You might also like
- 12 Circular TheoryDocument11 pages12 Circular TheoryAriba KhanNo ratings yet
- Lecture2 SBasu PDFDocument20 pagesLecture2 SBasu PDFHimashree BhattacharyyaNo ratings yet
- Tangential FlowDocument4 pagesTangential FlowFernandoNo ratings yet
- RotationDocument29 pagesRotationVincent VetterNo ratings yet
- Circular MotionDocument16 pagesCircular Motionnaresh chandraNo ratings yet
- 4.2.1 Circular MotionDocument8 pages4.2.1 Circular MotionshakiraNo ratings yet
- 03 - Rotational Motion - Theory & Example Module-2Document32 pages03 - Rotational Motion - Theory & Example Module-2Raju SinghNo ratings yet
- Vortexflowandimpulsemomentum 150316030613 Conversion Gate01Document42 pagesVortexflowandimpulsemomentum 150316030613 Conversion Gate01Bsc CivilNo ratings yet
- Circular Motion: 4.1b Further MechanicsDocument38 pagesCircular Motion: 4.1b Further MechanicsJeffreyNo ratings yet
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument30 pagesKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Circular Motion: A Particle P Travels in Circular Path. It Performs Circular Motion About O With Radius RDocument38 pagesCircular Motion: A Particle P Travels in Circular Path. It Performs Circular Motion About O With Radius ReltytanNo ratings yet
- Motion IcDocument8 pagesMotion IcRaraNo ratings yet
- CircularMotionExe Unacademy PDFDocument25 pagesCircularMotionExe Unacademy PDFChirag DalwaniNo ratings yet
- Lecture 3 Classical Mechanics EP204Document16 pagesLecture 3 Classical Mechanics EP204Niamh BrowneNo ratings yet
- Motion in A Plane All DerivationsDocument7 pagesMotion in A Plane All DerivationsADITIYA100% (1)
- Planar Kinematics of A Rigid Body (I) Impulse and Momentum: by Dr. Toh Hoong ThiamDocument34 pagesPlanar Kinematics of A Rigid Body (I) Impulse and Momentum: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Normal Tangential SlideDocument11 pagesNormal Tangential SlideShaktivell LetchumananNo ratings yet
- Mech Ops-6Document160 pagesMech Ops-6yedoke2515No ratings yet
- 6-Dynamics - Notes - Curvilinear Motion (Polar) - 2019 - AB - HFDocument16 pages6-Dynamics - Notes - Curvilinear Motion (Polar) - 2019 - AB - HFAyesha Maher khanNo ratings yet
- Lecture 2Document7 pagesLecture 2prashantNo ratings yet
- CurvilinearDocument18 pagesCurvilinearchirag gowdaNo ratings yet
- Country's Best Online Test PlatformDocument74 pagesCountry's Best Online Test PlatformSubhrasankar RaychaudhuryNo ratings yet
- Chapter 2.5 - Curvilinear Motion - Cylindrical Component - StudentversionDocument10 pagesChapter 2.5 - Curvilinear Motion - Cylindrical Component - StudentversionAmirulHanif AlyahyaNo ratings yet
- Class 11 Physics Most Important DerivationsDocument67 pagesClass 11 Physics Most Important Derivationsdhrumil100% (13)
- Circular MotionDocument3 pagesCircular Motiongokulkrishna2k7No ratings yet
- Kinematics of Rigid BodiesDocument45 pagesKinematics of Rigid BodiesJohn David DivinagraciaNo ratings yet
- Coriolis - It's All Maths' Fault-Eng - ItaDocument8 pagesCoriolis - It's All Maths' Fault-Eng - ItaLeonardo RubinoNo ratings yet
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument27 pagesKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- OCR ALevel H556 Circular MotionDocument12 pagesOCR ALevel H556 Circular MotionlollolNo ratings yet
- Chapter 6Document48 pagesChapter 6Hafizszul FeyzulNo ratings yet
- England P3Document29 pagesEngland P3Rahim BuxNo ratings yet
- Vortexflowandimpulsemomentum 150316030613 Conversion Gate01Document42 pagesVortexflowandimpulsemomentum 150316030613 Conversion Gate01Krishna P. YadavNo ratings yet
- H206 Circular Motion - 1. Notes (1718)Document23 pagesH206 Circular Motion - 1. Notes (1718)shakthee sivakumarNo ratings yet
- Circular Motion Study MaterialDocument31 pagesCircular Motion Study MaterialSuchay SawardekarNo ratings yet
- DH KH 2 R DR Q: Well Flow and Groundwater in Math Problems, Show All WorkDocument9 pagesDH KH 2 R DR Q: Well Flow and Groundwater in Math Problems, Show All WorkOwen Francis Arles MaongatNo ratings yet
- Phisics Note 2 - 0Document45 pagesPhisics Note 2 - 0geethaNo ratings yet
- Rotational and Translational MotionDocument37 pagesRotational and Translational MotionYu ErinNo ratings yet
- Lecture 08Document8 pagesLecture 08habboNo ratings yet
- GyroscopeDocument29 pagesGyroscopeGuru Ravindra ReddyNo ratings yet
- PHYS 170 November 8, 2019Document28 pagesPHYS 170 November 8, 2019Andrew WangNo ratings yet
- Circular Motion Part 1Document6 pagesCircular Motion Part 1Ikshya kcNo ratings yet
- VelocityDocument16 pagesVelocityhimanshu10092004No ratings yet
- 1 EgorovaDocument3 pages1 EgorovaabhayNo ratings yet
- CH12 - 6 - CylindricalComponentsDocument15 pagesCH12 - 6 - CylindricalComponentsmidhat.fatima180No ratings yet
- Chapter 2Document91 pagesChapter 2Won SeteNo ratings yet
- Orbital MotionDocument8 pagesOrbital Motionsundry299No ratings yet
- Orbital MotionDocument8 pagesOrbital Motionsundry299No ratings yet
- Dinamika RotasiDocument39 pagesDinamika RotasiLatifNo ratings yet
- Chapter05 Circular Motion SDocument9 pagesChapter05 Circular Motion SeltytanNo ratings yet
- Chapter 6 Ap PhysicsDocument16 pagesChapter 6 Ap Physicsapi-664002484No ratings yet
- Dynamics of Circular MotionDocument51 pagesDynamics of Circular MotionEsther oluwatosin AdeyemiNo ratings yet
- BEF 25903 - Kinematics of Translating and Rotating BodiesDocument52 pagesBEF 25903 - Kinematics of Translating and Rotating BodiesFikri MarjiNo ratings yet
- MODULE - 1.3 - PPT1.3 Motion of Particles Through FluidDocument10 pagesMODULE - 1.3 - PPT1.3 Motion of Particles Through Fluidjithin jacobNo ratings yet
- MTH125 Lect 12 23may PDFDocument9 pagesMTH125 Lect 12 23may PDFAmit kumarNo ratings yet
- ME101 Lecture24 KD PDFDocument21 pagesME101 Lecture24 KD PDFMary EuniceNo ratings yet
- Transition Curves in Road Design (Similar To Pun Miah)Document31 pagesTransition Curves in Road Design (Similar To Pun Miah)Nazib Ul Islam SazibNo ratings yet
- Example-Transpiration Cooling PDFDocument10 pagesExample-Transpiration Cooling PDFBerkcan ArslanNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Planar Kinematics of A Rigid Body (IV) Impulse and Momentum: by Dr. Toh Hoong ThiamDocument22 pagesPlanar Kinematics of A Rigid Body (IV) Impulse and Momentum: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Planar Kinematics of A Rigid Body (II) Impulse and Momentum: by Dr. Toh Hoong ThiamDocument14 pagesPlanar Kinematics of A Rigid Body (II) Impulse and Momentum: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Planar Kinematics of A Rigid Body (V) Impulse and Momentum: by Dr. Toh Hoong ThiamDocument22 pagesPlanar Kinematics of A Rigid Body (V) Impulse and Momentum: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Planar Kinematics of A Rigid Body (VI) Impulse and Momentum: by Dr. Toh Hoong ThiamDocument33 pagesPlanar Kinematics of A Rigid Body (VI) Impulse and Momentum: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinetics of A Particle: Impulse and Momentum (IV) : by Dr. Toh Hoong ThiamDocument30 pagesKinetics of A Particle: Impulse and Momentum (IV) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Planar Kinematics of A Rigid Body (I) Impulse and Momentum: by Dr. Toh Hoong ThiamDocument34 pagesPlanar Kinematics of A Rigid Body (I) Impulse and Momentum: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinetics of A Particle: Impulse and Momentum (III) : by Dr. Toh Hoong ThiamDocument25 pagesKinetics of A Particle: Impulse and Momentum (III) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinetics of A Particle: Work and Energy (II) : by Dr. Toh Hoong ThiamDocument26 pagesKinetics of A Particle: Work and Energy (II) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinetics of A Particle: Impulse and Momentum (II) : by Dr. Toh Hoong ThiamDocument23 pagesKinetics of A Particle: Impulse and Momentum (II) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinetics of A Particle: Impulse and Momentum (I) : by Dr. Toh Hoong ThiamDocument24 pagesKinetics of A Particle: Impulse and Momentum (I) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinetics of A Particle: Work and Energy (III) : by Dr. Toh Hoong ThiamDocument17 pagesKinetics of A Particle: Work and Energy (III) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinetics of A Particle: Force and Acceleration (I) : by Dr. Toh Hoong ThiamDocument30 pagesKinetics of A Particle: Force and Acceleration (I) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinetics of A Particle: Force and Acceleration (II) : by Dr. Toh Hoong ThiamDocument19 pagesKinetics of A Particle: Force and Acceleration (II) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinematics of A Particle: VIIIDocument16 pagesKinematics of A Particle: VIIInadia syahiraNo ratings yet
- Kinetics of A Particle: Force and Acceleration (III) : by Dr. Toh Hoong ThiamDocument22 pagesKinetics of A Particle: Force and Acceleration (III) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinetics of A Particle: Work and Energy (IV) : by Dr. Toh Hoong ThiamDocument26 pagesKinetics of A Particle: Work and Energy (IV) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument26 pagesKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument13 pagesKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument30 pagesKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument27 pagesKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument28 pagesKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument37 pagesKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- (BS en 13791 - 2007) - Assessment of In-Situ Compressive Strength in Structures and Pre-Cast Concrete Components.Document32 pages(BS en 13791 - 2007) - Assessment of In-Situ Compressive Strength in Structures and Pre-Cast Concrete Components.Adel A. AbdelazizNo ratings yet
- Presented at The 84Th Convention 1988march 1-4 Paris: Aud, ODocument15 pagesPresented at The 84Th Convention 1988march 1-4 Paris: Aud, Odonald141No ratings yet
- MODULE 1 Plane Surveying PDFDocument7 pagesMODULE 1 Plane Surveying PDFJexther Pascua NazarNo ratings yet
- ET SeriesDocument2 pagesET SeriesIgna ArceNo ratings yet
- Ni Olivine - Thermal Behavior of LiebengergiteDocument7 pagesNi Olivine - Thermal Behavior of LiebengergiteEduardo CandelaNo ratings yet
- (C) F0032-00016 - Aa Instrument Drawings Data Sheet Catalog For CCW PUMPDocument51 pages(C) F0032-00016 - Aa Instrument Drawings Data Sheet Catalog For CCW PUMPTrong Nguyen VanNo ratings yet
- Procedimento de Calibracion NAV401LDocument26 pagesProcedimento de Calibracion NAV401LEliana GuzmanNo ratings yet
- BHEL Testing ProceduresDocument59 pagesBHEL Testing ProceduresDinesh MehtaNo ratings yet
- E 423 - 71 R02 RtqymwDocument9 pagesE 423 - 71 R02 RtqymwJuanNo ratings yet
- Formazin-OCD&OMD eDocument1 pageFormazin-OCD&OMD eBojidar KirchevNo ratings yet
- Math Prioritize Part 2Document133 pagesMath Prioritize Part 2Edgar jr MadolidNo ratings yet
- Analytical Instruments Basics of Spectroscopy 1Document10 pagesAnalytical Instruments Basics of Spectroscopy 1Anindita RoyNo ratings yet
- Fan Coil Unit - SaiverDocument8 pagesFan Coil Unit - SaiverRyan Au YongNo ratings yet
- Lab Manuals Fluid Mechanics-IIDocument30 pagesLab Manuals Fluid Mechanics-IISri E.Maheswar Reddy Assistant ProfessorNo ratings yet
- Chapter 1Document61 pagesChapter 1SyahshaiNo ratings yet
- 3 - 1H NMRDocument3 pages3 - 1H NMRAbhishek kumarNo ratings yet
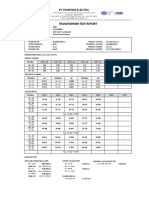
- Transformer Test ReportDocument2 pagesTransformer Test ReportsitiNo ratings yet
- CA Lesson 3 Relative VelocityDocument22 pagesCA Lesson 3 Relative VelocityShaimaa AbdulhamedNo ratings yet
- IS 40 Power FactorDocument2 pagesIS 40 Power Factortekeba lakeNo ratings yet
- 20 E - 0300.nsz Measurement ResultsDocument1 page20 E - 0300.nsz Measurement Resultsrefilda suhailiNo ratings yet
- Demo 30 Magbook General Science - Poonam SinghDocument30 pagesDemo 30 Magbook General Science - Poonam Singhmalik mohsinNo ratings yet
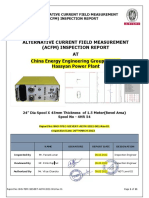
- BHS-TEPC-SIEVERT-ACFM-2022-001-Rev.01 - ACFM Inspection (Hassyan Power Plant)Document11 pagesBHS-TEPC-SIEVERT-ACFM-2022-001-Rev.01 - ACFM Inspection (Hassyan Power Plant)Saddam HossainNo ratings yet
- CDESL 3.1.1 Yoke Calibration Cert-Nov 2023Document1 pageCDESL 3.1.1 Yoke Calibration Cert-Nov 2023Elvis ThomasNo ratings yet
- Exam EEE 2215 Electromagnetics I - 2013-2014 Latest August 2013-1Document16 pagesExam EEE 2215 Electromagnetics I - 2013-2014 Latest August 2013-1IAMMARKSNo ratings yet
- Surveying Mod3 ContouringDocument20 pagesSurveying Mod3 ContouringVipiiinnn haiiNo ratings yet
- Pump Performance Datasheet: Operating Conditions LiquidDocument2 pagesPump Performance Datasheet: Operating Conditions LiquidDr Junaid Hassan MasoodiNo ratings yet
- (Maa 3.4) Arcs and Sectors - SolutionsDocument9 pages(Maa 3.4) Arcs and Sectors - Solutionsrogchen666No ratings yet
- Problem - Impact of JetDocument14 pagesProblem - Impact of JetMd RoknuzzamanNo ratings yet
- Capabilities of Clamp On Flow Meters FleximDocument10 pagesCapabilities of Clamp On Flow Meters FleximHARSH DHOLAKIYANo ratings yet
- Pharmaceutical Instrumental Analysis 2Document90 pagesPharmaceutical Instrumental Analysis 2Ayat AborassNo ratings yet