You might also like
- ADC and DACDocument54 pagesADC and DACM. D AdarshNo ratings yet
- Digital-to-Analog Converter: DEC (EC 2011)Document14 pagesDigital-to-Analog Converter: DEC (EC 2011)Arighna DebNo ratings yet
- MT 6215 Digital Electronic II.4Document14 pagesMT 6215 Digital Electronic II.4jonathan stevenNo ratings yet
- Chapter 5 Digital-To-Analog Converter DACDocument12 pagesChapter 5 Digital-To-Analog Converter DACDr Senthilkumar GNo ratings yet
- Experinment 10Document5 pagesExperinment 10mano17doremonNo ratings yet
- CHAPTER 4 PART 1 (DAC and ADC) PDFDocument58 pagesCHAPTER 4 PART 1 (DAC and ADC) PDFprahiiiNo ratings yet
- ConvertersDocument54 pagesConvertersyoboiiii649No ratings yet
- 1PH Half Bridge InverterDocument31 pages1PH Half Bridge InvertertintuvrNo ratings yet
- Topic 3 - Ac ConverterDocument53 pagesTopic 3 - Ac ConverterUsher Boy Blue WhiteNo ratings yet
- DC-DC Converter - STDDocument44 pagesDC-DC Converter - STDDIPTA DUTTA 1702122No ratings yet
- Single Phase Half Bridge InverterDocument29 pagesSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- Daq 2022Document36 pagesDaq 2022Stupid Bros productionNo ratings yet
- DAC and DiodesDocument48 pagesDAC and DiodesHaram MohammedNo ratings yet
- Single Phase Inverter 1Document9 pagesSingle Phase Inverter 1Zakaria ElbarbaryNo ratings yet
- Chapter 6 ConvertersDocument50 pagesChapter 6 ConvertersGohgulan Murugan100% (2)
- Analysis and Design of Analog Integrated Circuits Digital To Analog ConversionDocument31 pagesAnalysis and Design of Analog Integrated Circuits Digital To Analog ConversionAndrea FasatoNo ratings yet
- 10 DC-DC Buck ConverterDocument36 pages10 DC-DC Buck ConverterAnas RajputNo ratings yet
- Digital To Analog Converter: Nov. 1, 2005 Fabian Goericke, Keunhan Park, Geoffrey WilliamsDocument39 pagesDigital To Analog Converter: Nov. 1, 2005 Fabian Goericke, Keunhan Park, Geoffrey WilliamsPunit MishraNo ratings yet
- Analog To Digital Converters (Adcs) Digital To Analog Converters (Dacs) 111Document24 pagesAnalog To Digital Converters (Adcs) Digital To Analog Converters (Dacs) 111Nishant KumarNo ratings yet
- Unit 2Document37 pagesUnit 2kishorghatage89No ratings yet
- Biomedical Instrumentation: Lecture 4: D/A and A/D ConvertersDocument58 pagesBiomedical Instrumentation: Lecture 4: D/A and A/D ConvertersKarim SakrNo ratings yet
- Cours RedresseursDocument40 pagesCours RedresseursMoez YoussefNo ratings yet
- Digital To Analog Converter: Nov. 1, 2005 Fabian Goericke, Keunhan Park, Geoffrey WilliamsDocument39 pagesDigital To Analog Converter: Nov. 1, 2005 Fabian Goericke, Keunhan Park, Geoffrey WilliamsAlem AklilNo ratings yet
- Unit-III Adc & DacDocument20 pagesUnit-III Adc & DacK Krishna Murthy 184450No ratings yet
- DC-DC Converters - Boost Converter - 1Document11 pagesDC-DC Converters - Boost Converter - 1Ashraf YusofNo ratings yet
- 11 ADC-DAC - Rev03Document74 pages11 ADC-DAC - Rev03WEERAWAT AUA-AUAYCHAINo ratings yet
- ADCsDocument19 pagesADCssebastian caicedoNo ratings yet
- Chapter 2 Kim FDocument29 pagesChapter 2 Kim FMuhammad Sohaib ShahidNo ratings yet
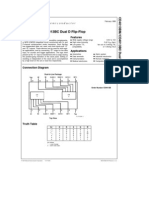
- CD 4013Document6 pagesCD 4013sprengerNo ratings yet
- CH 2 - Uncontrolled Rectifiers (Autosaved)Document92 pagesCH 2 - Uncontrolled Rectifiers (Autosaved)Gebremichael Teklay GebretsadikNo ratings yet
- EE3950 Class Notes Chapter 14Document23 pagesEE3950 Class Notes Chapter 14Jkun gamingNo ratings yet
- Experiment 1-Analog Diode Application CircuitsDocument8 pagesExperiment 1-Analog Diode Application Circuitsnaim yuslieNo ratings yet
- DC-AC Conversion - Lecture 10, 11 and 12Document45 pagesDC-AC Conversion - Lecture 10, 11 and 12madiha100% (1)
- Circuits and Electronics Chapter 3 and NotesDocument49 pagesCircuits and Electronics Chapter 3 and NotesDr. S. DasNo ratings yet
- Power Electronics: DC-DC Converters (Choppers)Document35 pagesPower Electronics: DC-DC Converters (Choppers)aswardi8756No ratings yet
- EEE206 Device Lab ManualDocument117 pagesEEE206 Device Lab ManualGiaa RahmanNo ratings yet
- Uncontrolled RectifierDocument18 pagesUncontrolled RectifierM. IslamNo ratings yet
- Buck Boost Converter EET504 PDFDocument13 pagesBuck Boost Converter EET504 PDFnasiruddinNo ratings yet
- CXD1175AM/AP: 8-Bit 20MSPS Video A/D Converter (CMOS)Document21 pagesCXD1175AM/AP: 8-Bit 20MSPS Video A/D Converter (CMOS)raviNo ratings yet
- Digital To Analog Converters: Andrew Gardner Muhammad Salman David Fernandes Jevawn RobertsDocument35 pagesDigital To Analog Converters: Andrew Gardner Muhammad Salman David Fernandes Jevawn Robertsmohan inumarthiNo ratings yet
- Converter & Timing CircuitDocument16 pagesConverter & Timing Circuityoboiiii649No ratings yet
- Basic Sensor and PrincipleDocument60 pagesBasic Sensor and Principleyeshwanth reddy RachumallaNo ratings yet
- SESM3030 - 03 AmplifiersDocument17 pagesSESM3030 - 03 Amplifiersjiales225No ratings yet
- Power Electronics Lecture 7: DC-DC Converters 2Document16 pagesPower Electronics Lecture 7: DC-DC Converters 2Solayman Salindato MasoNo ratings yet
- Analog To Digital ConverterDocument41 pagesAnalog To Digital Converterkhushbubansal100% (1)
- DC-AC Conversion - Lecture 10Document15 pagesDC-AC Conversion - Lecture 10madihaNo ratings yet
- CukDocument28 pagesCukEdon DergutiNo ratings yet
- Adc Dac 2Document7 pagesAdc Dac 2sabin3sNo ratings yet
- DC To AC Conversion (Inverter) : - General Concept - Single-Phase Inverter - Harmonics - Modulation - Three-Phase InverterDocument46 pagesDC To AC Conversion (Inverter) : - General Concept - Single-Phase Inverter - Harmonics - Modulation - Three-Phase Inverterhdrzaman9439No ratings yet
- Dac S06Document34 pagesDac S06Pankaj Kumar SoniNo ratings yet
- L16Document41 pagesL16Deepti SaraswatNo ratings yet
- Adc DacDocument15 pagesAdc Dackranthi59No ratings yet
- Lecture 8Document8 pagesLecture 8Centvie Joie F. AlbeosNo ratings yet
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesFrom EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesRating: 4.5 out of 5 stars4.5/5 (7)
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2From EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2No ratings yet
- Week 4Document89 pagesWeek 4abbazh rakhondeNo ratings yet
- Week 1Document88 pagesWeek 1abbazh rakhondeNo ratings yet
- Week 2Document70 pagesWeek 2abbazh rakhondeNo ratings yet
- Install Manjaro On Flash Drive (Persistent and Portable) - TechSolvePracDocument6 pagesInstall Manjaro On Flash Drive (Persistent and Portable) - TechSolvePracabbazh rakhondeNo ratings yet
- The Go Programming Language SpecificationDocument90 pagesThe Go Programming Language Specificationabbazh rakhondeNo ratings yet
- Library DinDocument2 pagesLibrary DinJohn Carlo QuiniaNo ratings yet
- Air Cooled Package York Ysb 1112 CDocument2 pagesAir Cooled Package York Ysb 1112 CStevler SheNo ratings yet
- White Paper Rosemount 1199 v15Document16 pagesWhite Paper Rosemount 1199 v15Romel RodriguezNo ratings yet
- Introduction To Iso 55000 Asset ManagementDocument25 pagesIntroduction To Iso 55000 Asset ManagementAndreja Zelenković100% (4)
- Case 5 2020 PDFDocument2 pagesCase 5 2020 PDFAhmadNo ratings yet
- Unit 2. Getting A Job Act. 3. Writing Task ForumDocument15 pagesUnit 2. Getting A Job Act. 3. Writing Task ForumRoger Garcia BeltranNo ratings yet
- Full Circle Magazine - Issue 116 ENDocument52 pagesFull Circle Magazine - Issue 116 ENRoman SukochevNo ratings yet
- Case Study - United Parcel Service, IncDocument3 pagesCase Study - United Parcel Service, IncManish Kumar100% (1)
- Film Capacitors: EPCOS Product Brief 2017Document12 pagesFilm Capacitors: EPCOS Product Brief 2017jeos20132013No ratings yet
- ReadMeSAP2000v1700 PDFDocument4 pagesReadMeSAP2000v1700 PDFTj TalhaNo ratings yet
- History of Operating SystemsDocument7 pagesHistory of Operating Systemsakhan10200No ratings yet
- NMPED License New Guide EditedDocument10 pagesNMPED License New Guide EditedVashnadze EDNo ratings yet
- GRPC For WCF DevelopersDocument109 pagesGRPC For WCF Developerschaba dealsNo ratings yet
- Diagrama Motor c9Document2 pagesDiagrama Motor c9Juan Pablo Leon Ruales83% (6)
- IACT 422 - 02 - Toyota Business PlanDocument58 pagesIACT 422 - 02 - Toyota Business PlanHazman Aziz0% (1)
- @airbus: For PN's ALLDocument2 pages@airbus: For PN's ALLPatrick TongNo ratings yet
- Gambroak200operationmanualaubtewt 1219987298 PDFDocument3 pagesGambroak200operationmanualaubtewt 1219987298 PDFWahyu Setyo PNo ratings yet
- Technology Integration-PortfolioDocument2 pagesTechnology Integration-Portfolioapi-403795899No ratings yet
- Authentication Technologies For Cloud Computing, IoT and Big DataDocument370 pagesAuthentication Technologies For Cloud Computing, IoT and Big DataHarsha Kumar100% (1)
- Lesson 14:: "The Software As An Educational Resource" ExperienceDocument6 pagesLesson 14:: "The Software As An Educational Resource" ExperienceJackie DumaguitNo ratings yet
- PLO 4-Facilities Requirement PlanningDocument16 pagesPLO 4-Facilities Requirement PlanningDhaniar PurwitasariNo ratings yet
- World Class Manufacturing, 16Document14 pagesWorld Class Manufacturing, 16Santhilal S Pillai100% (1)
- Porcupine Excel AssignmentDocument25 pagesPorcupine Excel AssignmentAndrea XiaoNo ratings yet
- Policomp - SDD Ac Servo Driver - Sinovo PDFDocument99 pagesPolicomp - SDD Ac Servo Driver - Sinovo PDFAntonio PassosNo ratings yet
- AsoDocument8 pagesAsoMario KPKNo ratings yet
- WL110 Flyer EnglishDocument11 pagesWL110 Flyer EnglishArslanNo ratings yet
- B15三轴汽缸多刀头运动控制系统 英文使用手册Document82 pagesB15三轴汽缸多刀头运动控制系统 英文使用手册Rabah RebouhNo ratings yet
- Dynamitron - October 2016 - WebDocument12 pagesDynamitron - October 2016 - WebChilmy Coklat SusuNo ratings yet
- Feanor LP30 Laser InterferometerDocument13 pagesFeanor LP30 Laser InterferometerfeanorouNo ratings yet
- Ford LaserDocument2 pagesFord LaserJoseMijaresNo ratings yet