop, disk drive, and heat transfer problemsDocument2 pagesDesign PID controllers for PLL loop, disk drive, and heat transfer problemsiron standNo ratings yet
- Old Second Exams PDFDocument3 pagesOld Second Exams PDFAtikah AbdallaNo ratings yet
- 550 Final ProjectDocument9 pages550 Final ProjectvundavilliravindraNo ratings yet
- Test2 Skee3133 SolutionDocument10 pagesTest2 Skee3133 SolutionfrazatasNo ratings yet
- Feedback Control Systems AnalysisDocument43 pagesFeedback Control Systems AnalysisSalmaanCadeXaajiNo ratings yet
- CHEMICAL PROCESS CONTROL EXAM PAPERDocument12 pagesCHEMICAL PROCESS CONTROL EXAM PAPERIffatNo ratings yet
- PI Controller Design for DC MotorDocument4 pagesPI Controller Design for DC MotorsamielmadssiaNo ratings yet
- CHP 5Document69 pagesCHP 5million shiferawNo ratings yet
- AMRITA VISHWA VIDYAPEETAM CONTROL SYSTEMS LAB RECORD EXPERIMENT 1 IMPROVE TRANSIENT RESPONSEDocument48 pagesAMRITA VISHWA VIDYAPEETAM CONTROL SYSTEMS LAB RECORD EXPERIMENT 1 IMPROVE TRANSIENT RESPONSESanthoshi AkkisettiNo ratings yet
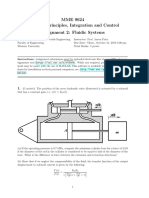
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsDocument2 pagesMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelNo ratings yet
- r05320803 - Process Dynamics & ControlDocument7 pagesr05320803 - Process Dynamics & ControlSRINIVASA RAO GANTANo ratings yet
- (Course) MIT Course Process Control Problems Set (2006)Document12 pages(Course) MIT Course Process Control Problems Set (2006)scottt_84No ratings yet
- Experiment 5Document5 pagesExperiment 5Usama NadeemNo ratings yet
- UFMFV7-15-2 Control (2017 November)Document6 pagesUFMFV7-15-2 Control (2017 November)Nuwan AsankaNo ratings yet
- Project1 ENGR 387Document1 pageProject1 ENGR 387capturemrahNo ratings yet
- 2.004 Dynamics and Control Ii: Mit OpencoursewareDocument7 pages2.004 Dynamics and Control Ii: Mit OpencoursewareVishay RainaNo ratings yet
- Control Law Comparison For Attitude Control of A SpacecraftDocument7 pagesControl Law Comparison For Attitude Control of A Spacecrafthossein_AUNo ratings yet
- Tutorial 5: Design Via State SpaceDocument2 pagesTutorial 5: Design Via State SpaceFauzi SukorNo ratings yet
- Assignment 1Document4 pagesAssignment 1Utkarsh AryaNo ratings yet
- WB2414-09 Mechatronic System Design: Control of A Loudspeaker SetupDocument5 pagesWB2414-09 Mechatronic System Design: Control of A Loudspeaker SetupNaman Singh NegiNo ratings yet
- Lab 2: Quanser Hardware and Proportional Control: I. ObjectiveDocument7 pagesLab 2: Quanser Hardware and Proportional Control: I. ObjectiveAndré LeopoldinoNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- AE 582 Robust Control in Aerospace Systems Homework 2: S S S S GDocument1 pageAE 582 Robust Control in Aerospace Systems Homework 2: S S S S GMuhammed Hasan GUCLUNo ratings yet
- G(S) K + R Y: AE 582 Robust Control in Aerospace Systems Homework 1Document1 pageG(S) K + R Y: AE 582 Robust Control in Aerospace Systems Homework 1Muhammed Hasan GUCLUNo ratings yet
- Homework #2Document2 pagesHomework #2Muhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems Homework 6Document1 pageAE 582 Robust Control in Aerospace Systems Homework 6Muhammed Hasan GUCLUNo ratings yet
- Homework #3Document3 pagesHomework #3Muhammed Hasan GUCLUNo ratings yet
- Ae582 HW5Document1 pageAe582 HW5Muhammed Hasan GUCLUNo ratings yet
- 1) The Lateral Motion of A Ship Moving With Constant Velocity Is Given byDocument2 pages1) The Lateral Motion of A Ship Moving With Constant Velocity Is Given byMuhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems: 3s G(S) S S 3 3s G(S) S 0.5s 2Document1 pageAE 582 Robust Control in Aerospace Systems: 3s G(S) S S 3 3s G(S) S 0.5s 2Muhammed Hasan GUCLUNo ratings yet
- Middle East Technical University Department of Aerospace Engineering AE 582: Robust Control in Aerospace SystemsDocument2 pagesMiddle East Technical University Department of Aerospace Engineering AE 582: Robust Control in Aerospace SystemsMuhammed Hasan GUCLUNo ratings yet
- AE582 Project AssignmentDocument4 pagesAE582 Project AssignmentMuhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems Homework 1: S S S S GDocument1 pageAE 582 Robust Control in Aerospace Systems Homework 1: S S S S GMuhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems Homework 6: HintsDocument1 pageAE 582 Robust Control in Aerospace Systems Homework 6: HintsMuhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems Homework 2: Handed Out: October 17 Due: October 31Document1 pageAE 582 Robust Control in Aerospace Systems Homework 2: Handed Out: October 17 Due: October 31Muhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems Homework 5 (Part-1)Document1 pageAE 582 Robust Control in Aerospace Systems Homework 5 (Part-1)Muhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems Fall 2012: Course ObjectivesDocument1 pageAE 582 Robust Control in Aerospace Systems Fall 2012: Course ObjectivesMuhammed Hasan GUCLUNo ratings yet
- AE172 Spring2011 HW2v2Document1 pageAE172 Spring2011 HW2v2Muhammed Hasan GUCLUNo ratings yet
- AE 172 Homework 2: Name: Muhammed Hasan Güçlü Student Number: 1443423 Submission Date: 20.04.11Document9 pagesAE 172 Homework 2: Name: Muhammed Hasan Güçlü Student Number: 1443423 Submission Date: 20.04.11Muhammed Hasan GUCLUNo ratings yet
- AE172Notes 05 04 2011 Section1Document20 pagesAE172Notes 05 04 2011 Section1Muhammed Hasan GUCLUNo ratings yet
- AE 584 Helicopter Dynamics, Stability and Control: Project Due On: Day of FinalDocument2 pagesAE 584 Helicopter Dynamics, Stability and Control: Project Due On: Day of FinalMuhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems: M S S W A S M S S WDocument1 pageAE 582 Robust Control in Aerospace Systems: M S S W A S M S S WMuhammed Hasan GUCLUNo ratings yet
- Dr. Ilkay Yavrucuk Spring 2011 AE 584 Helicopter Stability and Control Exercise For Midterm #1Document1 pageDr. Ilkay Yavrucuk Spring 2011 AE 584 Helicopter Stability and Control Exercise For Midterm #1Muhammed Hasan GUCLUNo ratings yet
- AE172Notes 05 04 2011 Section2Document19 pagesAE172Notes 05 04 2011 Section2Muhammed Hasan GUCLUNo ratings yet
- AE172Notes 07 04 2011 Section1-2Document10 pagesAE172Notes 07 04 2011 Section1-2Muhammed Hasan GUCLUNo ratings yet
- Spring 2010 AE172: Introduction To Aircraft Performance Elements of An AircraftDocument30 pagesSpring 2010 AE172: Introduction To Aircraft Performance Elements of An AircraftMuhammed Hasan GUCLUNo ratings yet
- AE172Notes 14 04 2011 Section1-2Document8 pagesAE172Notes 14 04 2011 Section1-2Muhammed Hasan GUCLUNo ratings yet
- AE172Notes 12 04 2011 Section1-2Document16 pagesAE172Notes 12 04 2011 Section1-2Muhammed Hasan GUCLUNo ratings yet
- AE172Notes 19 04 2011 Section1-2Document21 pagesAE172Notes 19 04 2011 Section1-2Muhammed Hasan GUCLUNo ratings yet
- Spring 2010 AE172: Introduction To Aircraft Performance Elements of An AircraftDocument19 pagesSpring 2010 AE172: Introduction To Aircraft Performance Elements of An AircraftMuhammed Hasan GUCLUNo ratings yet
- Lit: Zero-Shot Transfer With Locked-Image Text Tuning: Google Research, Brain Team, Z UrichDocument26 pagesLit: Zero-Shot Transfer With Locked-Image Text Tuning: Google Research, Brain Team, Z UrichSoumava PaulNo ratings yet
- Control Systems Transient ResponseDocument44 pagesControl Systems Transient Responseeng fourmNo ratings yet
- Soft Computing Techniques (ECE - 425)Document2 pagesSoft Computing Techniques (ECE - 425)DevenderNo ratings yet
- Solution Manual For Nonlinear Systems 3 e 3rd Edition Hassan K KhalilDocument34 pagesSolution Manual For Nonlinear Systems 3 e 3rd Edition Hassan K Khalilhattiebriggsposi8m100% (11)
- L19.Kd TreesDocument19 pagesL19.Kd TreesNageswara Rao Gottipati0% (1)
- Recipes For State Space Models in R Paul TeetorDocument27 pagesRecipes For State Space Models in R Paul Teetoralexa_sherpyNo ratings yet
- Or Question PapersDocument2 pagesOr Question PapersVenkataLakshmi KrishnasamyNo ratings yet
- Polynomial Regression: y A X + A X X XDocument5 pagesPolynomial Regression: y A X + A X X XEmil TengwarNo ratings yet
- FED-IIoT - A Robust Federated Malware DetectionDocument11 pagesFED-IIoT - A Robust Federated Malware DetectionSabit EzazNo ratings yet
- PDA2CFGDocument3 pagesPDA2CFGAmuk TamukNo ratings yet
- A High-Speed Unified Hardware Architecture for AES and the SHA-3 Candidate GrøstlDocument8 pagesA High-Speed Unified Hardware Architecture for AES and the SHA-3 Candidate GrøstlMinh HiếuNo ratings yet
- Theory: - Unification - Unification in Prolog - Proof SearchDocument63 pagesTheory: - Unification - Unification in Prolog - Proof SearchAulia RahmiNo ratings yet
- Transport and Assignment AnswerDocument20 pagesTransport and Assignment AnswerRishi Kesan DNo ratings yet
- Bead-Sort: A Natural Sorting Algorithm: 1 Beads and RodsDocument10 pagesBead-Sort: A Natural Sorting Algorithm: 1 Beads and RodsCthulhon100% (2)
- Works and Fuzzy Logic PDFDocument550 pagesWorks and Fuzzy Logic PDFmicuadriandanut100% (2)
- 73 220 Lecture13Document30 pages73 220 Lecture13api-26315128No ratings yet
- The Math of Deep Learning Neural Networks Simplified (Part 2Document9 pagesThe Math of Deep Learning Neural Networks Simplified (Part 2agalassiNo ratings yet
- Chapter 05 Advanced Data ModelingDocument24 pagesChapter 05 Advanced Data ModelingChong Fong KimNo ratings yet
- 9.8 Boundary Value Problems: C - 9 S D EDocument7 pages9.8 Boundary Value Problems: C - 9 S D EpathanshamsheerkhanNo ratings yet
- Plot Decision Regions with mlxtendDocument5 pagesPlot Decision Regions with mlxtendakhi016733No ratings yet
- Newnan - EEA14e - Appendix C Compound Interest TablesDocument31 pagesNewnan - EEA14e - Appendix C Compound Interest Tablessiti amirahNo ratings yet
- Layout Planning ALDEP Algorithm (125 ScoreDocument5 pagesLayout Planning ALDEP Algorithm (125 ScoreSahil KumarNo ratings yet
- Pre Ap Algebra 1 Pacing CalendarDocument1 pagePre Ap Algebra 1 Pacing CalendarSmita NagNo ratings yet
- Bart ManDocument40 pagesBart ManPedok GamerNo ratings yet
- KPK N: 1987 Imo Problems/ Problem 1 ProblemDocument3 pagesKPK N: 1987 Imo Problems/ Problem 1 ProblemKhant Si ThuNo ratings yet
- Department of Electrical and Computer Engineering ECED4601 Digital Control System Lab 4 Design of Discrete Time Control SystemDocument7 pagesDepartment of Electrical and Computer Engineering ECED4601 Digital Control System Lab 4 Design of Discrete Time Control SystemZhraa NorNo ratings yet
- Unique Decipherability NotesDocument5 pagesUnique Decipherability Notesmohammed229No ratings yet
- Determining Optimum Coefficients of IIR Digital Filter Using Analog To Digital MappingDocument5 pagesDetermining Optimum Coefficients of IIR Digital Filter Using Analog To Digital MappingDora TengNo ratings yet