You might also like
- Lesson Plan On DVTDocument18 pagesLesson Plan On DVTAlma Susan100% (1)
- Motion For Provisional Authority SAMPLEDocument1 pageMotion For Provisional Authority SAMPLEyassercarloman60% (5)
- Failure Mechanism in SemiconductorDocument34 pagesFailure Mechanism in Semiconductormuhdsyahid100% (1)
- Mobifone Tutela Analysis and Benchmarking July'23 - Ver1Document73 pagesMobifone Tutela Analysis and Benchmarking July'23 - Ver1simondiverNo ratings yet
- Initial Nutrition Assessment FormDocument3 pagesInitial Nutrition Assessment FormAmina HaiderNo ratings yet
- Enwinding Monitoring and VibrationDocument6 pagesEnwinding Monitoring and VibrationAnonymous BBX2E87aHNo ratings yet
- Epcos China (TDK) ER - 35!20!11Document7 pagesEpcos China (TDK) ER - 35!20!11leoNo ratings yet
- PD Diagnostics On Rotating Machines - Possibilities and Limitations - M. Hoof, S. Lanz - ABB - EIC - 1999Document6 pagesPD Diagnostics On Rotating Machines - Possibilities and Limitations - M. Hoof, S. Lanz - ABB - EIC - 1999tecolanzNo ratings yet
- PD Diagnostics On Rotating Machines Possibilities and Limitations M Hoof S Lanz ABB EIC 1999Document6 pagesPD Diagnostics On Rotating Machines Possibilities and Limitations M Hoof S Lanz ABB EIC 1999baboraik_4No ratings yet
- Circuit BreakerDocument6 pagesCircuit BreakerSindhuKumarNo ratings yet
- Dynamic Contact Resistance Measurements On HV Circuit Breaker IJERTV3IS10680 PDFDocument5 pagesDynamic Contact Resistance Measurements On HV Circuit Breaker IJERTV3IS10680 PDFSourav RanaNo ratings yet
- Partial Discharge Assessment in HVCTDocument4 pagesPartial Discharge Assessment in HVCTHoang PhapNo ratings yet
- A Very High Density Heatsink Mounted Inductor For Automotive AppDocument7 pagesA Very High Density Heatsink Mounted Inductor For Automotive AppTrần Đức TrườngNo ratings yet
- Screen Printed and Laminated Electrodes For Low-Cost Capasitive Level Measurement SystemsDocument6 pagesScreen Printed and Laminated Electrodes For Low-Cost Capasitive Level Measurement Systemsnozue.tatsuhiro nozueNo ratings yet
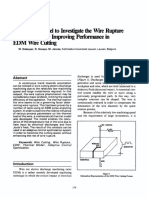
- Thermal Model To Investigate The Wire RuptureDocument12 pagesThermal Model To Investigate The Wire RuptureThi Phuong Thanh LeNo ratings yet
- Calculation of Thermally Permissible Short-Circuit Currents, Taking Into Account Non-Adiabatic Heating EffectsDocument12 pagesCalculation of Thermally Permissible Short-Circuit Currents, Taking Into Account Non-Adiabatic Heating EffectsFernando RamosNo ratings yet
- Anoop Seminar ReportDocument40 pagesAnoop Seminar ReportRijy Lorance100% (1)
- 417M Manual Rev7 2 LemiDocument38 pages417M Manual Rev7 2 LemiJohn Franc100% (1)
- PTFR Brochure en 2019 02 Grid PTR 0234Document8 pagesPTFR Brochure en 2019 02 Grid PTR 0234p m yadavNo ratings yet
- Loop Test and Core RepairDocument6 pagesLoop Test and Core Repairhino_kagu100% (1)
- Circuit Breakers: Principles, Assessment and Switching TransientsDocument69 pagesCircuit Breakers: Principles, Assessment and Switching TransientsSibin G ThomasNo ratings yet
- Integrated Generator Rotor and Stator Winding Condition MonitoringDocument8 pagesIntegrated Generator Rotor and Stator Winding Condition MonitoringPimolwan PikitklangNo ratings yet
- Review of Partial Discharge and Dielectric Loss Te PDFDocument6 pagesReview of Partial Discharge and Dielectric Loss Te PDFSuprit PradhanNo ratings yet
- Dynamic Behavior SMT Chip Capacitors During Solder Reflow: AbstmctDocument8 pagesDynamic Behavior SMT Chip Capacitors During Solder Reflow: AbstmctJim DotNetNo ratings yet
- High-Voltage Fuse-LinksDocument11 pagesHigh-Voltage Fuse-LinksSatheesh Kumar NatarajanNo ratings yet
- Voltgage Prof Odf Eelecterolyric CapaivueortsDocument6 pagesVoltgage Prof Odf Eelecterolyric CapaivueortsbhaskaaNo ratings yet
- 1 s2.0 S0007850613000577 MainDocument4 pages1 s2.0 S0007850613000577 MainBilay CernaNo ratings yet
- Cbip 88Document14 pagesCbip 88Sai Kanth100% (1)
- WEG Conservation of The Insulation of Wound Stators Surface Tracking Mechanismtechnical Articles EnglishDocument3 pagesWEG Conservation of The Insulation of Wound Stators Surface Tracking Mechanismtechnical Articles EnglishMauricio MartinsNo ratings yet
- 3 PH 3wire 11 KV FDR New - Dated 21.11.2011Document18 pages3 PH 3wire 11 KV FDR New - Dated 21.11.2011David AriasNo ratings yet
- Fast and Easily Implementable Detection CircuitsDocument9 pagesFast and Easily Implementable Detection CircuitsPablo Henrique Seibert JahnoNo ratings yet
- NSK2000 Page101 104-10Document4 pagesNSK2000 Page101 104-10José Luis Martínez MoranNo ratings yet
- Fuse Theory and OperationDocument4 pagesFuse Theory and OperationsuryaNo ratings yet
- Terminaiton Kit SpecificaitonDocument5 pagesTerminaiton Kit SpecificaitonVaibhav ShahNo ratings yet
- Electromagnetic Compatibility (EMC) and Variable Speed DrivesDocument2 pagesElectromagnetic Compatibility (EMC) and Variable Speed Drivessopan saNo ratings yet
- (2014) (Longtin Et Al) Sensors For Harsh Enviroments by Direct Write Thermal SprayDocument4 pages(2014) (Longtin Et Al) Sensors For Harsh Enviroments by Direct Write Thermal SprayRenkuReNo ratings yet
- Cellpack Contrax Joints PDFDocument4 pagesCellpack Contrax Joints PDFAmit BhatiaNo ratings yet
- Solderjet TeachnologyDocument10 pagesSolderjet TeachnologybseptrianiNo ratings yet
- Introducton 1.1 Overview:: Power Transformer Protection Using Microcontroller-Based RelayDocument51 pagesIntroducton 1.1 Overview:: Power Transformer Protection Using Microcontroller-Based RelayManoj NagarajanNo ratings yet
- Why The Operation Failure of High Breaking Capacity Fuses Is So Frequent?Document5 pagesWhy The Operation Failure of High Breaking Capacity Fuses Is So Frequent?BalusamyNo ratings yet
- Non-Destructive Electrical Test Methods For Evaluating High-Voltage Stator InsulationDocument9 pagesNon-Destructive Electrical Test Methods For Evaluating High-Voltage Stator InsulationHendi AfriyanNo ratings yet
- Installation, Maintenance and Observations of Pore Pressure Measuring Devices in Concrete and Masonry Dams - Code of PracticeDocument9 pagesInstallation, Maintenance and Observations of Pore Pressure Measuring Devices in Concrete and Masonry Dams - Code of PracticeFaisal RizwanNo ratings yet
- Potentiometers Trimmers PDFDocument6 pagesPotentiometers Trimmers PDFkoustubhmishra91No ratings yet
- Kinerja 1661243737Document12 pagesKinerja 1661243737nurmaladewiNo ratings yet
- Condenser Bushings 25 KVDocument8 pagesCondenser Bushings 25 KVOktafian PrabandaruNo ratings yet
- Partial Discharge Detection in Pressboards Immersed in Mineral Insulation Oil With Quantum Well Hall Effect Magnetic Field SensorsDocument8 pagesPartial Discharge Detection in Pressboards Immersed in Mineral Insulation Oil With Quantum Well Hall Effect Magnetic Field SensorsMuhammad Irfan NazhmiNo ratings yet
- Thermal Simulation and Optimization of A Common-Mode Filter For A SiC InverterDocument6 pagesThermal Simulation and Optimization of A Common-Mode Filter For A SiC InverterMaurizio TrancheroNo ratings yet
- Testing Distribution Switchgear For Partial DischargeDocument5 pagesTesting Distribution Switchgear For Partial DischargeJordan MontemayorNo ratings yet
- A Review Paper On (EDM) Electrical Discharge MachiningDocument3 pagesA Review Paper On (EDM) Electrical Discharge MachiningVishal Kumar JaiswalNo ratings yet
- Specifying A SolenoidDocument2 pagesSpecifying A SolenoidfadhlidzilNo ratings yet
- Calculations For Short Circuit Withstand Capability of A Distribution Transformer 0976 4860 2 142 150Document10 pagesCalculations For Short Circuit Withstand Capability of A Distribution Transformer 0976 4860 2 142 150Vishnu ShankerNo ratings yet
- Paper1137 SOLUTIONSFORINTERNALARCPROTECTIONFinalDocument6 pagesPaper1137 SOLUTIONSFORINTERNALARCPROTECTIONFinalcptripioNo ratings yet
- Electrical Tender NoticeDocument163 pagesElectrical Tender NoticeRaja Bharath DonthiNo ratings yet
- Multi-Chamber Arrester Study at Tropical Area For 20 KV Lines Lightning Protection SystemDocument5 pagesMulti-Chamber Arrester Study at Tropical Area For 20 KV Lines Lightning Protection SystemJARINGAN KTBNo ratings yet
- Early Hot Spot Detection Enabling Condition-Based MaintenanceDocument4 pagesEarly Hot Spot Detection Enabling Condition-Based Maintenancesridhar30481647No ratings yet
- Ceidp DWGDocument4 pagesCeidp DWGyahyaupsefNo ratings yet
- IMI Sensors ShearvsCompressionDocument5 pagesIMI Sensors ShearvsCompressionTim StubbsNo ratings yet
- 2-5 - 2-5-5-5 Stripline Test For Permittivity and Loss Tangent (Dielectric Constant and Dissipation Factor) at X-BandDocument25 pages2-5 - 2-5-5-5 Stripline Test For Permittivity and Loss Tangent (Dielectric Constant and Dissipation Factor) at X-BandApinan NamkanisornNo ratings yet
- Manual 2Document0 pagesManual 2Rafat ThongNo ratings yet
- 12.1 Glass and Plastic Transponders: 12.1.1 Module ManufactureDocument4 pages12.1 Glass and Plastic Transponders: 12.1.1 Module ManufactureRavindra KasukurthiNo ratings yet
- DatasheetDocument58 pagesDatasheetselocaNo ratings yet
- Ap02014 R1 SolderingDocument7 pagesAp02014 R1 SolderingBernz Apura FernandezNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Researcher Insights - The Neuroscience of SleepDocument20 pagesResearcher Insights - The Neuroscience of SleepAjla Tihic100% (1)
- Numerical Investigation of The Heat Transfer in Anannulus CylindricalDocument9 pagesNumerical Investigation of The Heat Transfer in Anannulus CylindricalAjla TihicNo ratings yet
- Thermocracking of A Mechanical SealDocument16 pagesThermocracking of A Mechanical SealAjla TihicNo ratings yet
- Experimental Thermal Analysis of A Mechanical Face Seal: K. AyadiDocument7 pagesExperimental Thermal Analysis of A Mechanical Face Seal: K. AyadiAjla TihicNo ratings yet
- Observations of ThermoelasticDocument14 pagesObservations of ThermoelasticAjla TihicNo ratings yet
- The Analog Linearization of Pt100 Working Characteristic: Serbian Journal of Electrical Engineering January 2015Document14 pagesThe Analog Linearization of Pt100 Working Characteristic: Serbian Journal of Electrical Engineering January 2015Ajla TihicNo ratings yet
- Evaluation - of - Pt100 - Sensor - Deflection - Effect - Durin ObaveznoDocument5 pagesEvaluation - of - Pt100 - Sensor - Deflection - Effect - Durin ObaveznoAjla TihicNo ratings yet
- Magnetic Drive Pumps .Current State and OverviewDocument8 pagesMagnetic Drive Pumps .Current State and OverviewAjla TihicNo ratings yet
- The Evidence Base For The Efficacy of Antibiotic Prophylaxis in Dental PracticeDocument17 pagesThe Evidence Base For The Efficacy of Antibiotic Prophylaxis in Dental PracticebmNo ratings yet
- Group 2 - Mini Project Slide (Currypuff Maker)Document24 pagesGroup 2 - Mini Project Slide (Currypuff Maker)Muhd Khairul AmriNo ratings yet
- Physical Examination and Restraint of CatDocument6 pagesPhysical Examination and Restraint of CatDominique Joy Gayares RasoNo ratings yet
- Gov Chapter 3Document31 pagesGov Chapter 3Isaiah ValenciaNo ratings yet
- CFBC Maintenance CostDocument16 pagesCFBC Maintenance Costyogeshmangal1317100% (1)
- RFMD SPA 2318Z DatasheetDocument38 pagesRFMD SPA 2318Z DatasheetNguyễn Văn QHuỳnhNo ratings yet
- DLL SubstanceDocument3 pagesDLL SubstanceReign Honrado100% (1)
- Maag WA One-Stage Gear Unit: For Horizontal Mill DrivesDocument8 pagesMaag WA One-Stage Gear Unit: For Horizontal Mill DrivesMuhammadNo ratings yet
- Why Am I A Living HeroDocument10 pagesWhy Am I A Living Herojf_dee24No ratings yet
- CEC OrganisationDocument3 pagesCEC OrganisationAndreas ErnstNo ratings yet
- 03 01 Straight LineDocument31 pages03 01 Straight LineSai Ganesh0% (1)
- FM formulas-Unit-6ADocument12 pagesFM formulas-Unit-6AÃkŞʜʌy VəřMʌNo ratings yet
- Sabiha Mid Term AssignmentDocument30 pagesSabiha Mid Term Assignmentanikb0% (1)
- Cmiller CSW 2010Document90 pagesCmiller CSW 2010dty001No ratings yet
- Affidavit of Service - FinDocument2 pagesAffidavit of Service - FinMa Charisse E. Gaud - BautistaNo ratings yet
- POWERFUL MAGIC RING - GET POWER, WEALTH, PROTECTION, LOVE, HEALTH Etc Call/wattsapp +27717097145 MAMA LAKIADocument16 pagesPOWERFUL MAGIC RING - GET POWER, WEALTH, PROTECTION, LOVE, HEALTH Etc Call/wattsapp +27717097145 MAMA LAKIAProfmama Lakia0% (2)
- Algebra I & II Cliff Notes, CheetsheetDocument3 pagesAlgebra I & II Cliff Notes, CheetsheetsillyginnyNo ratings yet
- Renewable Energy Systems (Inter Disciplinary Elective - I)Document2 pagesRenewable Energy Systems (Inter Disciplinary Elective - I)vishallchhayaNo ratings yet
- DRR Quarter 4 Week 1-2Document24 pagesDRR Quarter 4 Week 1-2Shastine ClaorNo ratings yet
- Hy1906b Hooyi PDFDocument11 pagesHy1906b Hooyi PDFJose Antonio Ramos MuñosNo ratings yet
- Waffle House Shooter Police Report For White House IncidentDocument2 pagesWaffle House Shooter Police Report For White House IncidentWJLA-TVNo ratings yet
- Reference Only: I Pus Pond StreetDocument132 pagesReference Only: I Pus Pond StreetJagdish ShindeNo ratings yet
- Homogenize RsDocument16 pagesHomogenize RsNamraNo ratings yet
- Honeywell CT45XP CT45 Configuration Guide GLOBAL V2Document47 pagesHoneywell CT45XP CT45 Configuration Guide GLOBAL V2Roy SalasNo ratings yet
- Case Digests in Statutory Construction Philippine Law StudentDocument58 pagesCase Digests in Statutory Construction Philippine Law StudentJoshua Emmanuel100% (5)
- SujaniDocument11 pagesSujaniKalAsh Kumar50% (2)